umwelt-online: Verordnung (EU) 2017/1151 zur Ergänzung der Verordnung (EG) Nr. 715/2007 über die Typgenehmigung von Kraftfahrzeugen hinsichtlich der Emissionen von leichten Personenkraftwagen und Nutzfahrzeugen (Euro 5 und Euro 6) und über den Zugang zu Fahrzeugreparatur- und -wartungsinformationen, zur Änderung der Richtlinie 2007/46/EG, der Verordnung (EG) Nr. 692/2008 sowie der Verordnung (EU) Nr. 1230/2012 und zur Aufhebung der Verordnung (EG) Nr. 692/2008 (6)
|
zurück | |
4. Abkürzungen
4.1. Allgemeine Abkürzungen18
| AC | Wechselstrom |
| CFV | Venturi-Rohr mit kritischer Strömung |
| CFO | Messblende für kritische Strömung |
| CLD | Chemilumineszenzdetektor |
| CLA | Chemilumineszenzanalysator |
| CVS | Probenahmeeinrichtung mit konstantem Volumen |
| DC | Gleichstrom |
| ET | Verdampfungsrohr |
| Extra High2 | Klasse 2 - WLTC-Zyklus mit sehr hoher Geschwindigkeit |
| Extra High3 | Klasse 3 - WLTC-Zyklus mit sehr hoher Geschwindigkeit |
| FCHV | Brennstoffzellen-Hybrid-Fahrzeug |
| FID | Flammenionisationsdetektor |
| FSD | Skalenendwert |
| GC | Gaschromatograph |
| HEPA | Hochleistungs-Partikelfilter/HEPA-Filter |
| HFID | Beheizter Flammenionisationsdetektor |
| High2 | Klasse 2 - WLTC-Zyklus mit hoher Geschwindigkeit |
| High3a | Klasse 3a - WLTC-Zyklus mit hoher Geschwindigkeit |
| High3b | Klasse 3b - WLTC-Zyklus mit hoher Geschwindigkeit |
| ICE | Verbrennungsmotor |
| LoD | Nachweisgrenze |
| LoQ | Quantifizierungsgrenze |
| Low1 | Klasse 1 - WLTC-Zyklus mit niedriger Geschwindigkeit |
| Low2 | Klasse 2 - WLTC-Zyklus mit niedriger Geschwindigkeit |
| Low3 | Klasse 3 - WLTC-Zyklus mit niedriger Geschwindigkeit |
| Medium1 | Klasse 1 - WLTC-Zyklus mit mittlerer Geschwindigkeit |
| Medium2 | Klasse 2 - WLTC-Zyklus mit mittlerer Geschwindigkeit |
| Medium3a | Klasse 3a - WLTC-Zyklus mit mittlerer Geschwindigkeit |
| Medium3b | Klasse 3b - WLTC-Zyklus mit mittlerer Geschwindigkeit |
| LC | Flüssigchromatographie |
| LPG | Flüssiggas |
| NDIR | Nichtdispersives Infrarot (Analysator) |
| NDUV | Nichtdispersives Ultraviolett |
| NG/biomethane | Erdgas/Biomethan |
| NMC | Nicht-Methan-Cutter |
| NOVC-FCHV | Nicht extern aufladbares Brennstoffzellen-Hybrid-Fahrzeug |
| NOVC | Nicht extern aufladbar |
| NOVC-HEV | Nicht extern aufladbares Hybridelektrofahrzeug |
| OVC-HEV | Extern aufladbares Hybridelektrofahrzeug |
| Pa | Vom Hintergrundfilter aufgenommene Partikelmasse |
| Pe | Vom Probenahmefilter aufgenommene Partikelmasse |
| PAO | Polyalphaolefin |
| PCF | Partikelvorklassierer |
| PCRF | Minderungsfaktor der Partikelkonzentration |
| PDP | Verdrängerpumpe |
| PER | Vollelektrische Reichweite |
| Per cent FS | Prozent des Skalenendwertes |
| PM | Partikelemissionen |
| PN | Partikelanzahlemissionen |
| PNC | Partikelzähler |
| PND1 | Erster Partikelanzahlverdünner |
| PND2 | Zweiter Partikelanzahlverdünner |
| PTS | Partikelübertragungssystem |
| PTT | Partikelübertragungsrohr |
| QCL-IR | Infrarot-Quantenkaskaden-Laser |
| RCDA | Tatsächliche Reichweite bei Entladung |
| RCB | REESS-Ladungsausgleich |
| REESS | Wiederaufladbares Speichersystem für elektrische Energie |
| RWK | Rollwiderstandskoeffizient |
| SSV | Subsonisches Venturirohr |
| USFM | Ultraschalldurchsatzmesser |
| VPR | Entferner flüchtiger Partikel |
| WLTC | Weltweiter Prüfzyklus für leichte Nutzfahrzeuge |
4.2. Chemische Symbole und Abkürzungen
| C1 | C1-äquivalenter Kohlenwasserstoff |
| CH4 | Methan |
| C2H6 | Ethan |
| C2H5OH | Ethanol |
| C3H8 | Propan |
| CO | Kohlenmonoxid |
| CO2 | Kohlendioxid |
| DOP | Dioctylphthalat |
| H2O | Wasser |
| NH3 | Ammoniak |
| NMHC | Nicht-Methan-Kohlenwasserstoffe |
| NOx | Stickoxide |
| NO | Stickstoffmonoxid |
| NO2 | Stickstoffdioxid |
| N2O | Distickstoffoxid |
| THC | Gesamtkohlenwasserstoffe |
5. Allgemeine Anforderungen
5.0. Jeder der in den Absätzen 5.6 bis 5.9 festgelegten Fahrzeugfamilien ist ein individuelles Identifizierungskennzeichen mit dem folgenden Format zuzuteilen:
FT-nnnnnnnnnnnnnnn-WMI-x
Dabei gilt:
FT ist das Identifizierungskennzeichen des Familientyps.
nnnnnnnnnnnnnnn ist eine aus maximal fünfzehn Zeichen bestehende Kette, für die ausschließlich folgende Zeichen verwendet werden dürfen: 0-9, A-Z und der Unterstrich "_".
WMI (world manufacturer identifier - Welt-Hersteller-Code) ist ein Code zur eindeutigen Identifizierung des Herstellers; er ist in ISO 3780:2009 definiert.
x ist entsprechend den folgenden Vorgaben auf "1" oder "0" zu setzen:
In den unter i), ii) und iii) beschriebenen Fällen muss die Familienkennung aus einer eindeutigen Kette aus n Zeichen und einem eindeutigen WMI-Code, gefolgt von "1", bestehen.
5.1. Das Fahrzeug und die Bauteile, die einen Einfluss auf die Emissionen gasförmiger Verbindungen, die Masse und die Anzahl von Partikeln haben können, sind so auszulegen, zu bauen und zu montieren, dass das Fahrzeug während seiner Lebensdauer bei normaler Nutzung und unter normalen Betriebsbedingungen wie Feuchtigkeit, Regen, Schnee, Hitze, Kälte, Sand, Schmutz, Vibrationen, Verschleiss usw. den in diesem Anhang enthaltenen Vorschriften genügt.
Diese Anforderungen gelten auch für die Sicherheit aller Schläuche, Dichtungen und Verbindungsstücke in Emissionsminderungssystemen.
5.1.1. - gestrichen -
5.2. Das Prüffahrzeug muss in Bezug auf seine emissionsrelevanten Bauteile und die Funktionsweise repräsentativ für die von der Genehmigung erfassten beabsichtigten Produktionsserien sein. Der Hersteller und die Genehmigungsbehörde legen im Einvernehmen fest, welches Modell eines Prüffahrzeugs als repräsentativ gilt.
5.3. Für die Fahrzeugprüfung geltende Bedingungen
5.3.1. Art und Menge der für die Emissionsprüfungen verwendeten Schmier- und Kühlmittel müssen den vom Hersteller für den normalen Fahrzeugbetrieb angegebenen Spezifikationen entsprechen.
5.3.2. Der für die Emissionsprüfungen verwendete Kraftstofftyp muss den Bestimmungen von Anhang IX entsprechen.
5.3.3. Alle Emissionsminderungssysteme müssen in funktionsfähigem Zustand sein.
5.3.4. Gemäß Artikel 5 Absatz 2 der Verordnung Nr. 715/2007 ist die Verwendung jeglicher Art von Abschalteinrichtung verboten.
5.3.5. Der Motor muss so ausgelegt sein, dass Emissionen aus dem Kurbelgehäuse vermieden werden.
5.3.6. Die für die Emissionsprüfungen verwendeten Reifen müssen den Vorschriften von Unteranhang 6 Absatz 2.4.5 dieses Anhangs genügen.
5.4. Einfüllöffnungen von Benzintanks
5.4.1. Nach den Vorschriften von Absatz 5.4.2 muss die Einfüllöffnung des Benzin- oder Ethanoltanks so beschaffen sein, dass dieser nicht mit einem Zapfventil mit einem Außendurchmesser von 23,6 mm oder mehr befüllt werden kann.
5.4.2. Absatz 5.4.1 gilt nicht für ein Fahrzeug, bei dem die beiden folgenden Bedingungen erfüllt sind:
5.5. Eingriffsicherheit elektronischer Systeme18
Die Bestimmungen zur Eingriffsicherheit elektronischer Systeme sind in Anhang I Absatz 2.3 festgehalten.
5.5.1. - gestrichen -18
5.5.2. - gestrichen -18
5.5.3. - gestrichen -18
5.5.4. - gestrichen -18
5.6. Interpolationsfamilie
5.6.1. Interpolationsfamilie für Fahrzeuge mit Verbrennungsmotor als einziger Antriebsart18
5.6.1.1. In den folgenden Fällen (und auch bei Kombinationen aus diesen Fällen) können Fahrzeuge Teil der gleichen Interpolationsfamilie sein:
5.6.1.2. Nur Fahrzeuge, die in Bezug auf die folgenden Fahrzeug-, Antriebsstrang- und Kraftübertragungsmerkmale identisch sind, können Teil derselben Interpolationsfamilie sein:
5.6.1.3. Wird ein alternativer Parameter wie etwa ein höherer Wert für nmin_drive gemäß Festlegung in Unteranhang 2 Absatz 2 k) oder eine ASM im Sinne von Unteranhang 2 Absatz 3.4 verwendet, darf ein solcher Parameter innerhalb einer Interpolationsfamilie jedoch nicht verschieden sein.
5.6.2. Interpolationsfamilie für nicht extern aufladbare Hybridelektrofahrzeuge und extern aufladbare Hybridelektrofahrzeuge18
Zusätzlich zu den in Absatz 5.6.1 enthaltenen Anforderungen gilt, dass nur extern aufladbare Hybridelektrofahrzeuge und nicht extern aufladbare Hybridelektrofahrzeuge, die in Bezug auf die folgenden Merkmale identisch sind, Teil der gleichen Interpolationsfamilie sein können:
5.6.3. Interpolationsfamilie für Elektrofahrzeuge18 18a
Nur Elektrofahrzeuge, die in Bezug auf die folgenden elektrischen Merkmale von Antriebsstrang und Kraftübertragung identisch sind, können Teil der selben Interpolationsfamilie sein:
5.7. Fahrwiderstandsfamilie (Straße)18
Nur Fahrzeuge, die in Bezug auf die folgenden Merkmale identisch sind, können Teil der selben Fahrwiderstandsfamilie (Straße) sein:
Ist für mindestens eine elektrische Maschine der Leerlauf eingelegt und ist das Fahrzeug nicht mit einem Ausrollmodus (Unteranhang 4 Absatz 4.2.1.8.5) ausgerüstet, sodass die elektrische Maschine keinen Einfluss auf den Fahrwiderstand hat, dann gelten die Kriterien von Absatz 5.6.2. Buchstabe a und Absatz 5.6.3 Buchstabe a.
Besteht außer in Bezug auf die Fahrzeugmasse, den Rollwiderstand und die Aerodynamik ein Unterschied, der einen nicht vernachlässigbaren Einfluss auf den Fahrwiderstand hat, gilt das Fahrzeug nicht als Teil der Familie, es sei denn, von der Genehmigungsbehörde wurde eine Genehmigung erteilt.
5.8. Fahrwiderstandsmatrix-Familie18
Fahrzeuge, die für eine technisch zulässige Gesamtmasse im beladenen Zustand von ≥ 3.000 kg ausgelegt sind, können Teil einer Fahrwiderstandsmatrix-Familie sein.
Die Fahrwiderstandsmatrix-Familie kann auch auf Fahrzeuge, für die eine Mehrstufen-Typgenehmigung oder auf Mehrstufenfahrzeuge, für die eine Einzelgenehmigung beantragt wird, angewendet werden.
In diesen Fällen gelten die Bestimmungen von Anhang XII Nummer 2.
Nur Fahrzeuge, die in Bezug auf die folgenden Merkmale identisch sind, können Teil der selben Fahrwiderstandsmatrix-Familie ein:
5.9. Familie in Bezug auf ein System mit periodischer Regeneration (Ki)18
Nur Fahrzeuge, die in Bezug auf die folgenden Merkmale identisch sind, können Teil derselben Familie in Bezug auf ein System mit periodischer Regenerierung sein:
5.9.1. - gestrichen -18
5.9.2. - gestrichen -18
6. Leistungsanforderungen
6.1. Grenzwerte18
Es gelten die Emissionsgrenzwerte in Anhang I Tabelle 2 der Verordnung (EG) Nr. 715/2007.
6.2. Prüfung
Die Prüfung ist wie folgt durchzuführen:
| Weltweiter Prüfzyklus für leichte Nutzfahrzeuge (WLTC) | Unteranhang 118 |
1. Allgemeine Anforderungen18
Der zu durchfahrende Zyklus hängt von dem Verhältnis von Nennleistung zu Masse in fahrbereitem Zustand des Prüffahrzeugs abzüglich 75 kg, W/kg, und seiner Höchstgeschwindigkeit vmax ab.
Der sich aus den Anforderungen dieses Unteranhangs ergebende Zyklus wird in anderen Teilen des Anhangs als "anwendbarer Zyklus" bezeichnet.
2. Fahrzeugklassen18
2.1. Fahrzeuge der Klasse 1 haben ein Verhältnis von Leistung zu Masse in fahrbereitem Zustand abzüglich 75 kg von Pmr ≤ 22 W/kg.
2.2. Fahrzeuge der Klasse 2 haben ein Verhältnis von Leistung zu Masse in fahrbereitem Zustand abzüglich 75 kg von > 22 aber ≤ 34 W/kg.
2.3. Fahrzeuge der Klasse 3 haben ein Verhältnis von Leistung zu Masse in fahrbereitem Zustand abzüglich 75 kg von > 34 W/kg.
2.3.1. Fahrzeuge der Klasse 3 werden entsprechend ihrer Höchstgeschwindigkeit vmax in zwei Unterklassen aufgeteilt.
2.3.1.1. Fahrzeuge der Klasse 3a mit vmax < 120 km/h.
2.3.1.2. Fahrzeuge der Klasse 3b mit vmax ≥ 120 km/h.
2.3.2. Alle gemäß Unteranhang 8 geprüften Fahrzeuge gelten als Fahrzeuge der Klasse 3.
3. Prüfzyklen18
3.1. Zyklus der Klasse 118
3.1.1. Ein vollständiger Zyklus für Klasse 1 besteht aus einer Niedrigwertphase (Low1), einer Mittelwertphase (Medium1) und einer zusätzlichen Niedrigwertphase (Low1).
3.1.2. Die Phase Low1 ist in Abbildung A1/1 und in Tabelle A1/1 beschrieben.
3.1.3. Die Phase Medium1 ist in Abbildung A1/2 und in Tabelle A1/2 beschrieben.
3.2. Zyklus der Klasse 218
3.2.1. Ein vollständiger Zyklus für Klasse 2 besteht aus einer Niedrigwertphase (Low2), einer Mittelwertphase (Medium2), einer Hochwertphase (High2) und einer Höchstwertphase (Extra High2).
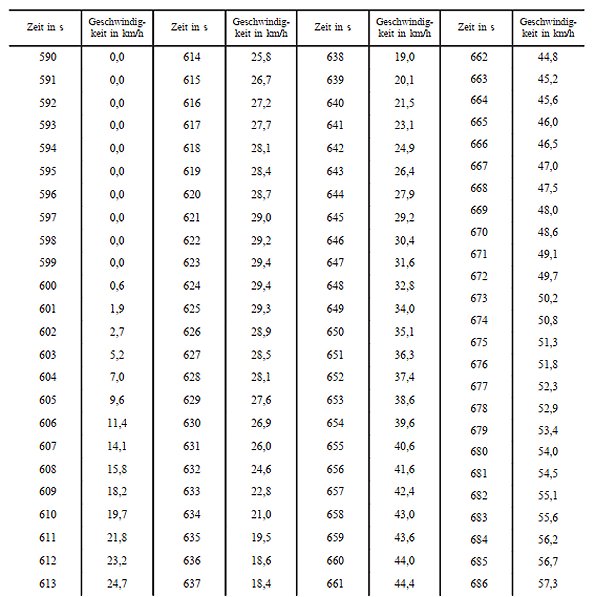
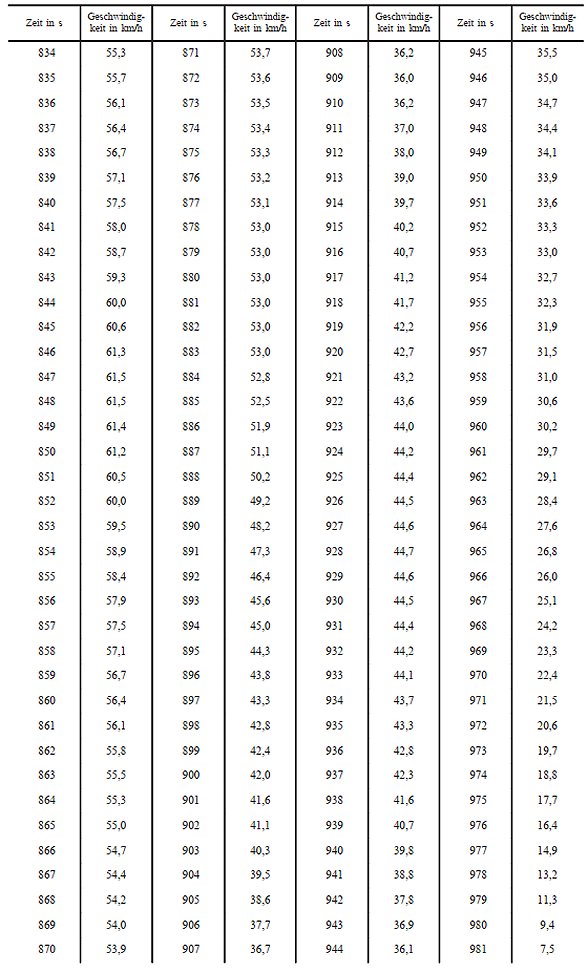
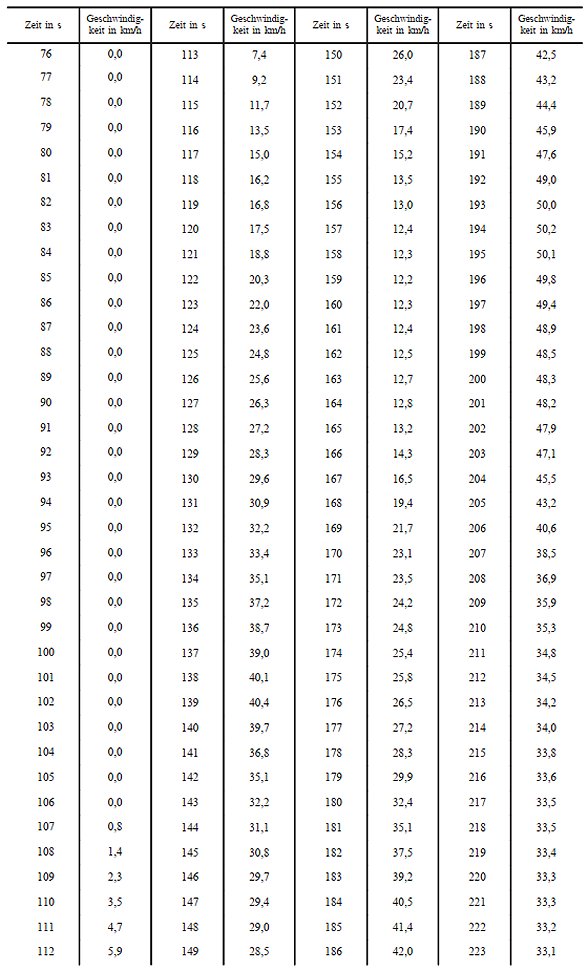
3.2.2. Die Phase Low2 ist in Abbildung A1/3 und in Tabelle A1/3 beschrieben.
3.2.3. Die Phase Medium2 ist in Abbildung A1/4 und in Tabelle A1/4 beschrieben.
3.2.4. Die Phase Medium2 ist in Abbildung A1/5 und in Tabelle A1/5 beschrieben.
3.2.5. Die Phase Extra High2 ist in Abbildung A1/6 und in Tabelle A1/6 beschrieben.
3.3. Zyklus der Klasse 318
Die Zyklen für Klasse 3 werden entsprechend der Unterteilung der Fahrzeuge der Klasse 3 in zwei Unterklassen aufgeteilt.
3.3.1. Fahrzeuge der Klasse 3a mit vmax < 120 km/h18
3.3.1.1. Ein vollständiger Zyklus besteht aus einer Niedrigwertphase (Low3), einer Mittelwertphase (Medium3a), einer Hochwertphase (High3a) und einer Höchstwertphase (Extra High3).
3.3.1.2 Die Phase Low3 ist in Abbildung A1/7 und in Tabelle A1/7 beschrieben.
3.3.1.3. Die Phase Medium3a ist in Abbildung A1/8 und in Tabelle A1/8 beschrieben.
3.3.1.4 Die Phase High3a ist in Abbildung A1/10 und in Tabelle A1/10 beschrieben.
3.3.1.5. Die Phase Extra High3 ist in Abbildung A1/12 und in Tabelle A1/12 beschrieben.
3.3.2. Zyklus für Klasse 3b18
3.3.2.1. Ein vollständiger Zyklus besteht aus einer Niedrigwertphase (Low3), einer Mittelwertphase (Medium3b), einer Hochwertphase (High3b) und einer Höchstwertphase (Extra High3).
3.3.2.2 Die Phase Low3 ist in Abbildung A1/7 und in Tabelle A1/7 beschrieben.
3.3.2.3. Die Phase Medium3b ist in Abbildung A1/9 und in Tabelle A1/9 beschrieben.
3.3.2.4 Die Phase High3b ist in Abbildung A1/11 und in Tabelle A1/11 beschrieben.
3.3.2.5. Die Phase Extra High3 ist in Abbildung A1/12 und in Tabelle A1/12 beschrieben.
3.4. Dauer aller Phasen18
3.4.1. Alle Phasen mit niedriger Geschwindigkeit (low) dauern 589 Sekunden.
3.4.2. Alle Phasen mit mittlerer Geschwindigkeit (medium) dauern 433 Sekunden.
3.4.3. Alle Phasen mit hoher Geschwindigkeit (high) dauern 455 Sekunden.
3.4.4. Alle Phasen mit sehr hoher Geschwindigkeit (extra high) dauern 323 Sekunden.
3.5. WLTC-Stadtzyklen18
Im Fall von Fahrzeugen der Klassen 3a und 3b sind extern aufladbare Hybridelektrofahrzeuge und Elektrofahrzeuge anhand der WLTC- und WLTC-Stadtzyklen (siehe Unteranhang 8) zu prüfen.
Der WLTC-Stadtzyklus besteht nur aus den Phasen mit niedriger und mittlerer Geschwindigkeit.
4. WLTC-Zyklus für Klasse 118
Abbildung A1/1 WLTC-Zyklus für Klasse 1, Phase Low118

Abbildung A1/2 WLTC-Zyklus für Klasse 1, Phase Medium118
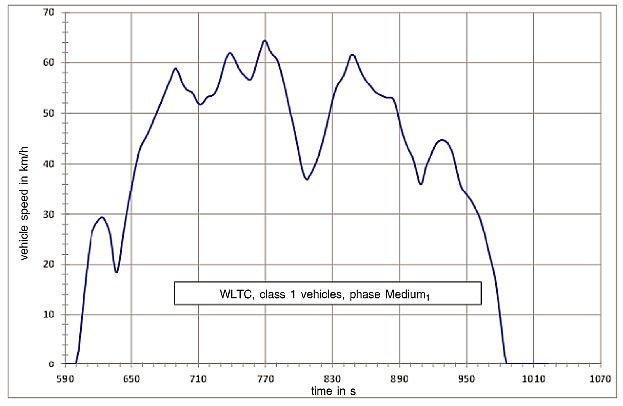
Tabelle A1/1 WLTC-Zyklus für Klasse 1, Phase Low118
 |
 |
 |
 |
 |
Tabelle A1/2 WLTC-Zyklus für Klasse 1, Phase Medium118
 |
 |
 |
 |
5. WLTC-Zyklus für Klasse 218
Abbildung A1/3 WLTC-Zyklus für Klasse 2, Phase Low218
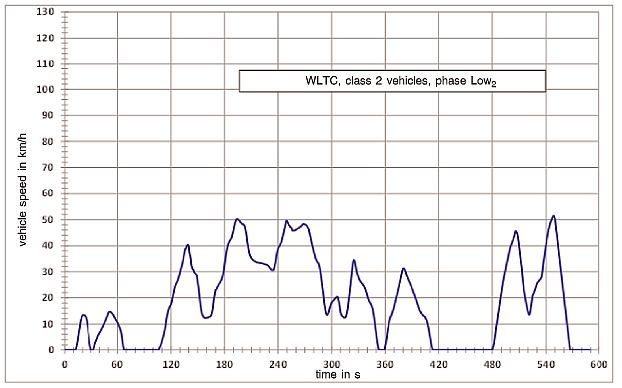
Abbildung A1/4 WLTC-Zyklus für Klasse 2, Phase Medium218

Abbildung A1/5 WLTC-Zyklus für Klasse 2, Phase High218

Abbildung A1/6 WLTC-Zyklus für Klasse 2, Phase Extra High218

Tabelle A1/3 WLTC-Zyklus für Klasse 2, Phase Low218
 |
 |
 |
 |
 |
Tabelle A1/4 WLTC-Zyklus für Klasse 2, Phase Medium218
 |
 |
 |
 |
Tabelle A1/5 WLTC-Zyklus für Klasse 2, Phase High218
 |
 |
 |
 |
Tabelle A1/6 WLTC-Zyklus für Klasse 2, Phase Extra High218
 |
 |
 |
6. WLTC-Zyklus für Klasse 318
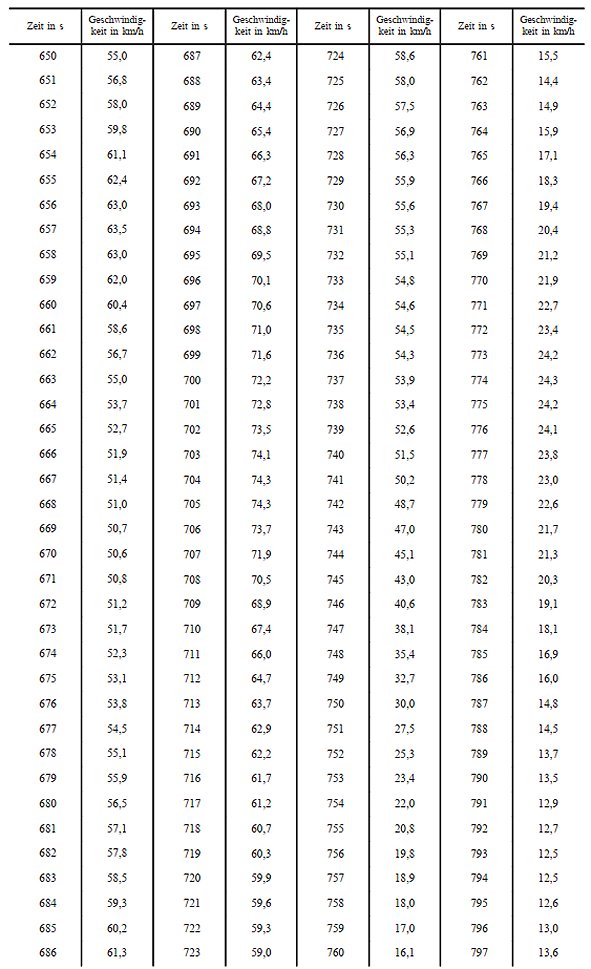
Abbildung A1/7 WLTC-Zyklus für Klasse 3, Phase Low318

Abbildung A1/8 WLTC-Zyklus für Klasse 3a, Phase Medium3a18
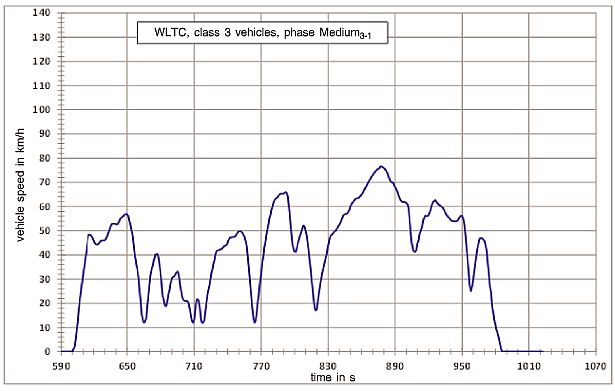
Abbildung A1/9 WLTC-Zyklus für Klasse 3b, Phase Medium3b18

Abbildung A1/10 WLTC-Zyklus für Klasse 3a, Phase High3a18

Abbildung A1/11 WLTC-Zyklus für Klasse 3b, Phase High3b18

Abbildung A1/12 WLTC-Zyklus für Klasse 3, Phase Extra High318
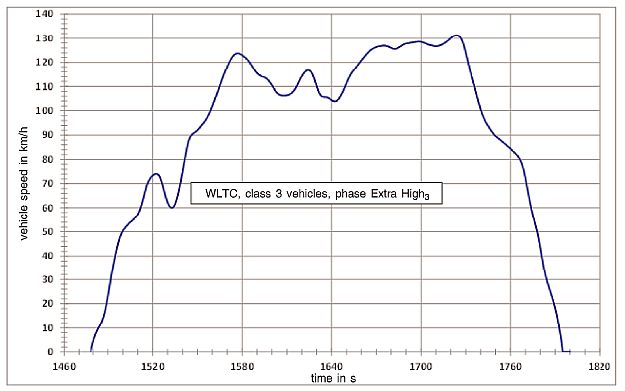
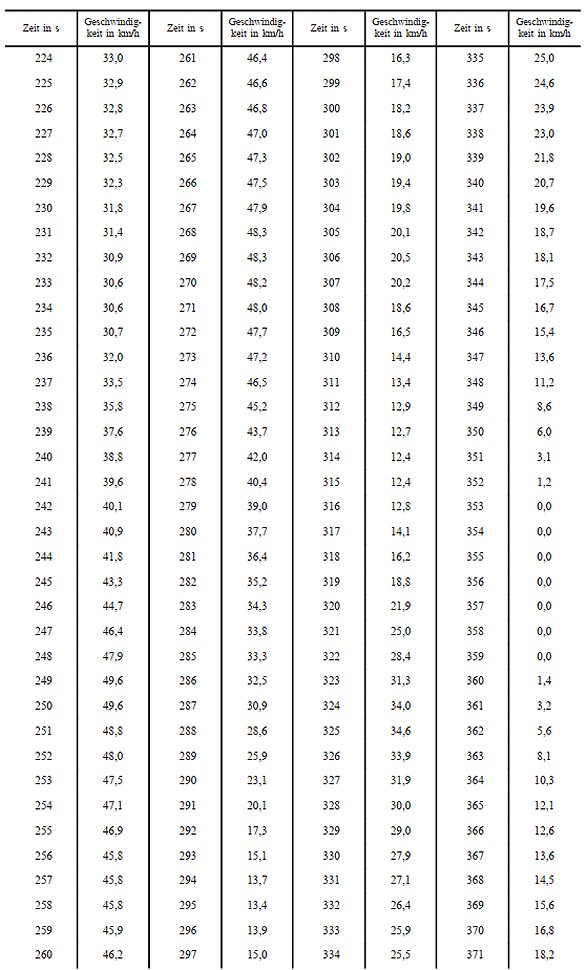
Tabelle A1/7 WLTC-Zyklus für Klasse 3, Phase Low318
 |
 |
 |
 |
Tabelle A1/8 WLTC-Zyklus für Klasse 3a, Phase Medium3a18
 |
 |
 |
Tabelle A1/9 WLTC-Zyklus für Klasse 3b, Phase Medium3b18
 |
 |
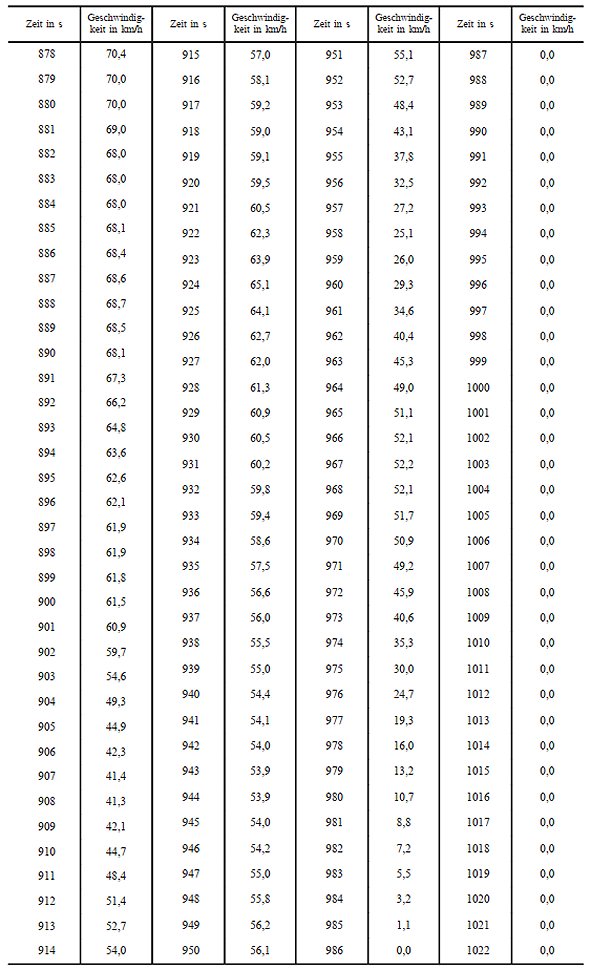 |
Tabelle A1/10 WLTC-Zyklus für Klasse 3a, Phase High3a18
 |
 |
 |
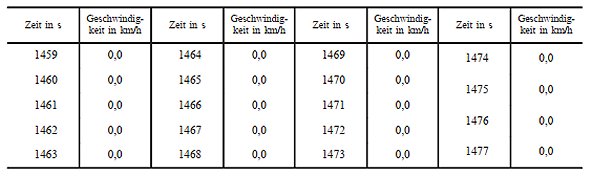 |
Tabelle A1/11 WLTC-Zyklus für Klasse 3b, Phase High3b18
 |
 |
 |
 |
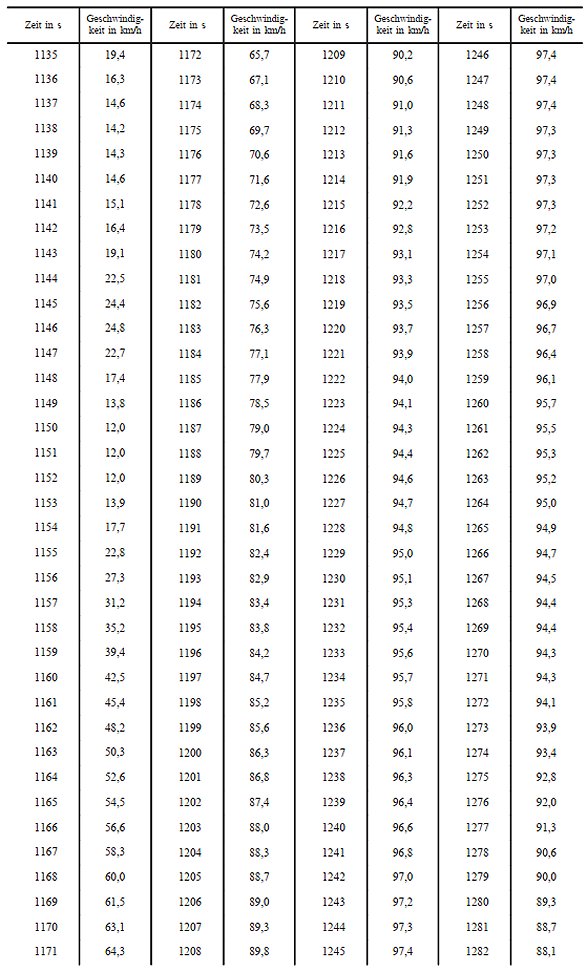
Tabelle A1/12 WLTC-Zyklus für Klasse 3, Phase Extra High318
 |
 |
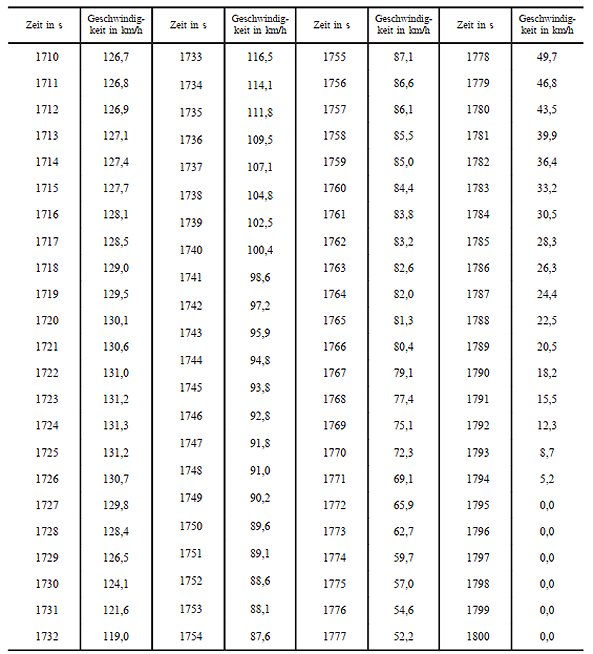 |
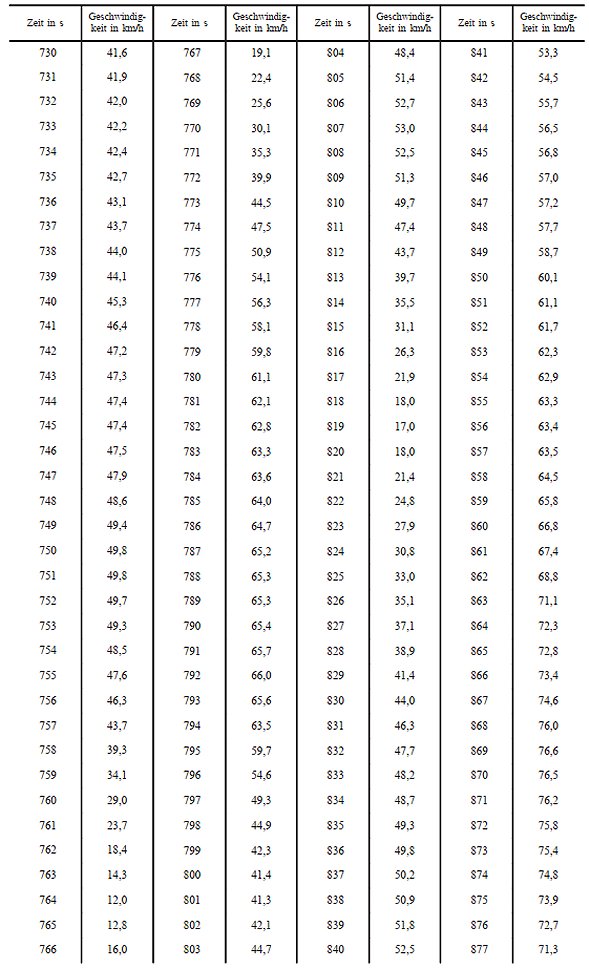
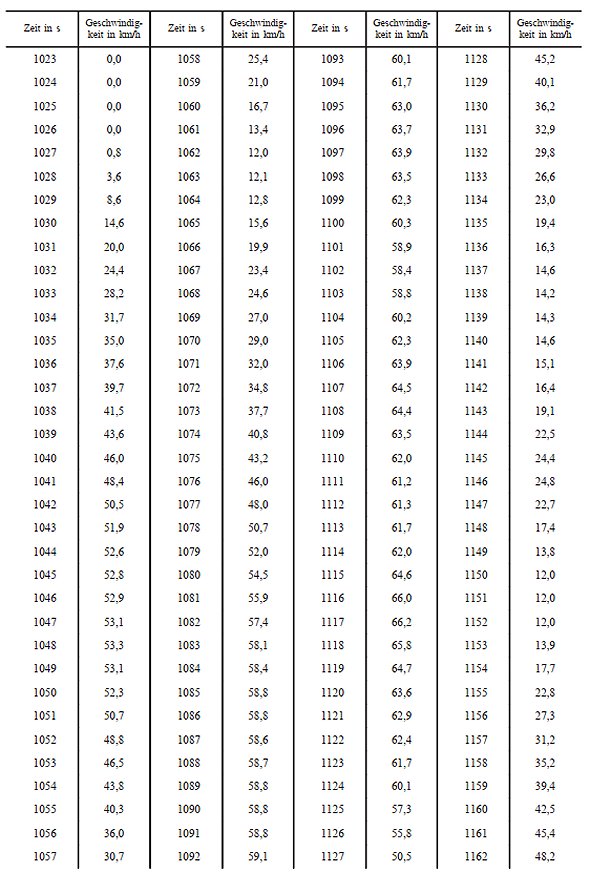
7. Identifizierung des Zyklus
Zur Bestätigung der Auswahl der richtigen Zyklusversion oder der Verwendung des richtigen Zyklus durch das Betriebssystem des Prüfstands sind in Tabelle A1/13 Kontrollsummen in Bezug auf die Werte der Fahrzeuggeschwindigkeit für die Zyklusphasen und den gesamten Zyklus enthalten.
Tabelle A1/13 1 Hz-Kontrollsummen18
| Zyklus Klasse | Zyklusphase | Kontrollsumme der 1 Hz-Sollgeschwindigkeiten des Fahrzeugs |
| Klasse 1 | Low | 11.988,4 |
| Medium | 17.162,8 | |
| Low | 11.988,4 | |
| Insgesamt | 41.139,6 | |
| Klasse 2 | Low | 11.162,2 |
| Medium | 17.054,3 | |
| High | 24.450,6 | |
| Extra High | 28.869,8 | |
| Insgesamt | 81.536,9 | |
| Klasse 3a | Low | 11.140,3 |
| Medium | 16.995,7 | |
| High | 25.646,0 | |
| Extra High | 29.714,9 | |
| Insgesamt | 83.496,9 | |
| Klasse 3b | Low | 11.140,3 |
| Medium | 17.121,2 | |
| High | 25.782,2 | |
| Extra High | 29.714,9 | |
| Insgesamt | 83.758,6 |
8. Zyklusänderung
Absatz 8 dieses Unteranhangs gilt nicht für: extern aufladbare Hybridelektrofahrzeuge, nicht extern aufladbare Hybridelektrofahrzeuge und nicht extern aufladbare Brennstoffzellen-Hybrid-Fahrzeuge.
8.1. Allgemeine Bemerkungen18
Es können Beeinträchtigungen des Fahrverhaltens bei Fahrzeugen auftreten, deren Verhältnisse von Leistung zu Masse nahe an den Grenzwerten zwischen Klasse 1 und Klasse 2, Klasse 2 und Klasse 3 liegen, oder bei Fahrzeugen mit sehr geringer Leistung in Klasse 1.
Da sich diese Probleme hauptsächlich auf Zyklusphasen mit einer Kombination aus hoher Fahrzeuggeschwindigkeit und hohen Beschleunigungswerten statt auf die Höchstgeschwindigkeit des Zyklus beziehen, ist das Miniaturisierungsverfahren anzuwenden, um das Fahrverhalten zu verbessern.
8.2. In diesem Absatz wird das Miniaturisierungsverfahren zur Änderung des Zyklusprofils beschrieben.
8.2.1. Miniaturisierungsverfahren für Fahrzeuge der Klasse 1
Abbildung A1/14 zeigt biespielhaft eine miniaturisierte Phase mittlerer Geschwindigkeit im WLTC-Zyklus für Fahrzeuge der Klasse 1.
Abbildung A1/14 Miniaturisierte Phase mittlerer Geschwindigkeit im WLTC-Zyklus für Fahrzeuge der Klasse 1
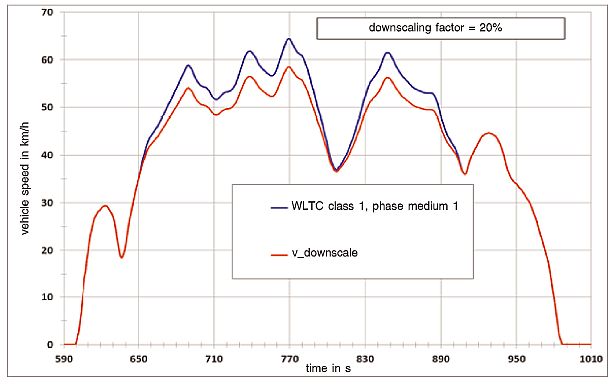
Im Zyklus der Klasse 1 erfolgt die Miniaturisierung im Zeitraum zwischen Sekunde 651 und Sekunde 906. In diesem Zeitraum ist die Beschleunigung für den ursprünglichen Zyklus mit folgender Gleichung zu berechnen:
![]()
Dabei ist:
vi die Fahrzeuggeschwindigkeit in km/h
i die Zeit zwischen Sekunde 651 und Sekunde 906
Die Miniaturisierung muss zuerst im Zeitraum zwischen Sekunde 651 und Sekunde 848 erfolgen. Die miniaturisierte Geschwindigkeitskurve ist dann mit folgender Gleichung zu berechnen:

Um bei Sekunde 907 die ursprüngliche Fahrzeuggeschwindigkeit zu erhalten, ist für die Verzögerung ein Korrekturfaktor mit folgender Gleichung zu berechnen:
fcorr_dec = (vdsc_848 - 36,7) / (vorig_848 - 36,7)
dabei ist 36,7 km/h die ursprüngliche Fahrzeuggeschwindigkeit bei Sekunde 907.
Die miniaturisierte Fahrzeuggeschwindigkeit zwischen Sekunde 849 und Sekunde 906 ist dann mit folgender Gleichung zu berechnen:
![]()
für i = 849 bis 906.
8.2.2. Miniaturisierungsverfahren für Fahrzeuge der Klasse 218
Da sich die Beeinträchtigungen des Fahrverhaltens ausschließlich auf die Phasen sehr hoher Geschwindigkeit ("Extra High") der Zyklen für die Klasse2 und die Klasse 3 beziehen, bezieht sich die Miniaturisierung auf die Zeitabschnitte der Phasen mit sehr hoher Geschwindigkeit, in denen mit Beeinträchtigungen des Fahrverhaltens zu rechnen ist (siehe Abbildungen A1/15 und A1/16).
Abbildung A1/15 Miniaturisierte Phase sehr hoher Geschwindigkeit im WLTC-Zyklus für Fahrzeuge der Klasse 2

Im Zyklus der Klasse 2 erfolgt die Miniaturisierung im Zeitraum zwischen Sekunde 1520 und Sekunde 1742. In diesem Zeitraum ist die Beschleunigung für den ursprünglichen Zyklus mit folgender Gleichung zu berechnen:
![]()
Dabei ist:
vi die Fahrzeuggeschwindigkeit in km/h
i die Zeit zwischen Sekunde 1520 und Sekunde 1742
Die Miniaturisierung muss zuerst im Zeitraum zwischen Sekunde 1520 und Sekunde 1725 erfolgen. Sekunde 172 5 ist der Zeitpunkt, an dem die Höchstgeschwindigkeit der Phase sehr hoher Geschwindigkeit erreicht ist. Die miniaturisierte Geschwindigkeitskurve ist dann mit folgender Gleichung zu berechnen:

Um bei Sekunde 1743 die ursprüngliche Fahrzeuggeschwindigkeit zu erhalten, ist für die Verzögerung ein Korrekturfaktor mit folgender Gleichung zu berechnen:
fcorr_dec = (vdsc_1725 - 90,4) / (vorig_1725 - 90,4)
dabei ist 90,4 km/h die ursprüngliche Fahrzeuggeschwindigkeit bei Sekunde 1743.
Die miniaturisierte Fahrzeuggeschwindigkeit zwischen Sekunde 1726 und Sekunde 1742 ist dann mit folgender Gleichung zu berechnen:
![]()
für i = 1726 bis 1742.
8.2.3. Miniaturisierungsverfahren für Fahrzeuge der Klasse 318
Abbildung A1/16 zeigt biespielhaft eine miniaturisierte Phase sehr hoher Geschwindigkeit im WLTC-Zyklus für Fahrzeuge der Klasse 3.
Abbildung A1/16 Miniaturisierte Phase sehr hoher Geschwindigkeit im WLTC-Zyklus für Fahrzeuge der Klasse 3
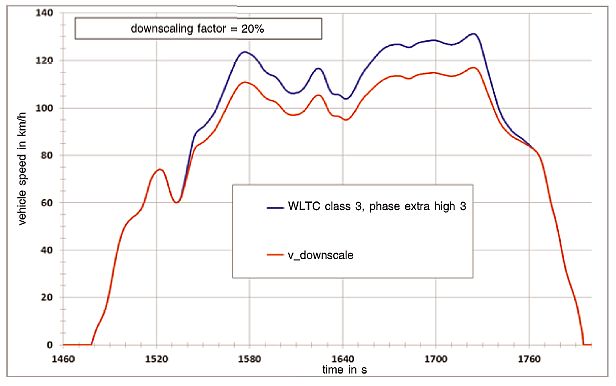
Im Zyklus der Klasse 3 erfolgt die Miniaturisierung im Zeitraum zwischen Sekunde 1533 und Sekunde 1762. In diesem Zeitraum ist die Beschleunigung für den ursprünglichen Zyklus mit folgender Gleichung zu berechnen:
![]()
Dabei ist:
vi die Fahrzeuggeschwindigkeit in km/h
i die Zeit zwischen Sekunde 1533 und Sekunde 1762
Die Miniaturisierung muss zuerst im Zeitraum zwischen Sekunde 1533 und Sekunde 1724 erfolgen. Sekunde 1724 ist der Zeitpunkt, an dem die Höchstgeschwindigkeit der Phase sehr hoher Geschwindigkeit erreicht ist. Die miniaturisierte Geschwindigkeitskurve ist dann mit folgender Gleichung zu berechnen:
![]()

Um bei Sekunde 1763 die ursprüngliche Fahrzeuggeschwindigkeit zu erhalten, ist für die Verzögerung ein Korrekturfaktor mit folgender Gleichung zu berechnen:
fcorr_dec = (vdsc1724 - 82,6) / (vorig_1724 - 82,6)
dabei ist 82,6 km/h die ursprüngliche Fahrzeuggeschwindigkeit bei Sekunde 1763.
Die miniaturisierte Fahrzeuggeschwindigkeit zwischen Sekunde 1725 und Sekunde 1762 ist dann mit folgender Gleichung zu berechnen:
![]()
für i = 1725 bis 1762.
8.3. Bestimmung des Miniaturisierungsfaktors18
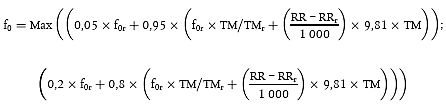
Der Miniaturisierungsfaktor fdsc, ist eine Funktion des Verhältnisses rmax zwischen der maximal erforderlichen Leistung der Zyklusphasen, in denen die Miniaturisierung anzuwenden ist, und der Nennleistung des Fahrzeugs Prated.
Die maximal erforderliche Leistung Preq,max,i (in kW) bezieht sich auf eine spezifische Zeit i und die entsprechende Fahrzeuggeschwindigkeit vi dir Zykluskurve und wird mit folgender Gleichung berechnet:

Dabei ist/sind:
| f0, f1, f2 | die anzuwendenden Fahrwiderstandskoeffizienten N, N/(km/h) und N/(km/h)2 |
| TM | TM die anzuwendende Prüfmasse in kg |
| vi | die Geschwindigkeit zur Zeit i in km/h |
| ai | die Beschleunigung zur Zeit i in km/h2. |
Die Zykluszeit i, zu der die Höchstleistung oder Leistungswerte nahe an der Höchstleistung erforderlich ist/sind: Sekunde 764 für den Zyklus für Klasse 1, Sekunde 1.574 für den Zyklus für Klasse 2 und Sekunde 1.566 für den Zyklus für Klasse 3.
Die entsprechenden Werte der Fahrzeugeschwindigkeit vi, und die Beschleunigungswerte ai, sind:
vi = 61,4 km/h, ai = 0,22 m/s2 für Klasse 1
vi = 109,9 km/h, ai = 0,36 m/s2 für Klasse 2
vi = 111,9 km/h, ai = 0,50 m/s2 für Klasse 3.
rmax ist mit folgender Gleichung zu berechnen:
rmax = Preq,max,i / Prated
Der Miniaturisierungsfaktor fdsc, ist mit folgenden Gleichungen zu berechnen:
wenn rmax < r0 dann fdsc = 0
und es erfolgt keine Miniaturisierung.
Wenn rmax ≥ r0 dann fdsc = a1 × rmax + b1
Es gelten folgende Berechnungsparameter und -koeffizienten r0, a1 und b1,:
Klasse 1 r0 = 0,978, a1 = 0,680, b1 = - 0,665
Klasse 2 r0 = 0,866, a1 = 0,606, b1 = - 0,525.
Klasse 3 r0 = 0,867, a1 = 0,588, b1 = - 0,510.
Der sich daraus ergebende Miniaturisierungsfaktor fdsc wird auf 3 Dezimalstellen gerundet und wird nur angewendet, wenn er 0,010 übersteigt.
Die folgenden Daten sind in allen einschlägigen Prüfberichten zu berücksichtigen:
Die Strecke wird für die gesamte Zykluskurve als die Summe von vi in km/h, geteilt durch 3,6 berechnet.
8.4. Zusätzliche Anforderungen
Bei unterschiedlichen Fahrzeugkonfigurationen hinsichtlich Prüfmasse und Fahrwiderstandskoeffizienten ist die Miniaturisierung individuell anzuwenden.
Ist die Höchstgeschwindigkeit des Fahrzeugs nach der Miniaturisierung geringer als die Höchstgeschwindigkeit des Zyklus, so ist das in Absatz 9 dieses Unteranhangs beschriebene Verfahren mit dem anwendbaren Zyklus durchzuführen.
Kann das Fahrzeug nicht der Geschwindigkeitskurve des anwendbaren Zyklus innerhalb der Toleranz bei Geschwindigkeiten folgen, die geringer als seine Höchstgeschwindigkeit sind, so ist es in diesen Zeiträumen mit voll betätigter Beschleunigungseinrichtung zu fahren. Während solcher Betriebsphasen ist die Nichteinhaltung der Geschwindigkeitskurve zulässig.
9. Zyklusänderungen für Fahrzeuge mit einer Höchstgeschwindigkeit, die geringer ist als die in den vorstehenden Absätzen dieses Unteranhangs genannte Höchstgeschwindigkeit des Zyklus
9.1. Allgemeine Bemerkungen18
Dieser Absatz gilt für Fahrzeuge, die technisch in der Lage sind, der Geschwindigkeitskurve des in Absatz 1 dieses Unteranhangs genannten anwendbaren Zyklus (Basiszyklus) bei Geschwindigkeiten zu folgen, die geringer sind als ihre Höchstgeschwindigkeit, deren Höchstgeschwindigkeit jedoch aus anderen Gründen auf einen Wert begrenzt ist, der geringer ist als die Höchstgeschwindigkeit des Basiszyklus. Dieser anwendbare Zyklus wird im Folgenden als 'Basiszyklus' bezeichnet und dient zur Bestimmung des Zyklus mit begrenzter Geschwindigkeit.
In den Fällen, in denen eine Miniaturisierung gemäß Absatz 8.2 angewendet wird, ist der miniaturisierte Zyklus als Basiszyklus zu verwenden.
Die Höchstgeschwindigkeit des Basiszyklus wird im Folgenden als vmax,cycle bezeichnet.
Die Höchstgeschwindigkeit eines solchen Fahrzeugs wird im Folgenden als 'begrenzte Geschwindigkeit' vcap bezeichnet.
Wird vcap auf ein Fahrzeug der Klasse 3b gemäß der Definition in Absatz 3.3.2 angewendet, so ist der Zyklus für die Klasse 3b als Basiszyklus zu verwenden. Dies gilt auch, wenn vcap niedriger als 120 km/h ist.
In den Fällen, in denen vcap angewendet wird, ist der Basiszyklus gemäß Absatz 9.2 zu ändern, um für den Zyklus mit begrenzter Geschwindigkeit dieselbe Zyklusstrecke wie für den Basiszyklus zu erhalten.
9.2. Berechnungsschritte
9.2.1. Bestimmung der Differenz der Strecke pro Zyklusphase
Ein Zwischenzyklus mit begrenzter Geschwndigkeit ist abzuleiten, indem alle Werte der Fahrzeuggeschwindigkeiten vi (wobei vi > vcap) durch vcap.ersetzt werden.
9.2.1.1 Ist vcap < vmax,medium, so sind die Strecken der Phasen mit mittlerer Geschwindigkeit im Falle des Basiszyklus dbase,medium und des Zwischenzyklus mit begrenzter Geschwindigkeit dcap,medium mit der folgenden Gleichung für beide Zyklen zu berechnen:
![]()
Dabei ist:
vmax,medium die Fahrzeughöchstgeschwindigkeit der Phase mit mittlerer Geschwindigkeit gemäß Tabelle A1/2 für den Zyklus der Klasse 1, gemäß Tabelle A1/4 für den Zyklus der Klasse 2, gemäß Tabelle A1/8 für den Zyklus der Klasse 3a und gemäß Tabelle A1/9 für den Zyklus der Klasse 3b.
9.2.1.2. Ist vcap < vmax,high, so sind die Strecken der Phasen mit hoher Geschwindigkeit im Falle des Basiszyklus dbase,high und des Zwischenzyklus mit begrenzter Geschwindigkeit dcap,high mit der folgenden Gleichung für beide Zyklen zu berechnen:
![]()
vmax,high die Fahrzeughöchstgeschwindigkeit der Phase mit hoher Geschwindigkeit gemäß Tabelle A1/5 für den Zyklus der Klasse 2, gemäß Tabelle A1/10 für den Zyklus der Klasse 3a und gemäß Tabelle A1/11 für den Zyklus der Klasse 3b.
9.2.1.3 Die Strecken der Phase mit sehr hoher Geschwindigkeit im Falle des Basiszyklus dbase,exhigh und des Zwischenzyklus mit begrenzter Geschwindigkeit dcap,exhigh sind für die Phase mit sehr hoher Geschwindigkeit in beiden Zyklen mit der folgenden Gleichung zu berechnen:
![]()
9.2.2. Bestimmung der dem Zwischenzyklus mit begrenzter Geschwindigkeit hinzuzufügenden Zeiträume zum Ausgleich von Streckendifferenzen18
Um eine Streckendifferenz zwischen dem Basiszyklus und dem Zwischenzyklus mit begrenzter Geschwindigkeit auszugleichen, sind Letzterem, gemäß der Beschreibung in den Absätzen 9.2.2.1 bis 9.2.2.3 entsprechende Zeiträume (wobei gilt: vi = vcap) hinzuzufügen.
9.2.2.1. Zusätzlicher Zeitraum für die Phase mit mittlerer Geschwindigkeit
Ist vcap < vmax,medium, so ist der zusätzliche Zeitraum, der im Zwischenzyklus mit begrenzter Geschwindigkeit der Phase mit mittlerer Geschwindigkeit hinzugefügt wird, mit der folgenden Gleichung zu berechnen:
| (dbase,medium - dcap,medium) | ||
| Δtmedium = | × 3,6 | |
| vcap |
Die Anzahl der Zeitabschnitte nadd,medium (wobei vi = vcap), die im Zwischenzyklus mit begrenzter Geschwindigkeit der Phase mit mittlerer Geschwindigkeit hinzugefügt wird, entspricht dem auf die nächste ganze Zahl gerundeten Wert von Δtmedium, (z.B. ist 1,4 auf 1 abzurunden und 1,5 auf 2 aufzurunden).
9.2.2.2. Zusätzlicher Zeitraum für die Phase mit hoher Geschwindigkeit
Ist vcap < vmax high, so ist der zusätzliche Zeitraum, der im Zwischenzyklus mit begrenzter Geschwindigkeit den Phasen mit hoher Geschwindigkeit hinzugefügt wird, mit der folgenden Gleichung zu berechnen:
| (dbase,high - dcap,high) | ||
| Δthigh = | × 3,6 | |
| Vcap |
Die Anzahl der Zeitabschnitte nadd,high (wobei vi = vcap), die im Zwischenzyklus mit begrenzter Geschwindigkeit der Phase mit hoher Geschwindigkeit hinzugefügt wird, entspricht dem auf die nächste ganze Zahl gerundeten Wert von Δthigh.
9.2.2.3 Der zusätzliche Zeitraum, der im Zwischenzyklus mit begrenzter Geschwindigkeit der Phase mit sehr hoher Geschwindigkeit hinzugefügt wird, ist mit der folgenden Gleichung zu berechnen:
| (dbase,exhigh - dcap,exhigh) | ||
| Δtexhigh = | × 3,6 | |
| vcap |
Die Anzahl der Zeitabschnitte nadd,exhigh (wobei vi = vcap), die im Zwischenzyklus mit begrenzter Geschwindigkeit der Phase mit sehr hoher Geschwindigkeit hinzugefügt wird, entspricht dem auf die nächste ganze Zahl gerundeten Wert von Δtexhigh.
9.2.3. Aufbau des letzten Zyklus mit begrenzter Geschwindigkeit
9.2.3.1 Zyklus für Klasse 118
Der erste Teil des letzten Zyklus mit begrenzter Geschwindigkeit besteht aus der Fahrzeuggeschwindigkeitskurve des Zwischenzyklus mit begrenzter Geschwindigkeit bis zum letzten Abschnitt in der Phase mit mittlerer Geschwindigkeit, wobei v = vcap ist. Die Zeit dieses Abschnitts wird im Folgenden als tmedium bezeichnet.
Dann wird die Anzahl nadd,medium an Abschnitten hinzugefügt, wobei vi = vcap, so dass die Zeit des letzten Abschnitts gleich (tmedium + nadd,medium) ist.
Daraufhin ist der restliche Teil der Phase mit mittlerer Geschwindigkeit im Zwischenzyklus mit begrenzter Geschwindigkeit, der mit demselben Teil des Basiszyklus identisch ist, hinzuzufügen, damit die Zeit des letzten Abschnitts (1022 + nadd,medium) beträgt.
9.2.3.2 Zyklen der Klasse 2 und der Klasse 318
9.2.3.2.1 vcap < vmax, medium
Der erste Teil des letzten Zyklus mit begrenzter Geschwindigkeit besteht aus der Fahrzeuggeschwindigkeitskurve des Zwischenzyklus mit begrenzter Geschwindigkeit bis zum letzten Abschnitt in der Phase mit mittlerer Geschwindigkeit, wobei v = vcap. Die Zeit dieses Abschnitts wird im Folgenden tmedium.bezeichnet.
Dann wird die Anzahl nadd,medium an Abschnitten hinzugefügt, wobei vi = vcap, so dass die Zeit des letzten Abschnitts gleich (tmedium + nadd,medium) ist.
Daraufhin ist der restliche Teil der Phase mit mittlerer Geschwindigkeit im Zwischenzyklus mit begrenzter Geschwindigkeit, der mit demselben Teil des Basiszyklus identisch ist, hinzuzufügen, damit die Zeit des letzten Abschnitts (1022 + nadd,medium) beträgt.
Der nächste Schritt besteht darin, den ersten Teil der Phase mit hoher Geschwindigkeit im Zwischenzyklus mit begrenzter Geschwindigkeit bis zum letzten Abschnitt in der Phase mit hoher Geschwindigkeit hinzuzufügen, wobei v = vcap. Die Zeit dieses Abschnitts im Zwischenzyklus mit begrenzter Geschwindigkeit wird im Folgenden als thigh bezeichnet, so dass die Zeit dieses Abschnitts im letzten Zyklus mit begrenzter Geschwindigkeit gleich (thigh + nadd,medium) ist.
Dann wird die Anzahl nadd,high an Abschnitten hinzugefügt, so dass die Zeit des letzten Abschnitts gleich (thigh + nadd,medium + nadd,high) ist.
Daraufhin ist der restliche Teil der Phase mit hoher Geschwindigkeit im Zwischenzyklus mit begrenzter Geschwindigkeit, der mit demselben Teil des Basiszyklus identisch ist, hinzuzufügen, damit die Zeit des letzten Abschnitts gleich (1477 + nadd,medium + nadd,high) ist.
Der nächste Schritt besteht darin, den ersten Teil der Phase mit sehr hoher Geschwindigkeit im Zwischenzyklus mit begrenzter Geschwindigkeit bis zum letzten Abschnitt in der Phase mit sehr hoher Geschwindigkeit hinzuzufügen, wobei v = vcap. Die Zeit dieses Abschnitts im Zwischenzyklus mit begrenzter Geschwindigkeit wird im Folgenden als texhigh bezeichnet, so dass die Zeit dieses Abschnitts im letzten Zyklus mit begrenzter Geschwindigkeit gleich (texhigh + nadd,medium + nadd,high) ist.
Dann wird die Anzahl nadd,exhigh an Abschnitten hinzugefügt, so dass die Zeit des letzten Abschnitts gleich (texhigh + nadd,medium + nadd,high + nadd,exhigh) ist.
Daraufhin ist der restliche Teil der Phase mit sehr hoher Geschwindigkeit im Zwischenzyklus mit begrenzter Geschwindigkeit, der mit demselben Teil des Basiszyklus identisch ist, hinzuzufügen, damit die Zeit des letzten Abschnitts gleich (1800 + nadd,medium + nadd,high + nadd,exhigh) ist.
Die Länge des letzten Zyklus mit begrenzter Geschwindigkeit ist dieselbe wie die Länge des Basiszyklus, abgesehen von Unterschieden aufgrund der Auf- bzw. Abrundung für nadd,medium, nadd,high und nadd,exhigh.
9.2.3.2.2 vmax, medium ≤ vcap < vmax, high
Der erste Teil des letzten Zyklus mit begrenzter Geschwindigkeit besteht aus der Fahrzeuggeschwindigkeitskurve des Zwischenzyklus mit begrenzter Geschwindigkeit bis zum letzten Abschnitt in der Phase mit hoher Geschwindigkeit, wobei v = vcap. Die Zeit dieses Abschnitts wird im Folgenden als thigh bezeichnet.
Dann wird die Anzahl nadd,high an Abschnitten hinzugefügt, so dass die Zeit des letzten Abschnitts gleich (thigh + nadd,high) ist.
Daraufhin ist der restliche Teil der Phase mit hoher Geschwindigkeit im Zwischenzyklus mit begrenzter Geschwindigkeit, der mit demselben Teil des Basiszyklus identisch ist, hinzuzufügen, damit die Zeit des letzten Abschnitts (1477 + nadd,high) beträgt.
Der nächste Schritt besteht darin, den ersten Teil der Phase mit sehr hoher Geschwindigkeit im Zwischenzyklus mit begrenzter Geschwindigkeit bis zum letzten Abschnitt in der Phase mit sehr hoher Geschwindigkeit hinzuzufügen, wobei v = vcap. Die Zeit dieses Abschnitts im Zwischenzyklus mit begrenzter Geschwindigkeit wird im Folgenden als texhigh bezeichnet, so dass die Zeit dieses Abschnitts im letzten Zyklus mit begrenzter Geschwindigkeit gleich (texhigh + nadd,high) ist.
Dann wird die Anzahl nadd,exhigh an Abschnitten (wobei vi = vcap) hinzugefügt, so dass die Zeit des letzten Abschnitts gleich (texhigh + nadd,high + nadd,exhigh) ist.
Daraufhin ist der restliche Teil der Phase mit sehr hoher Geschwindigkeit im Zwischenzyklus mit begrenzter Geschwindigkeit, der mit demselben Teil des Basiszyklus identisch ist, hinzuzufügen, damit die Zeit des letzten Abschnitts gleich (1800 + nadd,high + nadd,exhigh) ist.
Die Länge des letzten Zyklus mit begrenzter Geschwindigkeit ist dieselbe wie die Länge des Basiszyklus, abgesehen von Unterschieden aufgrund der Auf- bzw. Abrundung für nadd,high und nadd,exhigh.
9.2.3.2.3 vmax, high ≤ vcap < vmax, exhigh
Der erste Teil des letzten Zyklus mit begrenzter Geschwindigkeit besteht aus der Fahrzeuggeschwindigkeitskurve des Zwischenzyklus mit begrenzter Geschwindigkeit bis zum letzten Abschnitt in der Phase mit sehr hoher Geschwindigkeit, wobei v = vcap. Die Zeit dieses Abschnitts wird im Folgenden als texhigh bezeichnet.
Dann wird die Anzahl nadd,exhigh an Abschnitten (wobei vi = vcap) hinzugefügt, so dass die Zeit des letzten Abschnitts gleich (texhigh + nadd,exhigh) ist.
Daraufhin ist der restliche Teil der Phase mit sehr hoher Geschwindigkeit im Zwischenzyklus mit begrenzter Geschwindigkeit, der mit demselben Teil des Basiszyklus identisch ist, hinzuzufügen, damit die Zeit des letzten Abschnitts gleich (1800 + nadd,exhigh) ist.
Die Länge des letzten Zyklus mit begrenzter Geschwindigkeit ist dieselbe wie die Länge des Basiszyklus, abgesehen von Unterschieden aufgrund der Auf- bzw. Abrundung für nadd,exhigh.
10. Verteilung der Zyklen auf die Fahrzeuge18
10.1. Ein Fahrzeug einer bestimmten Klasse ist im Zyklus der gleichen Klasse zu prüfen, d. h., Fahrzeuge der Klasse 1 im Zyklus der Klasse 1, Fahrzeuge der Klasse 2 im Zyklus der Klasse 2, Fahrzeuge der Klasse 3a im Zyklus der Klasse 3a und Fahrzeuge der Klasse 3b im Zyklus der Klasse 3b. Jedoch kann ein Fahrzeug auf Antrag des Herstellers und mit Zustimmung der Genehmigungsbehörde in einer nummerisch höheren Zyklusklasse geprüft werden; z.B. kann ein Fahrzeug der Klasse 2 in einem Zyklus der Klasse 3 geprüft werden. In diesem Fall sind die Unterschiede zwischen den Klassen 3a und 3b zu beachten und der Zyklus kann gemäß den Absätzen 8 bis 8.4 miniaturisiert werden.
| Gangwahl und Bestimmung des Schaltpunkts bei Fahrzeugen mit Handschaltung | Unteranhang 218 |
1. Allgemeiner Ansatz
1.1. Die in diesem Unteranhang beschriebenen Schaltverfahren gelten für Fahrzeuge mit Handschaltgetriebe.
1.2. Die vorgeschriebenen Gänge und Schaltpunkte basieren auf dem Gleichgewicht zwischen der zur Überwindung des Fahrwiderstands erforderlichen Leistung und Beschleunigung und der vom Motor in allen möglichen Gängen in einer spezifischen Zyklusphase gelieferten Leistung.
1.3. Die Berechnung zur Bestimmung der zu verwendenden Gänge basiert auf den Motordrehzahlen und den Leistungskurven bei Volllast gegenüber der Motordrehzahl.
1.4. Bei Fahrzeugen mit Dual-Range-Getriebe (niedrig und hoch) ist nur der für den normalen Straßenbetrieb ausgelegte Bereich für die Bestimmung der zu verwendenden Gänge zu berücksichtigen.
1.5. Die Vorschriften für den Betrieb der Kupplung gelten nicht, wenn die Kupplung automatisch, ohne Aktivierung oder Deaktivierung durch den Fahrer, betrieben wird.
1.6. Dieser Unteranhang gilt nicht für Fahrzeuge, die gemäß Unteranhang 8 geprüft werden.
2. Erforderliche Daten und Vorberechnungen
Folgende Daten sind erforderlich und folgende Berechnungen durchzuführen, um die zu verwendenden Gänge zu bestimmen, wenn das Fahrzeug auf einem Rollenprüfstand gefahren wird.
nidle ist über einen Zeitraum von mindestens einer Minute und einer Erfassungsfrequenz von mindestens 1 Hz zu messen, wobei sich der Motor in einem warmen Betriebszustand befinden, der Schalthebel in der Neutralstellung und die Kupplung eingerückt sein muss. Die Bedingungen in Bezug auf Temperatur, periphere Vorrichtungen, Zusatzeinrichtungen usw. entsprechen denen von Prüfung Typ 1 gemäß Unteranhang 6.
Der in diesem Unteranhang zu verwendende Wert ist der arithmetische, auf den nächstgelegenen Wert von 10 min-1 gerundete oder gekürzte Mittelwert über den Messzeitraum hinweg.
Die Vorwärtsgänge im Getriebebereich, der für den normalen Straßenbetrieb ausgelegt ist, sind in absteigender Reihenfolge des Verhältnisses zwischen Motordrehzahl in min-1 und Fahrzeuggeschwindigkeit in km/h zu nummerieren. Gang 1 ist der Gang mit dem größten Verhältnis, Gang ng ist der Gang mit dem niedrigsten Verhältnis."ng" gibt die Anzahl der Vorwärtsgänge an.
nmax1 = n95_high, die Höchstmotordrehzahl, bei der 95 % der Nennleistung erreicht sind (in min-1)
Sollte n95_high nicht bestimmt werden können, weil die Motordrehzahl für alle Gänge auf einen geringeren Wert nlim begrenzt ist und die zugehörige Volllastleistung bei über 95 % der Nennleistung liegt, ist n95_high auf nlim zu setzen.
nmax2 = (n/v)(ngmax) × vmax,cycle
nmax3 = (n/v)(ngmax) × vmax,vehicle
Dabei gilt:
| ngvmax | ist in Absatz 2 i definiert |
| vmax,cycle | ist die Höchstgeschwindigkeit der Fahrzeuggeschwindigkeitskurve gemäß Unteranhang 1 (in km/h) |
| vmax,vehicle | ist die Höchstgeschwindigkeit des Fahrzeugs gemäß Absatz 2 i (in km/h) |
| (n/v)(ngvmax) | ist das Verhältnis, das ermittelt wird, wenn die Motordrehzahl n durch die Fahrzeuggeschwindigkeit v für den Gang ngvmax geteilt wird (in min-1/(km/h)) |
| nmax | ist der Höchstwert für nmax1, nmax2 und nmax3 (in min-1) |
Die Leistungskurve muss aus einer ausreichenden Anzahl an Datensätzen (n, Pwot) bestehen, sodass die Berechnung von Zwischenpunkten zwischen aufeinanderfolgenden Datensätzen mittels einer linearen Interpolation durchgeführt werden kann. Die Abweichung der linearen Interpolation von der Leistungskurve bei Volllast gemäß Anhang XX darf 2 % nicht übersteigen. Erster Datensatz: nmin_drive_set (siehe Nummer (k)(3)) oder niedriger. Letzter Datensatz: nmax oder höhere Motordrehzahl. Der Abstand zwischen den Datensätzen muss nicht gleich sein, aber alle Datensätze müssen gemeldet werden.
Die Datensätze und die Werte Prated sowie nrated müssen der Leistungskurve gemäß Herstellerangaben entnommen werden.
Die Leistung bei Volllast im Falle von Motordrehzahlen, die nicht durch Anhang XX abgedeckt sind, ist gemäß der in Anhang XX beschriebenen Methode zu bestimmen.
ngvmax ist der Gang, in dem die Fahrzeughöchstgeschwindigkeit erreicht wird; er wird folgendermaßen bestimmt:
Wenn vmax(ng) ≥ vmax(ng - 1) und vmax(ng - 1) ≥ vmax(ng - 2), dann:
ngvmax = ng und vmax = vmax(ng).
Wenn vmax(ng) < vmax(ng - 1) und vmax(ng - 1) ≥ vmax(ng - 2), dann:
ngvmax = ng - 1 und vmax = vmax(ng - 1),
sonst ngvmax = ng - 2 und vmax = vmax(ng - 2).
Dabei gilt:
| vmax(ng) | ist die Fahrzeuggeschwindigkeit, bei der die erforderliche Leistung auf der Straße dieselbe ist wie die zur Verfügung stehende Leistung Pwot im Gang ng (siehe Abbildung A2/1a). |
| vmax(ng - 1) | ist die Fahrzeuggeschwindigkeit, bei der die erforderliche Leistung auf der Straße dieselbe ist wie die zur Verfügung stehende Leistung Pwot im nächstniedrigeren Gang (Gang ng - 1). Siehe Abbildung A2/1b. |
| vmax(ng - 2) | ist die Fahrzeuggeschwindigkeit, bei der die erforderliche Leistung auf der Straße dieselbe ist wie die zur Verfügung stehende Leistung Pwot im Gang ng - 2. |
Zur Bestimmung von vmax und ngmax sind auf eine Dezimalstelle gerundete Fahrzeuggeschwindigkeitswerte zu verwenden.
Die erforderliche Leistung auf der Straße in kW wird mit folgender Gleichung berechnet:
| f0 × v + f1 × v2 + f2 × v3 | |
| Prequired = | |
| 3.600 |
Dabei gilt:
v ist die oben angegebene Fahrzeuggeschwindigkeit (in km/h)
Die bei der Fahrzeuggeschwindigkeit vmax im Gang ng, ng - 1 oder ng - 2 zur Verfügung stehende Leistung Pwot(n) kann anhand der Leistungskurve bei Volllast mit folgenden Gleichungen bestimmt werden:
nng = (n/v)ng × vmax(ng)
nng-1 = (n/v)ng-1 × vmax(ng - 1)
nng-2 = (n/v)ng-2 × vmax(ng - 2)
und indem die Leistungswerte der Leistungskurve bei Volllast um 10 % verringert werden.
Erforderlichenfalls ist die vorstehend beschriebene Methode auf noch niedrigere Gänge auszuweiten, d. h. ng - 3, ng - 4 usw.
Falls die Höchstmotordrehzahl zur Begrenzung der Fahrzeughöchstgeschwindigkeit auf den Wert nlim gedrosselt wird, der niedriger ist als die Motordrehzahl am Schnittpunkt der Leistungskurve bei Volllast und der Kurve für die zur Verfügung stehende Leistung, dann gilt:
ngvmax = ngmax und vmax = nlim/(n/v)(ngmax).
Abbildung A2/1a Beispiel, in dem ngmax der höchste Gang ist
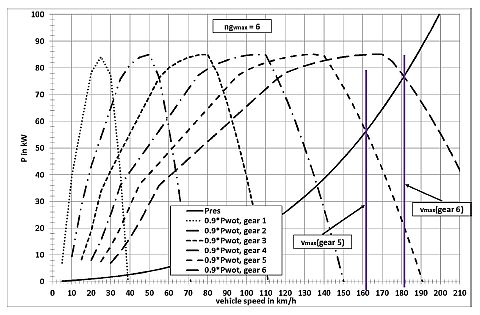
Abbildung A2/1b Beispiel, in dem ngmax der zweithöchste Gang ist

Gang 1 kann auf Antrag des Herstellers ausgeschlossen werden, wenn alle folgenden Bedingungen erfüllt sind:
mt = mr0 + 25 kg + (MC - mr0 - 25 kg) × 0,28
(Der Faktor 0,28 in der vorstehenden Gleichung ist bei Fahrzeugen der Klasse N mit einer Bruttofahrzeugmasse von bis zu 3,5 Tonnen zu verwenden, bei Fahrzeugen der Klasse M ist stattdessen der Faktor 0,15 zu verwenden).
Dabei gilt:
| vmax | ist die Fahrzeughöchstgeschwindigkeit gemäß Angaben in Absatz 2. (i). Für die unter (3) und (4) genannten Bedingungen darf ausschließlich der Wert vmax am Schnittpunkt der Kurve für die erforderliche Leistung auf der Straße und der Kurve für die zur Verfügung stehende Leistung des jeweiligen Gangs verwendet werden. Ein vmax-Wert, der sich aus einer Drosselung der Motordrehzahl ergibt, aufgrund derer ein solcher Schnittpunkt der beiden Kurven verhindert wird, darf nicht verwendet werden. |
| (n/v)(ngvmax) | ist das Verhältnis, das ermittelt wird, wenn die Motordrehzahl n durch die Fahrzeuggeschwindigkeit v für den Gang ngvmax geteilt wird (in min-1/(km/h)) |
| mr0 | ist die Masse in fahrbereitem Zustand (in kg) |
| MC | ist die Bruttozugmasse (Bruttofahrzeugmasse + maximale Masse des Anhängers) (in kg) |
In diesem Fall darf Gang 1 nicht verwendet werden, wenn der Zyklus auf einem Rollenprüfstand gefahren wird, und die Gänge sind neu zu nummerieren, wobei mit dem zweiten Gang als Gang 1 begonnen wird.
nmin_drive ist die Mindestmotordrehzahl, wenn das Fahrzeug in Bewegung ist (in min-1)
nmin_drive = 1,15 × nidle
nmin_drive = nidle
nmin_drive = 0,9 × nidle
nmin_drive = nidle + 0,125 × (nrated - nidle)
Dieser Wert erhält die Bezeichnung nmin_drive_set.
Die Endergebnisse für nmin_drive sind auf die nächste ganzstellige Zahl zu runden. Beispiel: 1.199,5 wird zu 1.200 und 1.199,4 wird zu 1.199.
Sofern vom Hersteller beantragt, können für ngear > 2 Werte größer als nmin_drive_set verwendet werden. In diesem Fall kann der Hersteller einen Wert für Phasen mit Beschleunigung/konstanter Geschwindigkeit (nmin_drive_up) und einen anderen Wert für Verzögerungsphasen (nmin_drive_down) angeben.
Beispiele mit Beschleunigungswerten von mindestens - 0,1389 m/s2 sind den Phasen mit Beschleunigung/konstanter Geschwindigkeit zuzuordnen.
Darüber hinaus kann der Hersteller für einen Anfangszeitraum (tstart_phase) für die Werte nmin_drive und/oder nmin_drive_up für ngear > 2 höhere Werte angeben (nmin_drive_start und/oder nmin_drive_up_start) als vorstehend festgelegt.
Der Anfangszeitraum ist vom Hersteller festzulegen, darf jedoch nicht über die Phase des Zyklus mit niedriger Geschwindigkeit hinausgehen und muss mit einer Haltephase enden, sodass sich während einer kurzen Fahrt nmin_drive nicht ändert.
Alle selbst gewählten Werte für nmin_drive müssen mindestens so hoch sein wie nmin_drive_set, dürfen aber nicht höher sein als 2 × nmin_drive_set.
Alle selbst gewählten Werte für nmin_drive sowie tstart_phase sind in allen einschlägigen Prüfberichten festzuhalten.
Als unterer Grenzwert für die Leistungskurve bei Volllast gemäß Absatz 2 h ist ausschließlich nmin_drive_set zu verwenden.
3. Berechnungen von erforderlicher Leistung, Drehzahlen, zur Verfügung stehender Leistung und des möglichen und zu verwendenden Gangs
3.1. Berechnungen der erforderlichen Leistung
Für jede Sekunde j der Zykluskurve ist die zur Überwindung des Fahrwiderstands und zur Beschleunigung erforderliche Leistung mit folgender Gleichung zu berechnen:

Dabei gilt:
| Prequired,j | ist die erforderliche Leistung bei Sekunde j (in kW) |
| aj | ist die Fahrzeugbeschleunigung bei Sekunde j (in m/s2) und wird wie folgt berechnet: |
| kr | ist ein Faktor, mit dem die Trägheitswiderstände des Antriebsstranges während der Beschleunigung berücksichtigt werden; er ist auf 1,03 festgesetzt. |
| (vj+1) - vj) | ||
| aj = | ; | |
| 3,6 × (tj+1 - tj) |
3.2. Bestimmung der Drehzahlen
Immer wenn vj < 1 km/h, ist davon auszugehen, dass das Fahrzeug stillsteht, und die Motordrehzahl ist auf nidle zu setzen. Der Gangschalthebel ist in die neutrale Stellung zu bringen, wobei die Kupplung eingerückt sein muss, außer eine Sekunde vor dem Beginn einer Beschleunigung aus dem Stillstand, wenn der erste Gang bei ausgerückter Kupplung auszuwählen ist.
Immer wenn vj ≥ 1 km/h der Zykluskurve und jeder Gang i gleich i = 1 bis ngmax, ist die Motordrehzahl ni,j anhand folgender Gleichung zu berechnen:
ni,j = (n/v)i × vj
Die Berechnung ist mit Gleitkommazahlen durchzuführen, die Ergebnisse sind nicht zu runden.
3.3. Auswahl möglicher Gänge in Bezug auf die Motordrehzahl
Die folgenden Gänge können zum Durchfahren der Geschwindigkeitskure mit vj ausgewählt werden:
Wenn aj ≤ 0 und ni,j ≤ nidle, so ist ni,j auf nidle zu setzen und die Kupplung auszurücken.
Wenn aj ≥ 0 und ni,j < max(1,15 × nidle; Mindestmotordrehzahl der Kurve Pwot(n)), so ist ni,j auf das Maximum von 1,15 × nidle oder (n/v)i × vj zu setzen und die Kupplung ist auf "unbestimmt" zu setzen.
"Unbestimmt" erfasst jeden Zustand der Kupplung zwischen ausgerückt und eingerückt, je nach Motoren- und Getriebekonzeption. In diesem Fall kann die tatsächliche Motordrehzahl von der berechneten Motordrehzahl abweichen.
3.4. Berechnung der zur Verfügung stehenden Leistung
Die für jeden möglichen Gang i und jeden Fahrzeuggeschwindigkeitswert der Zykluskurve (vi) zur Verfügung stehende Leistung ist anhand folgender Gleichung zu berechnen:
Pavailable_i,j = Pwot (ni,j) × (1 - (SM + ASM))
Dabei gilt:
| Prated | ist die Nennleistung (in kW) |
| Pwot | ist die bei ni,j bei Volllast zur Verfügung stehende Leistung gemäß der Leistungskurve bei Volllast |
| SM | ist eine Sicherheitsspanne, die sich aus der Differenz zwischen der bei stationärer Volllast zur Verfügung stehenden Leistung gemäß der Leistungskurve und der bei Übergangsbedingungen verfügbaren Leistung ergibt; die SM wird auf 10 % gesetzt |
| ASM | ist eine zusätzliche Leistungssicherheitsspanne, die auf Antrag des Herstellers angewendet werden kann. |
Falls ein solcher Antrag gestellt wurde, muss der Hersteller die ASM-Werte (Pwot-Reduzierung in %) zusammen mit den Datensätzen für Pwot(n) entsprechend dem Beispiel aus Tabelle A2/1 vorlegen. Zwischen aufeinanderfolgenden Datenpunkten ist eine lineare Interpolation zu verwenden. Die ASM wird auf 50 % beschränkt.
Für die Anwendung einer ASM ist die Zustimmung der Genehmigungsbehörde erforderlich.
| n | Pwot | SM Prozent | ASM Prozent | Pavailable |
| min-1 | kW | kW | ||
| 700 | 6,3 | 10,0 | 20,0 | 4,4 |
| 1.000 | 15,7 | 10,0 | 20,0 | 11,0 |
| 1.500 | 32,3 | 10,0 | 15,0 | 24,2 |
| 1.800 | 56,6 | 10,0 | 10,0 | 45,3 |
| 1.900 | 59,7 | 10,0 | 5,0 | 50,8 |
| 2.000 | 62,9 | 10,0 | 0,0 | 56,6 |
| 3.000 | 94,3 | 10,0 | 0,0 | 84,9 |
| 4.000 | 125,7 | 10,0 | 0,0 | 113,2 |
| 5.000 | 157,2 | 10,0 | 0,0 | 141,5 |
| 5.700 | 179,2 | 10,0 | 0,0 | 161,3 |
| 5.800 | 180,1 | 10,0 | 0,0 | 162,1 |
| 6.000 | 174,7 | 10,0 | 0,0 | 157,3 |
| 6.200 | 169,0 | 10,0 | 0,0 | 152,1 |
| 6.400 | 164,3 | 10,0 | 0,0 | 147,8 |
| 6.600 | 156,4 | 10,0 | 0,0 | 140,8 |
3.5. Bestimmung möglicher Gänge, die zu verwenden sind
Die möglichen Gänge, die zu verwenden sind, müssen folgende Bedingungen erfüllen:
Der erste, für jede Sekunde j der Zykluskurve zu verwendende Gang ist der höchstmögliche letzte Gang imax. Bei einem Start aus dem Stillstand ist nur der erste Gang zu verwenden.
Der niedrigstmögliche letzte Gang ist imin.
4. Zusätzliche Anforderungen für Korrekturen und/oder Änderungen an der Verwendung von Gängen
Die erste Gangwahl ist zu prüfen und zu ändern, um zu häufige Gangwechsel zu vermeiden und die Fahrbarkeit und Handhabbarkeit zu gewährleisten.
Eine Beschleunigungsphase ist ein Zeitabschnitt von mehr als 2 Sekunden bei einer Fahrzeuggeschwindigkeit von ≥ 1 km/h und einem monotonen Anstieg der Fahrzeuggeschwindigkeit. Eine Verzögerungsphase ist ein Zeitabschnitt von mehr als 2 Sekunden bei einer Fahrzeuggeschwindigkeit von ≥ 1 km/h und einem monotonen Abnehmen der Fahrzeuggeschwindigkeit.
Korrekturen und/oder Änderungen sind gemäß den folgenden Anforderungen durchzuführen:
Beispiele:
Die Gangabfolge i - 1, i, i - 1 ist wie folgt zu ersetzen:
i - 1, i - 1, i - 1
Die Gangabfolge i - 1, i, i - 2 ist wie folgt zu ersetzen:
i - 1, i - 1, i - 2
Die Gangabfolge i - 2, i, i - 1 ist wie folgt zu ersetzen:
i - 2, i - 1, i - 1.
Gänge, die bei Beschleunigungen bei Fahrzeuggeschwindigkeiten von ≥ 1 km/h verwendet werden, sind für mindestens 2 Sekunden zu verwenden (z.B. ist die Gangabfolge 1, 2, 3, 3, 3, 3, 3 durch 1, 1, 2, 2, 3, 3, 3 zu ersetzen). Diese Anforderung gilt nicht beim Herunterschalten während einer Beschleunigungsphase. Diese Art des Herunterschaltens ist entsprechend Absatz 4 b) zu korrigieren. Während der Beschleunigungsphasen dürfen keine Gänge ausgelassen werden.
Ein Hochschalten über zwei Gänge ist jedoch beim Übergang von einer Beschleunigungsphase zu einer Phase mit konstanter Geschwindigkeit gestattet, wenn die Phase mit konstanter Geschwindigkeit mehr als 5 Sekunden dauert.
Ausgehend vom Ende der Beschleunigungsphase ist durch Rückverfolgung das letzte Auftreten eines 10-Sekunden-Fensters zu ermitteln, das entweder über mindestens 2 aufeinanderfolgende Sekunden oder für mindestens 2 einzelne Sekunden iDS enthält. Die letzte Verwendung von iDS in diesem Fenster bildet das Ende des Korrekturverfahrens. Zwischen Beginn und Ende des Korrekturzeitraums sind alle Erfordernisse für Gänge > iDS zu einem Erfordernis für iDS zu korrigieren.
Vom Ende des Korrekturzeitraums bis zum Ende der Beschleunigungsphase muss jeder Herunterschaltvorgang mit einer Dauer von nur einer Sekunde entfernt werden, wenn dabei jeweils nur ein Gang heruntergeschaltet wurde. Ist das Herunterschalten jedoch über zwei Gänge erfolgt, sind alle Erfordernisse für Gänge ≥ iDS bis zum letzten Auftreten von iDS zu (iDS + 1) zu korrigieren.
Diese letzte Korrektur ist außerdem vom Beginn bis zum Ende der Beschleunigungsphase anzuwenden, falls kein 10-Sekunden-Fensters ermittelt werden konnte, das entweder über mindestens 2 aufeinanderfolgende Sekunden oder für mindestens 2 einzelne Sekunden iDS enthält.
Beispiele:
2, 2, 3, [3, 4, 4, 4, 4,3, 4, 4, 4, 4], 4, 4,3, 4, 4, 4,
dann ist folgende Korrektur für die Verwendung der Gänge vorzunehmen:
2, 2, 3, 3, 3, 3, 3, 3,3, 3, 3, 3, 3, 3, 3,3, 4, 4, 4.
2, 2, 3, [3, 4, 4,3, 4, 4, 4, 4, 4, 4], 4, 4, 4, 4,3, 4,
dann ist folgende Korrektur für die Verwendung der Gänge vorzunehmen:
2, 2, 3, 3, 3, 3,3, 4, 4, 4, 4, 4, 4, 4, 4, 4, 4,4, 4.
2, 2, 3, [3, 4, 4, 4, 4, 4, 4, 4, 4, 4], 4, 4, 4,3,3, 4,
dann ist folgende Korrektur für die Verwendung der Gänge vorzunehmen:
2, 2, 3, 3, 3, 3, 3, 3, 3, 3, 3, 3, 3, 3, 3, 3,3,3, 4.
Die ersten 10-Sekunden-Fenster sind in den obigen Beispielen mit eckigen Klammern gekennzeichnet.
Mit den unterstrichenen Gängen (z.B.3) sind diejenigen Fälle gekennzeichnet, die eine Korrektur des vorhergehenden Gangs nach sich ziehen könnten.
Eine solche Korrektur ist nicht für Gang 1 vorzunehmen.
Beispiele:
i - 1, i - 1, i - 1;
Die Gangabfolge i - 1, i, i - 2 ist wie folgt zu ersetzen:
i - 1, i - 1, i - 2
Die Gangabfolge i - 2, i, i - 1 ist wie folgt zu ersetzen:
i - 2, i - 1, i - 1.
i - 1, i - 1, i - 1, i - 1;
Die Gangabfolge i - 1, i, i, i - 2 ist wie folgt zu ersetzen:
i - 1, i - 1, i - 1, i - 2;
Die Gangabfolge i - 2, i, i, i - 1 ist wie folgt zu ersetzen:
i - 2, i - 1, i - 1, i - 1.
i - 1, i - 1, i - 1, i - 1, i - 1;
Die Gangabfolge i - 1, i, i, i, i - 2 ist wie folgt zu ersetzen:
i - 1, i - 1, i - 1, i - 1, i - 2;
Die Gangabfolge i - 2, i, i, i, i - 1 ist wie folgt zu ersetzen:
i - 2, i - 1, i - 1, i - 1, i - 1.
i - 1, i - 1, i - 1, i - 1, i - 1, i - 1;
Die Gangabfolge i - 1, i, i, i, i, i - 2 ist wie folgt zu ersetzen:
i - 1, i - 1, i - 1, i - 1, i - 1, i - 2;
Die Gangabfolge i - 2, i, i, i, i, i - 1 ist wie folgt zu ersetzen:
i - 2, i - 1, i - 1, i - 1, i - 1, i - 1.
i - 1, i - 1, i - 1, i - 1, i - 1, i - 1, i - 1.
Die Gangabfolge i - 1, i, i, i, i, i, i - 2 ist wie folgt zu ersetzen:
i - 1, i - 1, i - 1, i - 1, i - 1, i - 1, i - 2;
Die Gangabfolge i - 2, i, i, i, i, i, i - 1 ist wie folgt zu ersetzen:
i - 2, i - 1, i - 1, i - 1, i - 1, i - 1, i - 1.
In allen Fällen i bis v muss i - 1 ≥ imin erfüllt sein.
Beispiel:
Wenn vi ≤ vi + 1 und vi + 2 < vi + 1 und Gang i = 4 und Gang (i + 1 = 5) und Gang (i + 2 = 5), dann müssen Gang (i + 1) und Gang (i + 2) auf 4 gesetzt werden, wenn der Gang für die auf die Verzögerungsphase folgende Phase 4 oder niedriger ist. Auch für alle folgenden Zykluskurvenpunkte, bei denen in der Verzögerungsphase Gang 5 verwendet wird, muss der Gang auf 4 gesetzt werden. Handelt es sich bei dem auf die Verzögerungsphase folgenden Gang um Gang 5, muss hochgeschaltet werden.
Erfolgt beim Übergang und bei der ersten Verzögerungsphase ein Hochschalten um 2 Gänge, muss 1 Gang hochgeschaltet werden.
Innerhalb einer Verzögerungsphase darf nicht hochgeschaltet werden.
Gang 2 ist während einer Verzögerungsphase innerhalb einer kurzen Fahrt des Zyklus (nicht am Ende einer kurzen Fahrt) so lange zu verwenden, bis die Motordrehzahl unter (0,9 × nidle) fällt.
Fällt die Motordrehzahl unter nidle, so ist die Kupplung auszurücken.
Bildet die Verzögerungsphase den letzten Teil einer kurzen Fahrt kurz vor einer Haltephase, so ist der zweite Gang so lange zu verwenden, bis die Motordrehzahl unter nidle fällt.
Sollte während einer Verzögerungsphase die Dauer einer Gangabfolge zwischen zwei Gangabfolgen von mindestens 3 Sekunden 2 Sekunden betragen, ist sie in der ersten Sekunde durch Gang 0 und in der zweiten Sekunde durch denjenigen Gang zu ersetzen, der nach dem 2-Sekunden-Zeitraum folgt. Die Kupplung ist in der ersten Sekunde auszurücken.
Beispiel: Die Gangabfolge 5, 4, 4, 2 ist durch 5, 0, 2, 2 zu ersetzen.
Dies ist nur erforderlich, wenn der nach dem 2-Sekunden-Zeitraum folgende Gang > 0 ist.
Folgen mehrere 1 oder 2 Sekunden dauernde Gangabfolgen aufeinander, sind nachstehende Korrekturen vorzunehmen:
Eine Gangabfolge i, i, i, i - 1, i - 1, i - 2 oder i, i, i, i - 1, i - 2, i - 2 ist wie folgt zu ändern: i, i, i, 0, i - 2, i - 2.
Eine Gangabfolge der Art i, i, i, i - 1, i - 2, i - 3 oder i, i, i, i - 2, i - 2, i - 3 oder andere mögliche Kombinationen sind wie folgt zu ändern: i, i, i, 0, i - 3, i - 3.
Diese Änderung ist auch auf Gangabfolgen anzuwenden, bei denen die Beschleunigung in den ersten 2 Sekunden ≥ 0 und in der dritten Sekunde < 0 ist oder bei denen die Beschleunigung in den letzten 2 Sekunden ≥ 0 ist.
Bei außergewöhnlichen Übergangsszenarien ist es möglich, dass aufeinanderfolgende Gangabfolgen mit einer Dauer von 1 oder 2 Sekunden bis zu 7 Sekunden andauern können. In solchen Fällen ist die vorab beschriebene Korrektur durch den im Folgenden beschriebenen zweiten Korrekturlauf zu ergänzen:
Eine Gangabfolge j, 0, i, i, i - 1, k (wobei j > (i + 1) und k ≤ (i - 1)) ist zu j, 0, i - 1, i - 1, i - 1, k zu ändern, wenn Gang (i - 1) bei Sekunde 3 dieser Abfolge eine oder zwei Stufen niedriger ist als imax (eine nach Gang 0).
Ist Gang (i - 1) bei Sekunde 3 dieser Abfolge mehr als zwei Stufen unter imax, ist eine Gangabfolge j, 0, i, i, i - 1, k (wobei j > (i + 1) und k ≤ (i - 1)) wie folgt zu ändern: j, 0, 0, k, k, k.
Eine Gangabfolge j, 0, i, i, i - 2, k (wobei j > (i + 1) und k ≤ (i - 2)) ist zu j, 0, i - 2, i - 2, i - 2, k zu ändern, wenn Gang (i - 2) bei Sekunde 3 dieser Abfolge eine oder zwei Stufen niedriger ist als imax (eine nach Gang 0).
Ist Gang (i - 2) bei Sekunde 3 dieser Abfolge mehr als zwei Stufen unter imax, ist eine Gangabfolge j, 0, i, i, i - 2, k (wobei j > (i + 1) und k ≤ (i - 2)) wie folgt zu ändern: j, 0, 0, k, k, k.
In allen in diesem Unterabsatz genannten Fällen kommt das 1 Sekunde andauernde Ausrücken der Kupplung (Gang 0) zum Einsatz, damit in dieser Sekunde keine zu hohen Motordrehzahlen auftreten. Falls dies keine Rolle spielen sollte und falls vom Hersteller beantragt, darf beim Herunterschalten von bis zu 3 Gängen anstelle von Gang 0 direkt der niedrigere Gang der folgenden Sekunde verwendet werden. Wird von dieser Möglichkeit Gebrauch gemacht, ist dies festzuhalten.
Sollte die Verzögerungsphase den letzten Teil einer kurzen Fahrt kurz vor einer Haltephase bilden und der letzte Gang > 0 vor der Haltephase nur über einen Zeitraum von bis zu 2 Sekunden verwendet werden, so ist stattdessen Gang 0 zu verwenden, der Gangschalthebel in die neutrale Stellung zu bringen und die Kupplung einzurücken.
Beispiele: Eine Gangabfolge 4, 0, 2, 2, 0 in den letzten 5 Sekunden vor einer Haltephase ist durch 4, 0, 0, 0, 0 zu ersetzen. Eine Gangabfolge 4, 3, 3, 0 in den letzten 4 Sekunden vor einer Haltephase ist durch 4, 0, 0, 0 zu ersetzen.
Zurückschalten ist während dieser Verzögerungsphasen nicht erlaubt.
5. Die Absätze 4 a) bis 4 f) sind sequentiell anzuwenden, wobei jedes Mal die gesamte Zykluskurve zu scannen ist. Da Änderungen an den Absätzen 4 a) bis 4 f) neue Abfolgen hinsichtlich der Verwendung der Gänge zur Folge haben können, sind diese neuen Gangabfolgen dreimal zu prüfen und gegebenenfalls zu ändern.
Damit die Richtigkeit der Berechnung bewertet werden kann, ist der durchschnittliche Gang für v ≥ 1 km/h (auf vier Dezimalstellen gerundet) zu berechnen und in alle einschlägigen Prüfberichte aufzunehmen.
| Reserviert | Unteranhang 3 |
| Fahrwiderstand auf der Straße und Einstellung des Rollenprüfstands | Unteranhang 418 |
1. Anwendungsbereich
In diesem Unteranhang wird die Bestimmung des Fahrwiderstands eines Prüffahrzeugs auf der Straße und die Übertragung dieses Fahrwiderstands auf einen Rollenprüfstand beschrieben.
2. Begriffe und Definitionen
2.1. Reserviert
2.2. Geschwindigkeitsbezugspunkte beginnen bei 20 km/h und erfolgen in Schritten von 10 km/h und mit der höchsten Bezugsgeschwindigkeit gemäß folgenden Bestimmungen:
2.3. Unbeschadet anderer Bestimmungen ist gemäß Unteranhang 7 Absatz 5 ein Zyklus-Energiebedarf hinsichtlich der Sollgeschwindigkeitskurve des anzuwendenden Fahrzyklus zu berechnen.
2.4. f0, f1, f2 sind die entsprechend diesem Unteranhang bestimmten Fahrwiderstandskoeffizienten der Fahrwiderstandsgleichung F = f0+ f1 × v + f2 × v2
f0 ist der konstante Fahrwiderstandskoeffizient in N; der Wert ist auf eine Dezimalstelle zu runden;
f1 ist der Fahrwiderstandskoeffizient erster Ordnung in N/(km/h); der Wert ist auf drei Dezimalstellen zu runden;
f2 ist der Fahrwiderstandskoeffizient zweiter Ordnung in N/(km/h)2; der Wert ist auf fünf Dezimalstellen zu runden.
Unbeschadet anderer Bestimmungen sind die Fahrwiderstandskoeffizienten mit einer linearen Regressionsanalyse nach der Methode der Mindestquadrate über den ganzen Bereich der Geschwindigkeitsbezugspunkte zu berechnen.
2.5. Rotierende Masse
2.5.1. Bestimmung von mr
mr ist die gleichwertige effektive Masse aller Räder und Fahrzeugbauteile in kg, die, bei Getriebe in Neutral- Stellung, mit den Rädern auf der Straße rotieren. m r ist mittels eines geeigneten und von der Genehmigungsbehörde genehmigten Verfahrens zu messen oder zu berechnen. Wahlweise kann mr auf 3 % der Summe aus der Masse in fahrbereitem Zustand zuzüglich 25 kg geschätzt werden.
2.5.2. Anwendung der rotierenden Masse auf den Fahrwiderstand (Straße)
Die Ausrollzeiten sind auf die Kräfte zu übertragen und umgekehrt, wobei die anzuwendende Prüfmasse plus mr zu berücksichtigen sind. Dies gilt sowohl für Messungen auf der Straße als auch auf dem Rollenprüfstand.
2.5.3. Anwendung der rotierenden Masse auf die Schwungmasseneinstellung
Wird das Fahrzeug auf einem Prüfstand im 4-Rad-Betrieb geprüft, muss die gleichwertige Schwungmasse des Rollenprüfstands auf die anzuwendende Prüfmasse eingestellt werden.
Ansonsten ist der Wert der gleichwertigen Schwungmasse des Rollenprüfstands auf den Wert der Prüfmasse zuzüglich entweder der gleichwertigen effektiven Masse der Räder, die die Messergebnisse nicht beeinflussen, oder 50 % von mr zu setzen.
2.6. Zusätzliche Massen für das Einstellen der Prüfmasse müssen so aufgebracht werden, dass die Gewichtsverteilung des Fahrzeugs ungefähr derjenigen entspricht wie bei der Masse dieses Fahrzeugs im fahrbereiten Zustand. Bei Fahrzeugen der Klasse N bzw. bei Personenkraftwagen, die sich von der Fahrzeugklasse N ableiten, müssen die zusätzlichen Massen in charakteristischer Weise angeordnet werden und auf Verlangen der Genehmigungsbehörde ihr gegenüber begründet werden. Die Gewichtsverteilung des Fahrzeugs muss in allen einschlägigen Prüfberichten festgehalten und für nachfolgende Prüfungen zur Bestimmung des Fahrwiderstands auf der Straße verwendet werden.
3. Allgemeine Anforderungen18
Der Hersteller ist für die Genauigkeit der Fahrwiderstandskoeffizienten verantwortlich und muss dies für jedes Serienfahrzeug in der Fahrwiderstandsfamilie gewährleisten. Toleranzen in der Bestimmung, der Simulation und den Berechnungsmethoden dürfen nicht verwendet werden, damit der Fahrwiderstand von Serienfahrzeugen nicht unterschätzt wird. Auf Verlangen der Genehmigungsbehörde ist die Genauigkeit der Fahrwiderstandskoeffizienten eines individuellen Fahrzeugs nachzuweisen.
3.1. Gesamtmessgenauigkeit, Präzision, Auflösung und Frequenz18
Die erforderliche Gesamtmessgenauigkeit muss folgende Anforderungen erfüllen:
3.2. Windkanalkriterien
3.2.1. Windgeschwindigkeit
Die Windgeschwindigkeit muss während einer Messung im Mittelpunkt des Prüfbereichs innerhalb von n ± 2 km/h bleiben. Die mögliche Windgeschwindigkeit muss mindestens 140 km/h betragen.
3.2.2. Lufttemperatur
Die Lufttemperatur muss während einer Messung im Mittelpunkt des Prüfbereichs innerhalb von ± 3 °C bleiben. Die Verteilung der Lufttemperatur am Düsenauslass muss innerhalb von ± 3 °C bleiben.
3.2.3. Turbulenzen
Um ein gleichmäßiges Gitternetz mit dreimal drei Rechtecken über dem Düsenauslass zu erhalten, darf die Turbulenzintensität Tu 1 % nicht überschreiten. Siehe Abbildung A4/1.
Abbildung A4/1 Turbulenzintensität
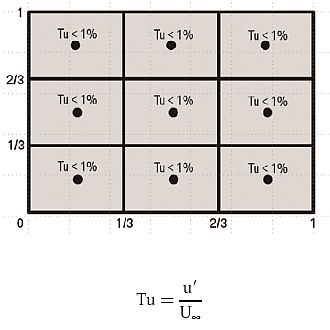
Dabei ist:
Tu die Turbulenzintensität
u' die Fluktuation der Turbulenzgeschwindigkeit in m/s
U∞ die ungestörte Strömungsgeschwindigkeit in m/s
3.2.4. Festes Blockierungsverhältnis
Das Fahrzeugblockierungsverhältnis µsb, das als der Quotient aus der Fläche der Fahrzeugfront und der Fläche des Düsenauslasses ausgedrückt wird, ist nach folgender Gleichung zu berechnen und darf 0,35 nicht übersteigen.
µsb = Af / Anozzle
Dabei ist:
εsb das Fahrzeugblockierungsverhältnis
Af die Fläche der Fahrzeugfront in m2
Anozzle die Fläche des Düsenauslasses in m2
3.2.5. Rotierende Räder18
Damit der aerodynamische Einfluss der Räder richtig bestimmt werden kann, müssen die Räder des Prüffahrzeugs mit einer solchen Geschwindigkeit rotieren, dass die sich daraus ergebende Fahrzeuggeschwindigkeit innerhalb ± 3 km/h der Windgeschwindigkeit liegt.
3.2.6. Laufband18
Um die Strömung unter dem Prüffahrzeug zu simulieren, muss der Windkanal mit einem Laufband ausgerüstet sein, das über die ganze Länge des Fahrzeugs verläuft. Die Geschwindigkeit des Laufbands muss innerhalb ± 3 km/h der Windgeschwindigkeit liegen.
3.2.7. Fluidströmungswinkel18
An neun gleichmäßig verteilten Punkten über dem Düsenbereich darf weder die mittlere quadratische Abweichung des Nickwinkels α noch die des Gierwinkels β (Y-, Z-Ebene) am Düsenauslass 1° überschreiten.
3.2.8. Luftdruck
An neun gleichmäßig verteilten Punkten über dem Düsenauslass muss die Standardabweichung des Gesamtdrucks am Düsenauslass gleich oder kleiner als 0,02 sein.
σ(ΔPt/q) ≤ 0,02
Dabei ist:
σ die Standardabweichung des Druckverhältnisses - (ΔPt/q);
ΔPt die Schwankung des Gesamtdrucks zwischen den Messpunkten in N/m2
q der dynamische Druck N/m2
Die absolute Differenz des Druckkoeffizienten cp über eine Distanz von 3 Metern vor und 3 Metern hinter dem Mittelpunkt der Waage im leeren Prüfabschnitt und in einer Höhe des Mittelpunkts des Düsenauslasses darf nicht um mehr als ± 0,02 abweichen.
|cpx=+3m - cpx=-3m| ≤ 0,02
Dabei ist:
cp der Druckkoeffizient.
3.2.9. Dicke der Grenzschicht
Bei x = 0 (Mittelpunkt der Waage) muss die Windgeschwindigkeit mindestens 99 % der Einströmgeschwindigkeit 30 mm über dem Boden des Windkanals betragen.
δ99(x = 0 m) ≤ 30mm
Dabei ist:
δ99 der Abstand senkrecht zur Straße, wo 99 % der ungestörten Strömungsgeschwindigkeit erreicht werden (Dicke der Grenzschicht).
3.2.10. Rückhalteblockierungsverhältnis
Das Rückhaltesystem darf sich nicht vor dem Fahrzeug befinden. Das relative Blockierungsverhältnis der Fahrzeugfront εrestr aufgrund des Rückhaltesystems darf 0,10 nicht überschreiten.
εrestr = Arestr / Af
Dabei ist:
εrestr das relative Blockierungsverhältnis des Rückhaltesystems
Arestr die Fahrzeugfront des Rückhaltesystems, auf die Düsenvorderseite projiziert, in m2
Af die Fläche der Fahrzeugfront in m2
3.2.11. Messung der Genauigkeit der Waage in der x-Richtung
Die Ungenauigkeit der sich in der x-Richtung ergebenden Kraft darf ± 5 N nicht überschreiten. Die Auflösung der gemessenen Kraft muss innerhalb ± 3 N liegen.
3.2.12. Messpräzision18
Die Präzision der gemessenen Kraft muss innerhalb ± 3 N liegen.
4. Messung des Fahrwiderstands auf der Straße
4.1. Anforderungen für die Straßenprüfung
4.1.1. Atmosphärische Bedingungen für die Straßenprüfung
4.1.1.1. Zulässige Windbedingungen18
Die maximal zulässigen Windbedingungen für die Bestimmung des Fahrwiderstands werden in den Absätzen 4.1.1.1.1 und 4.1.1.1.2 beschrieben.
Zur Feststellung der Anwendbarkeit des zu verwendenden Typs der Anemometrie ist der arithmetische Mittelwert der Windgeschwindigkeit mittels kontinuierlicher Windgeschwindigkeitsmessungen zu bestimmen, indem ein anerkanntes meteorologisches Instrument an einer an der Prüfstrecke liegenden Stelle und in einer sich über dem Fahrbahnniveau befindenden Höhe, wo die repräsentativsten Windbedingungen auftreten, verwendet wird.
Können keine Prüfungen in entgegengesetzter Richtung auf demselben Abschnitt der Prüfstrecke durchgeführt werden (z.B. auf einer ovalen Prüfstrecke mit obligatorischer Fahrtrichtung), so sind die Windgeschwindigkeit und die Richtung auf jedem Teil der Prüfstrecke zu messen. In diesem Fall wird durch den höheren Messwert für die arithmetische durchschnittliche Windgeschwindigkeit die Art der zu verwendenden Anemometrie bestimmt, während durch die niedrigere arithmetische durchschnittliche Windgeschwindigkeit das Kriterium bestimmt wird, nach dem auf eine Windkorrektur verzichtet werden kann.
4.1.1.1.1 Zulässige Windbedingungen bei der Verwendung stationärer Anemometrie
Stationäre Anemometrie ist nur zu verwenden, wenn Windgeschwindigkeiten über einen Zeitraum von 5 Sekunden im Durchschnitt weniger als 5 m/s betragen und die Spitzenwindgeschwindigkeiten in weniger als 2 Sekunden weniger als 8 m/s betragen. Darüber hinaus muss die mittlere Vektorkomponente der Windgeschwindigkeit entlang der Prüfstrecke während jedes gültigen Fahrtenpaars unter 2 m/s liegen. Fahrtenpaare, die die obigen Kriterien nicht erfüllen, sind von der Analyse auszuschließen. Windkorrekturen müssen entsprechend Absatz 4.5.3 berechnet werden. Auf eine Windkorrektur kann verzichtet werden, wenn die niedrigste arithmetische durchschnittliche Windgeschwindigkeit 2 m/s oder weniger beträgt.
4.1.1.1.2 Zulässige Windbedingungen bei der Verwendung von On-Board-Anemometrie
Für Prüfungen mit einem On-Board-Anemometer ist ein in Absatz 4.3.2 beschriebenes Gerät zu verwenden. Die arithmetische durchschnittliche Windgeschwindigkeit während jedes gültigen Fahrtenpaars entlang der Prüfstrecke muss unter 7 m/s liegen, wobei Spitzenwindgeschwindigkeiten in weniger als 2 Sekunden weniger als 10 m/s betragen müssen. Darüber hinaus muss die mittlere Vektorkomponente der Windgeschwindigkeit entlang der Prüfstrecke während jedes gültigen Fahrtenpaars unter 4 m/s liegen. Fahrtenpaare, die die obigen Kriterien nicht erfüllen, sind von der Analyse auszuschließen.
4.1.1.2. Umgebungstemperatur
Die Umgebungstemperatur muss im Bereich von 5 °C bis einschließlich 35 °C liegen.
Beträgt die Differenz zwischen der höchsten und der niedrigsten gemessenen Temperatur während der Ausrollprüfung mehr als 5 °C, so ist die Temperaturkorrektur separat auf jede Fahrt mit dem arithmetischen Durchschnitt der Umgebungstemperatur dieser Fahrt anzuwenden.
In diesem Fall sind die Werte der Fahrwiderstandskoeffizienten (Straße) f0, f1 und f2 zu bestimmen und für jede einzelne Fahrt zu korrigieren. Die endgültigen Werte von f0, f1 and f2 müssen dem arithmetischen Durchschnitt der individuell korrigierten Koeffizienten f0, f1 und f2 entsprechen.
Es steht dem Hersteller frei, Ausrollprüfungen zwischen 1 °C und 5 °C durchzuführen.
4.1.2. Prüfstrecke
Die Straßenoberfläche muss flach, eben, sauber und trocken sein und darf keine Hindernisse oder Windschutzwände aufweisen, die die Messung des Fahrwiderstands beeinträchtigen könnten; ihre Struktur und Zusammensetzung muss repräsentativ für derzeitige städtische und Fernstraßenbeläge sein. Die Längsneigung der Prüfstrecke darf nicht mehr als ± 1 % betragen. Die lokale Neigung zwischen beliebigen, 3 Meter voneinander entfernten Punkten darf nicht mehr als ± 0,5 % von dieser Längsneigung abweichen. Können keine Prüfungen in entgegengesetzten Richtungen auf dem selben Abschnitt der Prüfstrecke durchgeführt werden (z.B. auf einer ovalen Prüfstrecke mit obligatorischer Fahrtrichtung), so muss die Summe der Längsneigungen der parallelen Prüfstreckenabschnitte zwischen 0 und einer Steigung von 0,1 % liegen. Die Wölbung der Prüfstrecke muss 1,5 % betragen.
4.2. Vorbereitung
4.2.1. Prüffahrzeug
Jedes Prüffahrzeug muss mit allen seinen Bauteilen der Produktionsserie entsprechen, andernfalls, wenn das Fahrzeug sich von dem Serienfahrzeug unterscheidet, ist eine vollständige Beschreibung in alle einschlägigen Prüfberichte aufzunehmen.
4.2.1.1. Vorgaben für die Auswahl von Prüffahrzeugen18
4.2.1.1.1. Keine Anwendung der Interpolationsmethode18
Aus der Familie ist ein Prüffahrzeug (Fahrzeug H) mit der Kombination aus Merkmalen auszuwählen, die für den Fahrwiderstand relevant ist (d. h. Masse, Luftwiderstand und Reifenrollwiderstand) und den höchsten Zyklusenergiebedarf verursacht (siehe Absätze 5.6 und 5.7 dieses Anhangs).
Ist der aerodynamische Einfluss der verschiedenen Räder innerhalb einer Interpolationsfamilie nicht bekannt, so muss die Auswahl auf dem größten zu erwartenden Luftwiderstand basieren. Als Orientierungshilfe bei der Auswahl ist zu berücksichtigen, dass der größte Luftwiderstand bei Rädern mit a) der größten Breite, b) dem größten Durchmesser und c) der am weitesten geöffneten Struktur (in dieser Reihenfolge) zu erwarten ist.
Die Vorgabe hinsichtlich der Auswahl der Räder gilt zusätzlich zu der Vorgabe, dass der höchste Zyklusenergiebedarf auszuwählen ist.
4.2.1.1.2. Anwendung einer Interpolationsmethode18 20
Auf Antrag des Herstellers kann eine Interpolationsmethode angewandt werden.
In diesem Fall müssen zwei Prüffahrzeuge aus der Familie ausgewählt werden, die der jeweiligen Familienvorgabe entsprechen.
Prüffahrzeug H muss das Fahrzeug sein, das den höheren und vorzugsweise den höchsten Zyklusenergiebedarf dieser Auswahl verursacht, während Prüffahrzeug L das Fahrzeug sein muss, das den geringeren und vorzugsweise den geringsten Zyklusenergiebedarf dieser Auswahl verursacht.
Alle Teile der Zusatzausrüstung und/oder Karosserieformen, die bei der Anwendung der Interpolationsmethode unberücksichtigt bleiben sollen, müssen an den beiden Prüffahrzeugen H und L insofern gleich sein, als sie aufgrund ihrer für den Fahrwiderstand relevanten Merkmale (d. h. Masse, Luftwiderstand und Reifenrollwiderstand) die höchste Kombination des Zyklusenergiebedarfs verursachen.
Kann ein Fahrzeug mit einem vollständigen Satz standardmäßiger Reifen und Räder und einem vollständigen Satz Winterreifen (gekennzeichnet mit dem Symbol aus dreizackigem Berg und Schneeflocke, "3PMS" oder "Alpine-Symbol") mit oder ohne Räder geliefert werden, gelten die Winterreifen und ihre Räder nicht als Zusatzausrüstung.
Als Orientierungshilfe lässt sich festhalten, dass die folgenden Mindestdifferenzen zwischen den Fahrzeugen H und L für das jeweilige Merkmal gelten sollten, das für den Fahrwiderstand relevant ist:
Um eine hinreichende Differenz zwischen Fahrzeug H und L in Bezug auf ein bestimmtes für den Fahrwiderstand relevantes Merkmal zu erhalten, kann der Hersteller für Fahrzeug H künstlich ungünstigere Werte schaffen, z.B. durch Aufbringen einer größeren Prüfmasse.
4.2.1.2. Vorgaben für Familien18
4.2.1.2.1. Vorgaben für die Anwendung der Interpolationsfamilie ohne Anwendung der Interpolationsmethode
Die Kriterien, die für eine Interpolationsfamilie gelten, sind in Absatz 5.6 dieses Anhangs nachzulesen.
4.2.1.2.2. Folgende Vorgaben gelten für die Anwendung der Interpolationsfamilie bei Anwendung der Interpolationsmethode:
4.2.1.2.3. Vorgaben für die Anwendung der Fahrwiderstandsfamilie
4.2.1.2.3.1. Auf Antrag des Herstellers und bei Erfüllung der Kriterien von Absatz 5.7 dieses Anhangs sind die Werte des Fahrwiderstands für die Fahrzeuge H und L einer Interpolationsfamilie zu berechnen.
4.2.1.2.3.2. Prüffahrzeuge H und L im Sinne von Absatz 4.2.1.1.2 erhalten die Bezeichnungen HR und LR für die Fahrwiderstandsfamilie.
4.2.1.2.3.3. Neben den Vorgaben laut den Absätzen 2.3.1 und 2.3.2 des Unteranhangs 6 für eine Interpolationsfamilie muss die Differenz des Zyklusenergiebedarfs zwischen HR und LR der Fahrwiderstandsfamilie, basierend auf HR über einen vollständigen WLTC-Zyklus Klasse 3, mindestens 4 % und höchstens 35 % betragen.
Ist mehr als ein Getriebe in der Fahrwiderstandsfamilie enthalten, so ist das Getriebe mit den größten Leistungsverlusten für die Bestimmung des Fahrwiderstands zu verwenden.
4.2.1.2.3.4. Wird die Fahrwiderstandsdifferenz der die Reibdifferenz verursachenden Fahrzeugvariante gemäß Absatz 6.8 bestimmt, muss eine neue Fahrwiderstandsfamilie unter Berücksichtigung der Fahrwiderstandsdifferenz von sowohl Fahrzeug L als auch Fahrzeug H dieser neuen Fahrwiderstandsfamilie berechnet werden.
f0,N = f0,R + f0, Delta
f1,N = f1,R + f1, Delta
f2,N = f2,R + f2, Delta
Dabei gilt:
| N | bezieht sich auf die Fahrwiderstandskoeffizienten der neuen Fahrwiderstandfamilie |
| R | bezieht sich auf die Fahrwiderstandskoeffizienten der Referenz-Fahrwiderstandsfamilie |
| Delta | bezieht sich auf die in Absatz 6.8.1 bestimmte Differenz der Fahrwiderstandskoeffizienten |
4.2.1.3. Zulässige Kombinationen aus Prüffahrzeugauswahl und Familienvorgaben18
Aus Tabelle A4/1 gehen die zulässigen Kombinationen aus der Prüffahrzeugauswahl und den Familienvorgaben gemäß Beschreibung in den Absätzen 4.2.1.1 und 4.2.1.2 hervor.
Tabelle A4/1 Zulässige Kombinationen aus Prüffahrzeugauswahl und Familienvorgaben18
| Zu erfüllende Anforderungen: | (1) ohne Interpolationsmethode | (2) Interpolationsmethode ohne Fahrwiderstandsfamilie | (3) Anwendung der Fahrwiderstandsfamilie | (4) Interpolationsmethode bei Anwendung einer oder mehrerer Fahrwiderstandsfamilien |
| Auf den Fahrwiderstand geprüftes Fahrzeug | Absatz 4.2.1.1.1 | Absatz 4.2.1.1.2 | Absatz 4.2.1.1.2 | k. A. |
| Familie | Absatz 4.2.1.2.1 | Absatz 4.2.1.2.2 | Absatz 4.2.1.2.3 | Absatz 4.2.1.2.2 |
| Weitere | entfällt | entfällt | entfällt | Anwendung von Spalte (3) "Anwendung der Fahrwiderstandsfamilie" und Anwendung von Absatz 4.2.1.3.1. |
4.2.1.3.1 Ableitung von Fahrwiderstandswerten für eine Interpolationsfamilie von einer Fahrwiderstandsfamilie
Die Fahrwiderstandswerte HR und/oder LR sind gemäß diesem Unteranhang zu bestimmen.
Der Fahrwiderstand von Fahrzeug H (und L) einer Interpolationsfamilie innerhalb der Fahrwiderstandsfamilie ist gemäß den Absätzen 3.2.3.2.2 bis 3.2.3.2.2.4 des Unteranhangs 7 folgendermaßen zu berechnen:
Die Fahrwiderstandsinterpolation darf nur bei denjenigen Fahrwiderstandsmerkmalen angewandt werden, die sich bei den Prüffahrzeugen LR und HR voneinander unterscheiden. Für andere Merkmale, die für den Fahrwiderstand relevant sind, gilt der Wert von Fahrzeug HR.
H und L der Interpolationsfamilie können von verschiedenen Fahrwiderstandsfamilien abgeleitet werden. Ergibt sich dieser Unterschied zwischen diesen Fahrwiderstandsfamilien aus der Anwendung der Differenzmethode, siehe Absatz 4.2.1.2.3.4.
4.2.1.3.2 - gestrichen -18
4.2.1.3.3 - gestrichen -18
4.2.1.3.4 - gestrichen -18
4.2.1.3.5 - gestrichen -18
4.2.1.4. Anwendung der Fahrwiderstandsmatrix-Familie (Straße)
Ein Fahrzeug, das die Kriterien von Absatz 5.8 dieses Anhangs erfüllt und das:
Kann keine repräsentative Karosserieform für ein vollständiges Fahrzeug bestimmt werden, so ist das Prüffahrzeug mit einem viereckigen Kasten mit abgerundeten Ecken mit einem Radius von höchstens 25 mm und einer Breite, die der Höchstbreite der durch die Fahrwiderstandsmatrix-Familie (Straße) abgedeckten Fahrzeuge entspricht, und einer Gesamthöhe des Prüffahrzeugs einschließlich des Kastens von 3,0 m ± 0,1 m, auszurüsten.
Der Hersteller und die Genehmigungsbehörde legen im Einvernehmen fest, welches Modell eines Prüffahrzeugs als repräsentativ gilt.
Die Fahrzeugparameter Prüfmasse, Reifenrollwiderstand und Fahrzeugfront eines HM- und LM-Fahrzeugs sind so zu bestimmen, dass das HM-Fahrzeug den höchsten Zyklusenergiebedarf und das LM-Fahrzeug den geringsten Zyklusenergiebedarf der Fahrwiderstandsmatrix-Familie (Straße) verursacht. Der Hersteller und die Genehmigungsbehörde legen im Einvernehmen die Fahrzeugparameter für das HM-Fahrzeug und das LM-Fahrzeug fest.
Der Fahrwiderstand (Straße) aller Einzelfahrzeuge der Fahrwiderstandsmatrix-Familie (Straße) einschließlich HM und LM ist gemäß Absatz 5.1 dieses Unteranhangs zu berechnen.
4.2.1.5. Bewegliche aerodynamische Karosserieteile
Bewegliche aerodynamische Karosserieteile an den Prüffahrzeugen müssen während der Fahrwiderstandsbestimmung (Straße) zu den Prüfbedingungen gemäß WLTP-Prüfzyklus Typ 1 (Prüftemperatur, Fahrzeuggeschwindigkeit und Beschleunigungsbereich, Motorlast usw.) betrieben werden.
Jedes Fahrzeugsystem, das dynamisch den Luftwiderstand des Fahrzeugs ändert (z.B. Fahrzeughöhensteuerung) ist als ein bewegliches aerodynamisches Karosserieteil zu betrachten. Geeignete Anforderungen sind hinzuzufügen, falls die Zusatzausrüstung künftiger Fahrzeuge bewegliche aerodynamische Teile enthält, deren Einfluss auf den Luftwiderstand den Bedarf weiterer Anforderungen begründet.
4.2.1.6. Wägung
Vor und nach dem Verfahren zur Bestimmung des Fahrwiderstands (Straße) ist das ausgewählte Fahrzeug einschließlich des Fahrers und der Ausrüstung zu wiegen, um die arithmetische Durchschnittsmasse mav zu bestimmen. Die Masse des Fahrzeugs muss größer als oder gleich der Prüfmasse von Fahrzeug H oder Fahrzeug L zu Beginn des Verfahrens zur Bestimmung des Fahrwiderstands (Straße) sein.
4.2.1.7 Konfiguration des Prüffahrzeugs
Die Konfiguration des Prüffahrzeugs ist in alle einschlägigen Prüfberichte aufzunehmen und für jede Ausrollprüfung zu verwenden.
4.2.1.8. Zustand des Prüffahrzeugs
4.2.1.8.1 Einfahren18
Das Prüffahrzeug ist in geeigneter Weise für den Zweck der darauf folgenden Prüfung über mindestens 10.000 jedoch nicht mehr als 80.000 km einzufahren.
Auf Antrag des Herstellers kann ein Fahrzeug mit mindestens 3.000 km verwendet werden.
4.2.1.8.1.1 - gestrichen -18
4.2.1.8.2 Herstellerangaben
Das Fahrzeug muss mit den vom Hersteller vorgesehenen Spezifikationen für das Serienfahrzeug hinsichtlich der Reifendrücke gemäß Absatz 4.2.2.3 dieses Unteranhangs, der Fahrwerksgeometrie/Spureinstelllung gemäß Absatz 4.2.1.8.3 dieses Unteranhangs, der Bodenfreiheit, der Fahrzeughöhe, der Schmierung von Antriebsstrang und Radlager sowie der Bremseinstellung übereinstimmen, um unrepräsentative Störeinflüsse zu vermeiden.
4.2.1.8.3 Spureinstellung
Die Spur- und Sturzwerte sind auf die maximale Abweichung von der Fahrzeuglängsachse in dem vom Hersteller definierten Bereich einzustellen. Schreibt ein Hersteller bestimmte Spur- und Sturzwerte für das Fahrzeug vor, so sind diese Werte zu verwenden. Auf Antrag des Herstellers können höhere als die vorgeschriebenen Werte für Abweichungen von der Fahrzeuglängsachse verwendet werden. Die vorgeschriebenen Werte sind die Bezugswerte für alle Wartungstätigkeiten während der Lebensdauer des Fahrzeugs.
Sonstige einstellbare Parameter der Spureinstellung (z.B. Nachlauf) sind auf die vom Hersteller empfohlenen Werte zu setzen. Stehen keine empfohlenen Werte zur Verfügung, sind diese auf den vom Hersteller definierten arithmetischen Durchschnittsbereich einzustellen.
Diese einstellbaren Parameter und vorgeschriebenen Werte sind in alle einschlägigen Prüfblätter aufzunehmen.
4.2.1.8.4 Geschlossene Abdeckungen
Während der Bestimmung des Fahrwiderstands (Straße) müssen die Motorraumabdeckung, die Kofferraumabdeckung, die manuell betätigten beweglichen Abdeckungen und alle Fenster geschlossen sein.
4.2.1.8.5 Ausrollmodus18
Können die in den Absätzen 8.1.3 oder 8.2.3 beschriebenen Kriterien bei der Bestimmung der Einstellungen des Rollenprüfstands aufgrund nichtreproduzierbarer Kräfte nicht erfüllt werden, so ist das Fahrzeug mit einem Fahrzeug-Ausrollmodus auszurüsten. Der Ausrollmodus muss von der Genehmigungsbehörde genehmigt werden, und seine Verwendung ist in allen einschlägigen Prüfberichten festzuhalten.
Ist ein Fahrzeug mit einem Fahrzeug-Ausrollmodus ausgerüstet, so ist dieser sowohl während der Bestimmung des Fahrwiderstands als auch auf dem Rollenprüfstand zu aktivieren.
4.2.1.8.5.1 - gestrichen -18
4.2.2. Reifen
4.2.2.1. Reifenrollwiderstand18 20
Die Messung der Reifenrollwiderstandswerte hat gemäß Anhang 6 der UNECE-Regelung Nr. 117 - Änderungsserie 02 zu erfolgen. Die Rollwiderstandskoeffizienten müssen gemäß den Rollwiderstandsklassen in Verordnung (EG) Nr. 1222/2009 (siehe Tabelle A4/2) abgeglichen und klassifiziert werden.
Tabelle A4/2 Energieeffizienzklassen gemäß Rollwiderstandskoeffizienten (RWK) für C1-, C2- und C3-Reifen und RWK-Werte zur Verwendung für diese Energieeffizienzklassen bei der Interpolation (in kg/t)18
| Energieeffizienzklasse | RWK-Wert zur Verwendung bei der Interpolation - C1-Reifen | RWK-Wert zur Verwendung bei der Interpolation - C2-Reifen | RWK-Wert zur Verwendung bei der Interpolation - C3-Reifen |
| A | RWK = 5,9 | RWK = 4,9 | RWK = 3,5 |
| B | RWK = 7,1 | RWK = 6,1 | RWK = 4,5 |
| C | RWK = 8,4 | RWK = 7,4 | RWK = 5,5 |
| D | Leer | Leer | RWK = 6,5 |
| E | RWK = 9,8 | RWK = 8,6 | RWK = 7,5 |
| F | RWK = 11,3 | RWK = 9,9 | RWK = 8,5 |
| G | RWK = 12,9 | RWK = 11,2 | Leer |
Wird die Interpolationsmethode zum Zwecke der Berechnung nach Absatz 3.2.3.2 des Unteranhangs 7 auf den Rollwiderstand angewandt, sind für das Berechnungsverfahren die tatsächlichen Rollwiderstandswerte für diejenigen Reifen zu verwenden, die an den Prüffahrzeugen L und H montiert sind. Bei einem Einzelfahrzeug innerhalb einer Interpolationsfamilie ist der RWK-Wert für die Energieeffizienzklasse der montierten Reifen zu verwenden.
Kann ein Fahrzeug mit einem vollständigen Satz standardmäßiger Reifen und Räder und einem vollständigen Satz Winterreifen (gekennzeichnet mit dem Symbol aus dreizackigem Berg und Schneeflocke, "3PMS" oder "Alpine-Symbol") mit oder ohne Räder geliefert werden, gelten die Winterreifen und ihre Räder nicht als Zusatzausrüstung.
4.2.2.2. Reifenzustand18
Reifen, die für die Prüfung verwendet werden,
Nach der Messung der Profiltiefe ist die Fahrstrecke auf 500 km zu begrenzen. Bei Überschreitung dieser 500 km ist die Profiltiefe erneut zu messen.
4.2.2.2.1 - gestrichen -18
4.2.2.3. Reifendruck
Die Vorder- und Hinterreifen sind, wie vom Hersteller festgelegt, an der jeweiligen Achse und dem ausgewählten Reifen mit der Ausrollprüfmasse auf den unteren Grenzwert des Reifendruckbereichs aufzupumpen.
4.2.2.3.1 Reifendruckregelung
Beträgt die Differenz zwischen Umgebungs- und Abkühltemperatur mehr als 5 °C, so ist der Reifendruck folgendermaßen anzupassen:
Δpt = 0,8 × (Tsoak - Tamb)
Dabei ist:
ΔPt die dem Reifendruck gemäß Absatz 4.2.2.3 dieses Unteranhangs hinzugefügte Reifendruckanpassung in kPa
0,8 der Druckanpassungsfaktor in °C
Tsoak die Reifenabkühltemperatur in °C
Tamb die Umgebungsprüftemperatur in °C
4.2.3. Instrumentenausrüstung
Instrumente sind derart zu installieren, dass ihr Einfluss auf die aerodynamischen Merkmale des Fahrzeugs minimiert wird.
Ist der Einfluss des installierten Instruments auf (CD × Af) wahrscheinlich größer als 0,015 m2, so ist das Fahrzeug mit und ohne Instrument in einem Windkanal zu messen, der dem Kriterium von Absatz 3.2 dieses Unteranhangs genügt. Die entsprechende Differenz ist von f2 abzuziehen. Auf Antrag des Herstellers und mit Genehmigung der Genehmigungsbehörde kann der ermittelte Wert für ähnliche Fahrzeuge verwendet werden, bei denen der Einfluss der Ausrüstung wahrscheinlich den gleichen Einfluss hat.
4.2.4. Aufwärmen des Fahrzeugs
4.2.4.1. Auf der Straße
Das Aufwärmen darf nur durch Fahren des Fahrzeugs erfolgen.
4.2.4.1.1 Vor dem Aufwärmen ist das Fahrzeug zu verzögern, wobei die Kupplung deaktiviert sein muss oder ein automatisches Getriebe in die Neutralstellung gebracht wird und innerhalb von 5 bis 10 Sekunden maßvoll von 80 auf 20 km/h gebremst wird. Nach diesem Bremsvorgang darf keine weitere Betätigung oder manuelle Anpassung der Bremsanlage erfolgen.
Auf Antrag des Herstellers und mit Genehmigung der Genehmigungsbehörde können die Bremsen auch nach dem Aufwärmen mit derselben Verzögerung wie in diesem Absatz beschrieben betätigt werden
4.2.4.1.2 Aufwärmen und Stabilisierung18
Alle Fahrzeuge sind mit 90 % der Höchstgeschwindigkeit des anzuwendenden WLTC zu fahren. Das Fahrzeug ist für mindestens 20 Minuten aufzuwärmen, bis stabile Bedingungen erreicht sind.
Tabelle A4/3 frei gelassen18
4.2.4.1.3 Kriterium für den stabilen Zustand
Siehe Absatz 4.3.1.4.2 dieses Unteranhangs.
4.3. Messung und Berechnung des Fahrwiderstands (Straße) anhand der Ausrollmethode
Der Fahrwiderstand (Straße) ist entweder mittels stationärer Anemometrie (Absatz 4.3.1 dieses Unteranhangs) oder On-Board-Anemometrie (Absatz 4.3.2 dieses Unteranhangs) zu bestimmen.
4.3.1. Ausrollmethode mit stationärer Anemometrie
4.3.1.1. Auswahl der Bezugsgeschwindigkeiten für die Bestimmung der Fahrwiderstandskurve18
Die Bezugsgeschwindigkeiten für die Bestimmung des Fahrwiderstands müssen entsprechend Absatz 2.2 ausgewählt werden.
Während der Prüfung sind die Zeit und die Fahrzeuggeschwindigkeit mit einer Frequenz von mindestens 10 Hz zu messen.
4.3.1.2 Datenerfassung
Während der Prüfung sind die Zeit und die Fahrzeuggeschwindigkeit mit einer Frequenz von mindestens 5 Hz zu messen.
4.3.1.3. Fahrzeugausrollmethode
4.3.1.3.1 Im Anschluss an das in Absatz 4.2.4 dieses Unteranhangs beschriebene Aufwärmverfahren und unmittelbar vor jeder Prüfmessung ist das Fahrzeug auf 10 bis 15 km/h über der höchsten Bezugsgeschwindigkeit zu beschleunigen und mit dieser Geschwindigkeit höchstens eine Minute lang zu fahren. Danach muss unverzüglich das Ausrollen beginnen.
4.3.1.3.2 Während des Ausrollens muss sich das Getriebe in Neutralstellung befinden. So weit wie möglich sind Bewegungen des Lenkrads zu vermeiden und die Fahrzeugbremsen dürfen nicht betätigt werden.
4.3.1.3.3 Die Prüfung ist so lange zu wiederholen, bis die Ausrolldaten den Anforderungen hinsichtlich der statistischen Präzision gemäß Absatz 4.3.1.4.2 genügen.
4.3.1.3.4 Obwohl empfohlen wird, jede Ausrollfahrt ohne Unterbrechung durchzuführen, sind Teilfahrten zulässig, wenn in einer einzigen Fahrt nicht für alle Geschwindigkeitsbezugspunkte Daten gesammelt werden können. Für Teilfahrten gelten folgende zusätzliche Anforderungen:
4.3.1.4. Messung der Ausrollzeit18
4.3.1.4.1 Es ist die der Bezugsgeschwindigkeit vj entsprechende Ausrollzeit zu messen, die zwischen der Fahrzeuggeschwindigkeit (vj + 5 km/h) bis zu (vj - 5 km/h) verstreicht.
4.3.1.4.2 Diese Messungen sind in entgegengesetzten Richtungen durchzuführen, bis mindestens drei Messpaare ermittelt wurden, die der statistischen Präzision pj nach folgender Gleichung genügen:

Dabei gilt:
| pj | ist die statistische Präzision der bei der Bezugsgeschwindigkeit vj durchgeführten Messungen |
| n | ist die Anzahl der Messpaare |
| Δtpj | ist das harmonische Mittel der Ausrollzeit bei der Bezugsgeschwindigkeit vj in Sekunden gemäß folgender Gleichung:
Dabei gilt: |
| Δtji | ist die harmonische mittlere Ausrollzeit des i-ten Messpaares, bei Geschwindigkeit vj (in Sekunden, s) gemäß folgender Gleichung:
Dabei gilt: |
| Δtjai und Δtjbi | sind die Ausrollzeiten der i-ten Messung bei der Bezugsgeschwindigkeit vj (in Sekunden, s) in den jeweiligen Richtungen a und b |
| Ãj | ist die Standardabweichung (in Sekunden, s) gemäß:
|
| h | ist der in Tabelle A4/4 angegebene Koeffizient |
Tabelle A4/4 Koeffizient h als Funktion von m18
| n | h | n | h |
| 3 | 4,3 | 17 | 2,1 |
| 4 | 3,2 | 18 | 2,1 |
| 5 | 2,8 | 19 | 2,1 |
| 6 | 2,6 | 20 | 2,1 |
| 7 | 2,5 | 21 | 2,1 |
| 8 | 2,4 | 22 | 2,1 |
| 9 | 2,3 | 23 | 2,1 |
| 10 | 2,3 | 24 | 2,1 |
| 11 | 2,2 | 25 | 2,1 |
| 12 | 2,2 | 26 | 2,1 |
| 13 | 2,2 | 27 | 2,1 |
| 14 | 2,2 | 28 | 2,1 |
| 15 | 2,2 | 29 | 2,0 |
| 16 | 2,1 | 30 | 2,0 |
4.3.1.4.3 Tritt während einer Messung in einer Richtung ein externer Faktor oder eine Einwirkung durch den Fahrer auf, der oder die die Prüfung des Fahrwiderstands auf der Straße deutlich beeinflusst, so sind diese Messung und die entsprechende Messung in der entgegengesetzten Richtung zu verwerfen. Alle verworfenen Daten müssen zusammen mit dem Grund für die Verwerfung festgehalten werden; zudem darf die Anzahl der verworfenen Messpaare nicht mehr als 1/3 der Anzahl der Messpaare insgesamt entsprechen. Es ist die maximale Anzahl der Paare zu bewerten, die innerhalb der statistischen Präzision im Sinne von Absatz 4.3.1.4.2 liegen. Bei einem Ausschluss sind Paare von den Bewertungen auszuschließen, wobei mit dem Paar zu beginnen ist, das die größte Abweichung vom Mittelwert aufweist.
4.3.1.4.4 Die folgende Gleichung ist für die Berechnung des arithmetischen Mittelwerts des Fahrwiderstands auf der Straße zu verwenden, wobei der harmonische Mittelwert der abwechselnden Ausrollzeiten zu berücksichtigen ist.

Dabei gilt:
| Δtj | ist das harmonische Mittel der Messungen der abwechselnden Ausrollzeiten bei Geschwindigkeit vj (in Sekunden, s) gemäß:
Dabei gilt: |
| Δtja und Δtjb | sind das harmonische Mittel der Ausrollzeiten in den jeweiligen Richtungen a und b entsprechend der Bezugsgeschwindigkeit vj (in Sekunden, s) gemäß folgender zwei Gleichungen:
Dabei gilt: |
| mav | ist der arithmetische Mittelwert der Prüffahrzeugmassen zu Beginn und am Ende der Bestimmung des Fahrwiderstands (in kg); |
| mr | ist die gleichwertige effektive Masse der rotierenden Bauteile gemäß Absatz 2.5.1 |
Die Koeffizienten f0, f1 und f2, in der Fahrwiderstandsgleichung sind mit einer Regressionsanalyse nach der Methode der kleinsten Quadrate zu berechnen.
Handelt es sich bei dem geprüften Fahrzeug um das repräsentative Fahrzeug einer Fahrwiderstandsmatrix-Familie, so ist der Koeffizient f1 auf Null zu setzen, und die Koeffizienten f0 sowie f2 sind mit einer Regressionsanalyse nach der Methode der kleinsten Quadrate neu zu berechnen.
4.3.2. Ausrollmethode mit On-Board-Anemometrie
Das Fahrzeug ist gemäß Absatz 4.2.4 dieses Unteranhangs aufzuwärmen und zu stabilisieren.
4.3.2.1. Zusätzliche Instrumente für die On-Board-Anemometrie
Das On-Board-Anemometer und die Instrumente sind im Betrieb am Prüffahrzeug zu kalibrieren, wenn eine Kalibrierung während des Aufwärmens für die Prüfung notwendig wird.
4.3.2.1.1 Die relative Windgeschwindigkeit ist mit einer Mindestfrequenz von 1 Hz und einer Genauigkeit von 0,3 m/s zu messen. Die Blockierung des Fahrzeugs ist bei der Kalibrierung des Anemometers zu berücksichtigen.
4.3.2.1.2 Die Windrichtung muss relativ zur Fahrzeugrichtung sein. Die relative Windrichtung (Gierachse) ist mit einer Auflösung von 1 Grad und einer Genauigkeit von 3 Grad zu messen. Die Totzone des Instruments darf 10 Grad nicht überschreiten und muss zum Fahrzeugheck hin gerichtet sein.
4.3.2.1.3 Vor dem Ausrollen ist das Anemometer in Bezug auf Windgeschwindigkeit und Gierrate gemäß ISO 10521-1:2006(E) Anhang a zu kalibrieren.
4.3.2.1.4 Die Blockierung des Anemometers ist im Kalibrierungsverfahren gemäß ISO 10521-1:2006(E) Anhang a zu korrigieren, um ihren Effekt zu minimieren.
4.3.2.2. Auswahl des Fahrzeuggeschwindigkeitsbereichs für die Bestimmung der Fahrwiderstandskurve (Straße)
Der Geschwindigkeitsbereich des Prüffahrzeugs ist gemäß Absatz 2.2 dieses Unteranhangs auszuwählen.
4.3.2.3 Datenerfassung18
Während der Prüfung sind die abgelaufene Zeit, die Fahrzeuggeschwindigkeit und die Luftgeschwindigkeit (Windgeschwindigkeit, Richtung) relativ zum Fahrzeug mit einer Frequenz von mindestens 5 Hz zu messen. Die Umgebungstemperatur ist zu synchronisieren und mit einer Mindestfrequenz von 0,1 Hz zu messen.
4.3.2.4. Fahrzeugausrollmethode
Die Messungen sind in entgegengesetzten Richtungen durchzuführen, bis mindestens zehn aufeinanderfolgende Fahrten (fünf in jeder Richtung) erfolgt sind. Genügt eine Fahrt nicht den geforderten On-Board- Anemometrie-Prüfbedingungen, so sind diese Fahrt und die entsprechende Fahrt in entgegengesetzter Richtung zu verwerfen. Alle gültigen Messpaare sind in die endgültige Analyse mit mindestens 5 Ausrollfahrten aufzunehmen. Vgl. die statistischen Validierungskriterien in Absatz 4.3.2.6.10 dieses Unteranhangs.
Das Anemometer ist so zu installieren, dass der Effekt auf die Betriebseigenschaften des Fahrzeugs minimiert ist.
Das Anemometer ist gemäß einer der folgenden Optionen zu installieren:
In allen Fällen ist das Anemometer parallel zur Fahrbahnoberfläche zu installieren. Falls die Positionen b oder c verwendet werden, sind die Ausrollergebnisse analytisch anzupassen, um den zusätzlichen Luftwiderstand aufgrund des Anemometers zu berücksichtigen. Zur Anpassung ist das ausrollende Fahrzeug in einem Windkanal sowohl mit dem als auch ohne das in derselben Position wie auf dem Prüfstand installierte Anemometer zu prüfen. Die berechnete Differenz ist der graduelle Luftwiderstandskoeffizient CD in Kombination mit der Fahrzeugfront zur Korrektur der Ausrollergebnisse.
4.3.2.4.1 Im Anschluss an das in Absatz 4.2.4 dieses Unteranhangs beschriebene Aufwärmverfahren und unmittelbar vor jeder Prüfmessung ist das Fahrzeug auf 10 bis 15 km/h über der höchsten Bezugsgeschwindigkeit zu beschleunigen und mit dieser Geschwindigkeit höchstens eine Minute lang zu fahren. Danach muss unverzüglich das Ausrollen beginnen.
4.3.2.4.2 Während des Ausrollens muss sich das Getriebe in Neutralstellung befinden. So weit wie möglich sind Bewegungen des Lenkrads zu vermeiden und die Fahrzeugbremsen dürfen nicht betätigt werden.
4.3.2.4.3 Obwohl empfohlen wird, jede Ausrollfahrt ohne Unterbrechung durchzuführen, sind Teilfahrten zulässig, wenn in einer einzigen Fahrt nicht für alle Geschwindigkeitsbezugspunkte Daten gesammelt werden können. Für Teilfahrten gelten folgende zusätzliche Anforderungen:
4.3.2.5. Bestimmung der Bewegungsgleichung18
Die in den Bewegungsgleichungen des On-Board-Anemometers verwendeten Symbole sind in Tabelle A4/5 aufgelistet.
Tabelle A4/5 Die in den Bewegungsgleichungen des On-Board-Anemometers verwendeten Symbole18
| Symbol | Einheiten | Beschreibung |
| Af | m2 | Fahrzeugfront |
| a0... an | Grad-1 | Luftwiderstandskoeffizienten als Funktion des Gierwinkels |
| Am | N | mechanischer Widerstandskoeffizient |
| Bm | N/(km/h) | mechanischer Widerstandskoeffizient |
| Cm | N/(km/h)2 | mechanischer Widerstandskoeffizient |
| CD(Y) | Luftwiderstandskoeffizient bei Gierwinkel Y | |
| D | N | Widerstand |
| Daero | N | Luftwiderstand |
| Df | N | Widerstand der Vorderachse (einschließlich Antriebssystem) |
| Dgrav | N | Widerstand durch Schwerkraft |
| Dmech | N | mechanischer Widerstand |
| Dr | N | Widerstand der Hinterachse (einschließlich Antriebssystem) |
| Dtyre | N | Reifenrollwiderstand |
| (dh/ds) | - | Sinus der Neigung des Prüfstands in der Fahrtrichtung (+ gibt eine Steigung an) |
| (dv/dt) | m/s2 | Beschleunigung |
| g | m/s2 | Schwerkraftskonstante |
| mav | kg | arithmetische Durchschnittsmasse des Prüffahrzeugs vor und nach der Bestimmung des Fahrwiderstands (Straße) |
| me | kg | effektive Fahrzeugträgheit einschließlich rotierender Bauteile |
| P | kg/m3 | Luftdichte |
| t | s | Zeit |
| T | K | Temperatur |
| v | km/h | Fahrzeuggeschwindigkeit |
| vr | km/h | relative Windgeschwindigkeit |
| Y | Grad | Gierwinkel des scheinbaren Winds relativ zur Fahrtrichtung des Fahrzeugs |
4.3.2.5.1 Allgemeine Form18
Die allgemeine Form der Bewegungsgleichung ist folgende:
![]()
Dabei ist:
Dmech = Dtyre + Df + Dr;
Ist die Neigung der Prüfstrecke gleich oder weniger als 0,1 % über ihre Länge, so kann Dgrav auf Null gesetzt werden.
4.3.2.5.2 Modell des mechanischen Widerstands
Der mechanische Widerstand, der aus selbständigen Komponenten besteht und Reibungsverluste der Reifen Dtyre sowie der Vorder- und Hinterachse Df und Dr repräsentiert (einschließlich Verlusten im Getriebe), ist als dreistelliges Polynom als Funktion der Fahrzeuggeschwindigkeit v gemäß folgender Gleichung zu modellieren:
Dmech = Am + Bmv + Cmv2
Dabei gilt:
Am, Bm und Cm werden in der Datenanalyse nach der Methode der Mindestquadrate bestimmt. Diese Konstanten stellen den kombinierten Widerstand des Antriebssystems und der Reifen dar.
Handelt es sich bei dem geprüften Fahrzeug um das repräsentative Fahrzeug einer Fahrwiderstandsmatrix- Familie (Straße), so ist der Koeffizient Bm auf Null zu setzen und die Koeffizienten Am und Cm sind mit einer Regressionsanalyse nach der Methode der Mindestquadrate neu zu berechnen.
4.3.2.5.3 Modell des Luftwiderstands
Der Luftwiderstandskoeffizient CD(Y) ist als vierstelliges Polynom als Funktion des Gierwinkels Y gemäß folgender Gleichung zu modellieren:
CD(Y) = a0 + a1Y + a2Y2 + a3Y3 + a4Y4
a0 bis a4 sind konstante Koeffizienten, die in der Datenanalyse bestimmt werden.
Der Luftwiderstand wird bestimmt, indem der Widerstandskoeffizient mit der Fahrzeugfront Af und der relativen Windgeschwindigkeit kombiniert wird.
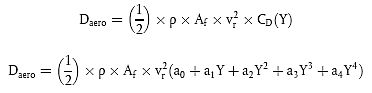
4.3.2.5.4 Endgültige Form der Bewegungsgleichung18
Durch Substitution erhält man folgende endgültige Form der Bewegungsgleichung:
![]()
4.3.2.6. Datenreduktion
Es ist eine Gleichung mit drei Termen zu bilden, um den Fahrwiderstand (Straße) als eine Funktion der Geschwindigkeit, F = a + Bv + Cv2, korrigiert hinsichtlich der Standard-Umgebungstemperatur und den Druckbedingungen, und bei Windstille zu beschreiben. Die Methode für diese Analyse ist in den Absätzen 4.3.2.6.1 bis einschließlich 4.3.2.6.10 dieses Unteranhangs beschrieben.
4.3.2.6.1 Bestimmung der Kalibrierungskoeffizienten
Wurden Kalibrierungsfaktoren für die Blockierung des Fahrzeugs nicht vorher bestimmt, so sind diese für die relative Windgeschwindigkeit und den Gierwinkel zu bestimmen. Messungen der Fahrzeuggeschwindigkeit v, der relativen Windgeschwindigkeit vr und der Gierrate Y sind während der Aufwärmphase des Prüfverfahrens aufzuzeichnen. Es sind Fahrtenpaare in unterschiedlichen Richtungen auf der Prüfstrecke bei einer konstanten Geschwindigkeit von 80 km/h durchzuführen und die arithmetischen Durchschnittswerte von v, vr und Y sind für jede Fahrt zu bestimmen. Es sind Kalibrierungsfaktoren, die die Gesamtfehler aufgrund von Gegen- und Seitenwinden bei allen Fahrtenpaaren minimieren, d. h. die Summe von (headi - headi+1)2 usw., auszuwählen, wobei sich headi und headi+1 auf die Windgeschwindigkeit und die Windrichtung in den Fahrtenpaaren in entgegengesetzten Richtungen während der Fahrzeug-Aufwärm- und Stabilisierungsphase vor der Prüfung beziehen.
4.3.2.6.2 Ableitung von Beobachtungen im Sekundentakt
Mittels der während der Ausrollfahrten gewonnenen Daten sind die Werte für v, (dh/ds)(dv/dt), vr2 und Y zu bestimmen, indem die gemäß den Absätzen 4.3.2.1.3 und 4.3.2.1.4 dieses Unteranhangs erhaltenen Kalibrierungsfaktoren angewendet werden. Zur Anpassung der Stichproben an die Frequenz von 1 Hz ist eine Datenfilterung anzuwenden.
4.3.2.6.3 Vorläufige Analyse18
Mithilfe einer linearen Regressionsanalyse nach der Methode der kleinsten Quadrate sind alle Datenpunkte sofort zu analysieren, um Am, Bm, Cm, a0, a1, a2, a3 und a4 gemäß me, (dh/ds), (dv/dt),v,vr, und ρ zu bestimmen.
4.3.2.6.4 Datenausreißer
Eine vorhergesagte Kraft me(dv/dt) ist zu berechnen und mit den beobachteten Datenpunkten zu vergleichen.
Datenpunkte mit zu starken Abweichungen, z.B. mehr als drei Standardabweichungen, sind zu kennzeichnen.
4.3.2.6.5 Datenfilterung (optional)
Es sind geeignete Methoden zur Datenfilterung anzuwenden und die verbleibenden Datenpunkte sind zu glätten.
4.3.2.6.6 Dateneliminierung
Datenpunkte, die bei Gierwinkeln erfasst wurden, die größer als ± 20 Grad der Fahrtrichtung des Fahrzeugs sind, sind zu kennzeichnen. Datenpunkte, die bei einer Windgeschwindigkeit von weniger als + 5 km/h erfasst wurden (zur Vermeidung von Bedingungen, bei denen der Rückenwind größer ist als die Fahrzeuggeschwindigkeit), sind ebenfalls zu kennzeichnen. Die Datenanalyse ist auf Fahrzeuggeschwindigkeiten innerhalb des gemäß Absatz 4.3.2.2 dieses Unteranhangs ausgewählten Geschwindigkeitsbereichs zu beschränken.
4.3.2.6.7 Endgültige Datenanalyse18
Alle nicht gekennzeichneten Daten sind mittels einer linearen Regressionsanalyse nach der Methode der Mindestquadrate zu analysieren. Am, Bm, Cm, a0, a1, a2, a3 und a4 sind gemäß me, (dh/ds), (dv/dt),v,vr, und ρ zu bestimmen.
4.3.2.6.8 Analyse mit Nebenbedingungen (optional) Zur besseren Unterscheidung des Luft- und mechanischen Widerstands des Fahrzeugs kann eine Analyse mit Nebenbedingungen so angewendet werden, dass die Fahrzeugfront Af und der Widerstandskoeffizient CD festgelegt werden können, falls sie zuvor bestimmt wurden.
4.3.2.6.9 Korrektur auf Bezugsbedingungen
Bewegungsgleichungen sind gemäß Absatz 4.5 dieses Unteranhangs auf Bezugsbedingungen hin zu korrigieren.
4.3.2.6.10 Statistische Kriterien für die On-Board-Anemometrie
Der Ausschluss jedes Einzelpaares von Ausrollfahrten verändert den berechneten Fahrwiderstand (Straße) für jede Ausrollbezugsgeschwindigkeit vj weniger als die Konvergenzanforderung für alle i und j:
![]()
Dabei ist:
ΔFi(vj) die Differenz in N zwischen dem berechneten Fahrwiderstand (Straße) mit allen Ausrollfahrten und dem berechneten Fahrwiderstand (Straße) unter Ausschluss des i-ten Paars der Ausrollfahrten
F(vj) der berechnete Fahrwiderstand (Straße) in N, unter Einschluss aller Ausrollfahrten
vj die Bezugsgeschwindigkeit in km/h
n die Anzahl an Ausrollfahrtenpaaren, unter Einschluss aller gültigen Paare.
Ist die Konvergenzanforderung nicht erfüllt, müssen Paare aus der Analyse entfernt werden, wobei mit dem Paar begonnen wird, das die größte Änderung im berechneten Fahrwiderstand (Fahrwiderstand) bewirkt, bis die Konvergenzanforderung erfüllt ist, jedoch müssen mindestens 5 gültige Paare für die endgültige Bestimmung des Fahrwiderstands (Straße) verwendet werden.
4.4. Messung und Bestimmung des Fahrwiderstands mit einem Drehmomentmesser
Als Alternative zu den Ausrollmethoden kann auch ein Drehmomentmesser verwendet werden, wobei der Fahrwiderstand durch die Messung des Raddrehmoments an den Antriebsrädern an den Geschwindigkeitsbezugspunkten in Zeitabschnitten von mindestens 5 Sekunden bestimmt wird.
4.4.1. Einbau des Drehmomentmessers18
Raddrehmomentmesser sind zwischen der Radnabe und dem Rad jedes Antriebsrads anzubringen, um so das zur Beibehaltung einer konstanten Fahrzeuggeschwindigkeit erforderliche Drehmoment zu messen.
Drehmomentmesser sind regelmäßig mindestens einmal pro Jahr zu kalibrieren und sie müssen auf nationale oder internationale Normen zurückführbar sein, um die erforderliche Genauigkeit und Präzision sicherzustellen.
4.4.2. Verfahren und Datenerhebung
4.4.2.1. Auswahl der Bezugsgeschwindigkeiten für die Bestimmung der Fahrwiderstandskurve
Die Bezugsgeschwindigkeitspunkte für die Bestimmung des Fahrwiderstands sind gemäß Absatz 2.2 dieses Unteranhangs auszuwählen.
Die Bezugsgeschwindigkeiten sind in absteigender Reihenfolge zu messen. Auf Antrag des Herstellers sind Stabilisierungsphasen zwischen den Messungen zulässig, aber die Stabilisierungsgeschwindigkeit darf die Geschwindigkeit der folgenden Bezugsgeschwindigkeit nicht überschreiten.
4.4.2.2. Datenerfassung
Es sind Datensätze aus tatsächlicher Geschwindigkeit vji, tatsächlichem Drehmoment Cji und der Zeit über mindestens 5 Sekunden für jede vj mit einer Frequenz von mindestens 10 Hz zu messen. Die über eine Zeitphase für eine Bezugsgeschwindigkeit vj erhobenen Datensätze gelten als eine Messung.
4.4.2.3 Verfahren der Fahrzeugdrehmomentmessung
Vor der Prüfmessung mit einem Drehmomentmesser ist gemäß Absatz 4.2.4 dieses Unteranhangs ein Aufwärmen des Fahrzeugs durchzuführen.
Während der Prüfmessung sind Bewegungen des Lenkrads so weit wie möglich zu vermeiden und die Fahrzeugbremsen dürfen nicht betätigt werden.
Die Prüfung ist zu wiederholen, bis die Daten des Fahrwiderstands den Präzisionsanforderungen hinsichtlich der Messung gemäß Absatz 4.4.3.2 dieses Unteranhangs genügen.
Obwohl empfohlen wird, jede Prüffahrt ohne Unterbrechung durchzuführen, sind Teilfahrten zulässig, wenn in einer einzigen Fahrt nicht für alle Geschwindigkeitsbezugspunkte Daten gesammelt werden können. Bei Teilfahrten ist darauf zu achten, dass die Fahrzeugbedingungen bei jedem Teilpunkt so stabil wie möglich bleiben.
4.4.2.4. Geschwindigkeitsabweichung18
Während einer Messung an einem einzelnen Geschwindigkeitsbezugspunkt muss die Geschwindigkeitsabweichung von der arithmetischen Durchschnittsgeschwindigkeit, vji-vjm, berechnet gemäß Absatz 4.4.3 dieses Unteranhangs, innerhalb der in Tabelle A4/6 angegebenen Werte liegen.
Zusätzlich darf die arithmetische Durchschnittsgeschwindigkeit vjm an jedem Geschwindigkeitsbezugspunkt von der Bezugsgeschwindigkeit vj um nicht mehr als ± 1 km/h oder 2 % der Bezugsgeschwindigkeit vj, je nachdem welcher Wert größer ist, abweichen.
Tabelle A4/6 Geschwindigkeitsabweichung18
| Zeitabschnitt in s | Geschwindigkeitsabweichung in (km/h) |
| 5 - 10 | ± 0,2 |
| 10 - 15 | ± 0,4 |
| 15 - 20 | ± 0,6 |
| 20 - 25 | ± 0,8 |
| 25 - 30 | ± 1,0 |
| 22 30 | ± 1,2 |
4.4.2.5. Umgebungstemperatur
Die Prüfungen sind unter den gleichen Temperaturbedingungen wie in Absatz 4.1.1.2 dieses Unteranhangs beschrieben durchzuführen.
4.4.3. Berechnung der arithmetischen Durchschnittsgeschwindigkeit und des arithmetischen Durchschnittsdrehmoments
4.4.3.1. Berechnung
Die arithmetische Durchschnittsgeschwindigkeit vjm in km/h und das arithmetische Durchschnittsdrehmoment Cjm in Nm von jeder Messung sind anhand der gemäß Absatz 4.4.2.2 dieses Unteranhangs gesammelten Datensätze mit folgender Gleichung zu berechnen:

und

Dabei ist:
vji die tatsächliche Fahrzeuggeschwindigkeit des i-ten Datensatzes am Geschwindigkeitsbezugspunkt j in km/h
k die Anzahl der Datensätze in einer einzelnen Messung
Cji das tatsächliche Drehmoment des i-ten Datensatzes in Nm
Cjs der Kompensationsterm für die Geschwindigkeitdrift in Nm gemäß folgender Gleichung:
Cjs = (mst + mr) × αjrj.![]() darf nicht größer als 0,05 sein und kann unberücksichtigt bleiben, wenn ± j nicht größer als ± 0,005 m/s2 ist
darf nicht größer als 0,05 sein und kann unberücksichtigt bleiben, wenn ± j nicht größer als ± 0,005 m/s2 ist
| mst | die Masse des Prüffahrzeugs in kg zu Beginn der Messungen, die erst unmittelbar vor dem Aufwärmverfahren und nicht früher zu messen ist |
| mr | die gleichwertige effektive Masse der rotierenden Bauteile in kg gemäß Absatz 2.5.1 dieses Unteranhangs |
| rj | der dynamische Radius des Reifens, der an einem Bezugspunkt von 80 km/h oder, falls die Geschwindigkeit niedriger als 80 km/h ist, am höchsten Geschwindigkeitsbezugspunkt des Fahrzeugs bestimmt wird und gemäß folgender Gleichung zu berechnen ist: |
| 1 | vjm | ||
| rj = | x | ||
| 3,6 | 2 × πn |
Dabei ist:
n die Rotationsfrequenz des gefahrenen Reifens in s-1
αj die arithmetische Durchschnittsbeschleunigung in m/s2, die gemäß folgender Gleichung zu berechnen ist:

Dabei ist:
ti der Zeitpunkt in s, an dem der i-te Datensatz erfasst wurde
4.4.3.2. Messpräzision18
Diese Messungen sind in entgegengesetzten Richtungen durchzuführen, bis mindestens drei Messpaare bei jeder Bezugsgeschwindigkeit vi vorliegen und für die![]() gemäß folgender Gleichung der Präzision ρj genügt:
gemäß folgender Gleichung der Präzision ρj genügt:
![]()
Dabei gilt:
n die Anzahl der Messpaare für Cjm![]() der Fahrwiderstand bei der Geschwindigkeit vj in Nm gemäß folgender Gleichung:
der Fahrwiderstand bei der Geschwindigkeit vj in Nm gemäß folgender Gleichung:

Dabei gilt:
Cjmi ist das arithmetische Durchschnittsdrehmoment des i-ten Messpaares in Nm bei der Geschwindigkeit vj gemäß folgender Gleichung:
Cjmi = 1/2 × (Cjmai + Cjmbi)
Dabei ist:
Cjmai und Cjmbi sind die arithmetischen Durchschnittsdrehmomente der i-ten Messung in Nm bei der Geschwindigkeit vj, die in Absatz 4.4.3.1 dieses Unteranhangs für jede Richtung a and b bestimmt werden
s die Standardabweichung in Nm gemäß folgender Gleichung:
![]()
h ein Koeffizient als Funktion von n gemäß Tabelle A4/4 in Absatz 4.3.1.4.2 dieses Unteranhangs.
4.4.4. Bestimmung der Fahrwiderstandskurve18
Die arithmetische Durchschnittsgeschwindigkeit und das arithmetische Durchschnittsdrehmoment bei jedem Geschwindigkeitsbezugspunkt sind gemäß folgenden Gleichungen zu berechnen:
Vjm = 1/2 × (vjma + vjmb)
Cjm = 1/2 × (Cjma + Cjmb)
Die folgende, nach der Methode der Mindestquadrate erstellte Regressionsanalysekurve des arithmetischen Durchschnittsfahrwiderstands ist auf alle Datenpaare (vjm, Cjm) bei allen Bezugsgeschwindigkeiten gemäß Absatz 4.4.2.1 dieses Unteranhangs anzuwenden, um die Koeffizienten c0, c1 und c2. zu bestimmen.
Die Koeffizienten c0, c1 und c2 sowie die auf dem Rollenprüfstand gemessenen Ausrollzeiten (siehe Absatz 8.2.4 dieses Unteranhangs) sind in alle einschlägigen Prüfblätter aufzunehmen.
Handelt es sich bei dem geprüften Fahrzeug um das repräsentative Fahrzeug einer Fahrwiderstandsmatrix- Familie (Straße), so ist der Koeffizient c1 auf Null zu setzen und die Koeffizienten c0 und c2 sind mit einer Regressionsanalyse nach der Methode der Mindestquadrate neu zu berechnen.
4.5. Korrektur auf Bezugsbedingungen und Messausrüstung
4.5.1. Korrekturfaktor des Luftwiderstands
Der Korrekturfaktor für den Luftwiderstand K2 ist gemäß folgender Gleichung zu bestimmen:
K2 = (T / 293 K) × (100 kPa / P)
Dabei ist:
T die arithmetische durchschnittliche Umgebungstemperatur aller Einzelfahrten in Kelvin (K)
P der arithmetische durchschnittliche Umgebungsdruck in kPa
4.5.2. Korrekturfaktor des Rollwiderstands
Der Korrekturfaktor K0 für den Rollwiderstand Kelvin-1 (K-1) kann auf der Grundlage empirischer Daten bestimmt und von der Genehmigungsbehörde für die jeweilige Fahrzeug- und Reifenprüfung genehmigt werden, oder gemäß folgender Gleichung als gesetzt gelten:
K0 = 8,6 × 10-3K-1
4.5.3. Windkorrektur
4.5.3.1. Windkorrektur mit stationärem Anemometer
4.5.3.1.1 Es ist eine Windkorrektur für die absolute Windgeschwindigkeit entlang der Prüfstrecke durchzuführen, indem die Differenz, die durch abwechselnde Fahrten nicht aus dem Koeffizienten f0 gemäß Bestimmung nach Absatz 4.3.1.4.4 oder aus c0 gemäß Bestimmung nach Absatz 4.4.4 gelöscht werden kann, subtrahiert wird.
4.5.3.1.2 Der Windkorrekturwiderstand w1 für die Ausrollmethode oder w2 für die Methode der Drehmomentmessung ist gemäß folgenden Gleichungen zu berechnen:

Dabei ist:
w1 der Windkorrekturwiderstand für die Ausrollmethode in N
f2 der Koeffizient des gemäß Absatz 4.3.1.4.4 dieses Unteranhangs bestimmten Terms
vw die untere arithmetische Durchschnittswindgeschwindigkeit aus entgegengesetzten Richtungen in m/s entlang der Prüfstrecke während der Prüfung
w2 der Windkorrekturwiderstand für die Methode der Drehmomentmessung in Nm
c2 der Koeffizient des gemäß Absatz 4.4.4 dieses Unteranhangs bestimmten aerodynamischen Terms für die Methode der Drehmomentmessung.
4.5.3.2. Windkorrektur mit On-Board-Anemometer
Für den Fall, dass die Ausrollmethode mit einer On-Board-Anemometrie erfolgt, sind w1 und w2 in den Gleichungen in Absatz 4.5.3.1.2 auf Null zu setzen, da die Windkorrektur bereits gemäß Absatz 4.3.2 dieses Unteranhangs angewendet wird.
4.5.4. Korrekturfaktor der Prüfmasse18
Der Korrekturfaktor K1 für die Prüfmasse des Prüffahrzeugs ist gemäß folgender Gleichung zu bestimmen:

Dabei ist:
f0 ein konstanter Term N
TM die Prüfmasse des Prüffahrzeugs in kg
mav ist der arithmetische Mittelwert der Prüffahrzeugmassen zu Beginn und am Ende der Bestimmung des Fahrwiderstands (in kg)
4.5.5. Korrektur der Fahrwiderstandskurve (Straße)
4.5.5.1. Die in Absatz 4.3.1.4.4 dieses Unteranhangs bestimmte Kurve ist auf die Bezugsbedingungen hin folgendermaßen zu korrigieren:
F* = ((f0 - w1 - K1) + f1v) × (1 + K0(T - 20)) + K2f2v2
Dabei ist:
F* der korrigierte Fahrwiderstand (Straße) in N
f0 der konstante Term N
f1 ist der Koeffizient des Terms erster Ordnung (in N/(km/h))
f2 ist der Koeffizient des Terms zweiter Ordnung (in N/(km/h)2)
K0 der Korrekturfaktor für den Rollwiderstand gemäß der Definition in Absatz 4.5.2 dieses Unteranhangs
K1 die Korrektur für die Prüfmasse gemäß der Definition in Absatz 4.5.4 dieses Unteranhangs
K2 der Korrekturfaktor für den Luftwiderstand gemäß der Definition in Absatz 4.5.1 dieses Unteranhangs
T der arithmetische Durchschnitt der Umgebungstemperatur in ° C
v die Fahrzeuggeschwindigkeit in km/h
w1 die Korrektur für den Windwiderstand in N gemäß der Definition in Absatz 4.5.3 dieses Unteranhangs
Das Ergebnis der Berechnung ((f0 - w1 - K1) × (1 + K0 × (T-20))) ist als Sollfahrwiderstandskoeffizient (Straße) At in der Berechnung der Einstellung des Widerstands des Rollenprüfstands gemäß Absatz 8.1 dieses Unteranhangs zu verwenden.
Das Ergebnis der Berechnung (f1 × (1 + K0 × (T-20))) ist als Sollfahrwiderstandskoeffizient Bt in der Berechnung der Einstellung des Widerstands des Rollenprüfstands gemäß Absatz 8.1 dieses Unteranhangs zu verwenden.
Das Ergebnis der Berechnung (K2 × f2) ist als Sollfahrwiderstandskoeffizient (Straße) Ct in der Berechnung der Einstellung des Widerstands des Rollenprüfstands gemäß Absatz 8.1 dieses Unteranhangs zu verwenden.
4.5.5.2. Die in Absatz 4.4.4 dieses Unteranhangs bestimmte Kurve ist auf die Bezugsbedingungen hin zu korrigieren und die Messausrüstung ist gemäß dem folgenden Verfahren zu installieren.
4.5.5.2.1 Korrektur auf Bezugsbedingungen18
C* = ((c0 - w2- K1) + c1v) × (1 + K0(T - 20)) + K2c2v2
Dabei ist:
C* der korrigierte Fahrwiderstand in Nm
c0 der gemäß Absatz 4.4.4 dieses Unteranhangs bestimmte konstante Term in Nm
c1 ist der Koeffizient des Terms erster Ordnung gemäß Bestimmung nach Absatz 4.4.4 (in Nm/(km/h))
c2 ist der Koeffizient des Terms zweiter Ordnung gemäß Bestimmung nach Absatz 4.4.4 (in Nm/(km/h)2)
K0 der Korrekturfaktor für den Rollwiderstand gemäß der Definition in Absatz 4.5.2 dieses Unteranhangs
K1 die Korrektur für die Prüfmasse gemäß der Definition in Absatz 4.5.4 dieses Unteranhangs
K2 der Korrekturfaktor für den Luftwiderstand gemäß der Definition in Absatz 4.5.1 dieses Unteranhangs
v die Fahrzeuggeschwindigkeit in km/h
T der arithmetische Durchschnitt der Umgebungstemperatur in °C
w2 die Korrektur für den Windwiderstand gemäß der Definition in Absatz 4.5.3 dieses Unteranhangs.
4.5.5.2.2 Korrektur für installierte Drehmomentmesser
Wird der Fahrwiderstand mit einem Drehmomentmesser bestimmt, so ist dieser zu korrigieren, um die Effekte auf die aerodynamischen Fahrzeugmerkmale der außen am Fahrzeug angebrachten Drehmomentmessausrüstung zu berücksichtigen.
Der Fahrwiderstandskoeffizient c2 ist gemäß folgender Gleichung zu korrigieren:
c2corr = K2 × c2 × (1+(Δ(CD × Af))/(CD' × Af'))
Dabei ist:
Δ(CD × Af) = (CD × Af) - (CD' × Af')
| CD' × Af' | das Produkt aus dem Luftwiderstandkoeffizienten multipliziert mit der Fahrzeugfront, wobei die Drehmomentmessausrüstung angebracht sein muss und die Messung in einem Windkanal erfolgt, der den Kriterien von Absatz 3.2 dieses Unteranhangs genügt, in m2 |
| CD × Af | das Produkt aus dem Luftwiderstandkoeffizienten multipliziert mit der Fahrzeugfront, wobei die Drehmomentmessausrüstung nicht angebracht sein darf und die Messung in einem Windkanal erfolgt, der den Kriterien von Absatz 3.2 dieses Unteranhangs genügt, in m2 |
4.5.5.2.3 Sollfahrwiderstandskoeffizienten
Das Ergebnis der Berechnung ((c0 - w2 - K1) × (1 + K0 × (T-20))) ist als Sollfahrwiderstandkoeffizient at in der Berechnung der Einstellung des Widerstands des Rollenprüfstands gemäß Absatz 8.2 dieses Unteranhangs zu verwenden.
Das Ergebnis der Berechnung (c1 × (1 + K0 × (T-20))) ist als Sollfahrwiderstandkoeffizient bt in der Berechnung der Einstellung des Widerstands des Rollenprüfstands gemäß Absatz 8.2 dieses Unteranhangs zu verwenden.
Das Ergebnis der Berechnung (c2coRRx r) ist als Sollfahrwiderstandkoeffizient ct in der Berechnung der Einstellung des Widerstands des Rollenprüfstands gemäß Absatz 8.2 dieses Unteranhangs zu verwenden.
5. Methode zur Berechnung des Fahrwiderstands auf der Straße oder des Fahrwiderstands auf der Grundlage von Fahrzeugparametern
5.1. Berechnung des Fahrwiderstands auf der Straße und des Fahrwiderstands auf dem Rollenprüfstand auf der Grundlage eines repräsentativen Fahrzeugs einer Fahrwiderstandsmatrix-Familie (Straße)
Wird der Fahrwiderstand (Straße) des repräsentativen Fahrzeugs nach einer in Absatz 4.3 dieses Unteranhangs beschriebenen Methode bestimmt, so ist der Fahrwiderstand (Straße) eines Einzelfahrzeugs gemäß Absatz 5.1.1 dieses Unteranhangs zu berechnen.
Wird der Fahrwiderstand des repräsentativen Fahrzeugs nach der in Absatz 4.4 dieses Unteranhangs beschriebenen Methode bestimmt, so ist der Fahrwiderstand eines Einzelfahrzeugs gemäß Absatz 5.1.2 dieses Unteranhangs zu berechnen.
5.1.1. Für die Berechnung des Fahrwiderstands (Straße) von Fahrzeugen einer Fahrwiderstandsmatrix-Familie (Straße) sind die in Absatz 4.2.1.4 dieses Unteranhangs beschriebenen Fahrzeugparameter und die in Absatz 4.3 dieses Unteranhangs bestimmten Fahrwiderstandskoeffizienten (Straße) des repräsentativen Prüffahrzeugs zu verwenden.
5.1.1.1. Die Fahrwiderstandskraft für ein Einzelfahrzeug ist gemäß folgender Gleichung zu berechnen:
Fc = f0 + (f1 × v) + (f2 × v2)
Dabei gilt:
| Fc | ist die berechnete Fahrwiderstandskraft als Funktion der Fahrzeuggeschwindigkeit in N |
| f0 | ist der konstante Fahrwiderstandskoeffizient in N gemäß folgender Gleichung:
|
| f0r | ist der konstante Fahrwiderstandskoeffizient des repräsentativen Fahrzeugs der Fahrwiderstandsmatrix-Familie in N |
| f1 | ist der Fahrwiderstandskoeffizient erster Ordnung (in N/(km/h)), der auf Null zu setzen ist |
| f2 | ist der Fahrwiderstandskoeffizient zweiter Ordnung (in N/(km/h)2) gemäß folgender Gleichung:
f2 = Max. ((0,05 × f2r + 0,95 × f2r × Af/Afr) (0,2 × f2r + 0,8 × f2r × Af/Afr)) |
| f2r | ist der Fahrwiderstandskoeffizient zweiter Ordnung des repräsentativen Fahrzeugs der Fahrwiderstandsmatrix-Familie (in N/(km/h)2) |
| v | ist die Fahrzeuggeschwindigkeit in km/h |
| TM | ist die tatsächliche Prüfmasse des Einzelfahrzeugs der Fahrwiderstandsmatrix-Familie in kg |
| TMr | ist die Prüfmasse des repräsentativen Fahrzeugs der Fahrwiderstandsmatrix-Familie in kg |
| Af | ist die Fahrzeugfront des Einzelfahrzeugs der Fahrwiderstandsmatrix-Familie in m2 |
| Afr | ist die Fahrzeugfront des repräsentativen Fahrzeugs der Fahrwiderstandsmatrix-Familie in m2 |
| RR | ist der Reifenrollwiderstand des Einzelfahrzeugs der Fahrwiderstandsmatrix-Familie in kg/Tonne |
| RRr | ist der Reifenrollwiderstand des repräsentativen Fahrzeugs der Fahrwiderstandsmatrix-Familie in kg/Tonne |
Für die an einem Einzelfahrzeug angebrachten Reifen wird der Wert des Rollwiderstands RR auf den Klassenwert der anwendbaren Reifenenergieeffizienzklasse gemäß Tabelle A4/2 festgelegt.
Gehören die Reifen an der Vorder- und Hinterachse zu unterschiedlichen Energieeffizienzklassen, ist der gewichtete Mittelwert anhand der Gleichung in Absatz 3.2.3.2.2.2 des Unteranhangs 7 zu berechnen.
Werden die gleichen Reifen an Prüffahrzeug L und H angebracht, ist der Wert von RRind bei der Anwendung der Interpolationsmethode auf RRH festzulegen.
5.1.2. Für die Berechnung des Fahrwiderstands von Fahrzeugen einer Fahrwiderstandsmatrix-Familie (Straße) sind die in Absatz 4.2.1.4 dieses Unteranhangs beschriebenen Fahrzeugparameter und die in Absatz 4.4 dieses Unteranhangs bestimmten Fahrwiderstandskoeffizienten des repräsentativen Prüffahrzeugs zu verwenden.
5.1.2.1. Die Fahrwiderstandskraft für ein Einzelfahrzeug ist gemäß folgender Gleichung zu berechnen:
Cc = c0 + c1 × v + c2 × v2
Dabei gilt:
| Cc | der berechnete Fahrwiderstand als Funktion der Fahrzeuggeschwindigkeit in Nm |
| c0 | der konstante Fahrwiderstandskoeffizient in N gemäß folgender Gleichung:
|
| c0r | ist der konstante Fahrwiderstandskoeffizient des repräsentativen Fahrzeugs der Fahrwiderstandsmatrix-Familie in Nm |
| c1 | ist der Fahrwiderstandskoeffizient erster Ordnung (in Nm/(km/h)), der auf Null zu setzen ist |
| c2 | ist der Fahrwiderstandskoeffizient zweiter Ordnung (in Nm/(km/h)2) gemäß folgender Gleichung:
c2 = r´/1,02 × Max. ((0,05 × 1,02 × c2r/r´ + 0,95 × 1,02 × c2r/r´ × Af/Afr) (0,2 × 1,02 × c2r/r´ + 0,8 × 1,02 × c2r/r´ × Af/Afr)) |
| c2r | ist der Fahrwiderstandskoeffizient zweiter Ordnung des repräsentativen Fahrzeugs der Fahrwiderstandsmatrix-Familie (in N/(km/h)2) |
| v | ist die Fahrzeuggeschwindigkeit in km/h |
| TM | ist die tatsächliche Prüfmasse des Einzelfahrzeugs der Fahrwiderstandsmatrix-Familie in kg |
| TMr | ist die Prüfmasse des repräsentativen Fahrzeugs der Fahrwiderstandsmatrix-Familie in kg |
| Af | ist die Fahrzeugfront des Einzelfahrzeugs der Fahrwiderstandsmatrix-Familie in m2 |
| Afr | ist die Fahrzeugfront des repräsentativen Fahrzeugs der Fahrwiderstandsmatrix-Familie in m2 |
| RR | ist der Reifenrollwiderstand des Einzelfahrzeugs der Fahrwiderstandsmatrix-Familie in kg/Tonne |
| RRr | ist der Reifenrollwiderstand des repräsentativen Fahrzeugs der Fahrwiderstandsmatrix-Familie in kg/Tonne |
| r´ | ist der bei 80 km/h erreichte dynamische Radius des Reifens auf dem Rollenprüfstand in m |
| 1,02 | ist ein approximativer Koeffizient zum Ausgleich von Verlusten im Antriebsstrang. |
5.2. Berechnung des Standardfahrwiderstands (Straße) auf der Grundlage von Fahrzeugparametern
5.2.1. Als Alternative für die Bestimmung des Fahrwiderstands (Straße) mit der Ausrollmethode oder einer Drehmomentmessung kann eine Berechnungsmethode für einen Standardfahrwiderstand (Straße) verwendet werden.
Für die Berechnung eines Standardfahrwiderstands (Straße) auf der Grundlage von Fahrzeugparametern sind mehrere Parameter, z.B. Prüfmasse, Breite und Höhe des Fahrzeugs, zu verwenden. Der Standardfahrwiderstand (Straße) Fc ist für die Geschwindigkeitsbezugspunkte zu berechnen.
5.2.2. Der Standardfahrwiderstand (Straße) wird mit folgender Gleichung berechnet:
Fc = f0 + f1 × v + f2 × v2
Dabei ist:
| Fc | die berechnete Standardfahrwiderstandskraft (Straße) als Funktion der Fahrzeuggeschwindigkeit in N |
| f0 | der konstante Fahrwiderstandskoeffizient (Straße) in N gemäß folgender Gleichung:
f0 = 0,140 × TM; |
| f1 | ist der Fahrwiderstandskoeffizient erster Ordnung (in N/(km/h)), der auf Null zu setzen ist |
| f2 | ist der Fahrwiderstandskoeffizient zweiter Ordnung (in N/(km/h)2), der anhand folgender Gleichung bestimmt wird:
f2 = (2,8 × 10-6 × TM) + (0,0170 × width × height); |
| v | die Fahrzeuggeschwindigkeit in km/h |
| TM | die Prüfmasse in kg |
| width | die Fahrzeugbreite gemäß Nummer 6.2 der Norm ISO 612:1978 in m |
| height | die Fahrzeughöhe gemäß Nummer 6.3 der Norm ISO 612:1978 in m |
6. Windkanalmethode
Die Windkanalmethode ist eine Methode zur Messung des Fahrwiderstands (Straße) unter Verwendung einer Kombination eines Windkanals und Rollenprüfstands oder eines Windkanals und eines Prüfstands mit Flachriemen. Die Prüfstände können separate Vorrichtungen oder ineinander integriert sein.
6.1. Messmethode
6.1.1. Der Fahrwiderstand (Straße) wird bestimmt durch:
6.1.2. Der Luftwiderstand ist im Windkanal zu messen.
6.1.3. Der Rollwiderstand und die Verluste durch den Antriebsstrang sind mit einem Flachriemen oder einem Rollenprüfstand gleichzeitig an Vorder- und Hinterachsen zu messen.
6.2. Genehmigung der Vorrichtungen durch die Genehmigungsbehörde
Die Ergebnisse der Windkanalmethode sind mit den Ergebnissen der Ausrollmethode zu vergleichen, um die Eignung der Vorrichtungen nachzuweisen, und sie sind in alle einschlägigen Prüfberichte aufzunehmen.
6.2.1. Von der Genehmigungsbehörde sind drei Fahrzeuge auszuwählen. Die Fahrzeuge müssen die Bandbreite an Fahrzeugen (z.B. Größe, Gewicht) abdecken, die mit den jeweiligen Vorrichtungen gemessen werden sollen.
6.2.2. Zwei getrennte Ausrollprüfungen sind mit jedem der drei Fahrzeuge gemäß Absatz 4.3 dieses Unteranhangs durchzuführen, die sich ergebenden Fahrwiderstandskoeffizienten (Straße) f0, f1 und f2 sind gemäß dem genannten Absatz zu bestimmen und gemäß Absatz 4.5.5 dieses Unteranhangs zu korrigieren. Das Ergebnis der Ausrollprüfung eines Prüffahrzeugs muss der arithmetische Durchschnitt der Fahrwiderstandskoeffizienten (Straße) seiner beiden getrennten Ausrollprüfungen sein. Sind mehr als zwei Ausrollprüfungen zur Erfüllung der Genehmigungskriterien der Vorrichtungen notwendig, müssen die Mittelwerte aller gültigen Prüfungen gebildet werden.
6.2.3. Es sind Messungen mit der Windkanalmethode gemäß den Absätzen 6.3 und 6.7 einschließlich dieses Unteranhangs an den selben drei Fahrzeugen, die gemäß Absatz 6.2.1 dieses Unteranhangs ausgewählt wurden, und unter den selben Bedingungen durchzuführen, und die sich ergebenden Fahrwiderstandskoeffizienten (Straße) f0, f1 und f2 sind zu bestimmen.
Entscheidet sich der Hersteller, zwei oder mehrere der im Rahmen der Windkanalmethode möglichen alternativen Verfahren zu verwenden (d. h. Absatz 6.5.2.1 über die Vorkonditionierung, die Absätze 6.5.2.2 und 6.5.2.3 über das Verfahren und Absatz 6.5.2.3.3 über die Einstellung des Prüfstands), dann sind diese Verfahren auch für die Genehmigung der Vorrichtungen zu verwenden.
6.2.4. Genehmigungskriterien
Die verwendete Vorrichtung oder Kombination von Vorrichtungen ist zu genehmigen, wenn die beiden folgenden Kriterien erfüllt sind:
εk = (Ek,WTM / Ek,coastdown) - 1
| εk | die Differenz in der Zyklusenergie in Prozent zwischen der Windkanalmethode und der Ausrollmethode über einen vollständigen WLTC-Zyklus der Klasse 3 für Fahrzeug k |
| Ek,WTM | die Zyklusenergie in J über einen vollständigen WLTC-Zyklus der Klasse 3 für Fahrzeug k, die mit dem Fahrwiderstand (Straße) berechnet wird, der sich aus der Windkanalmethode ergibt und gemäß Absatz 5 von Unteranhang 7 berechnet wird |
| Ek,coastdown | die Zyklusenergie in J über einen vollständigen WLTC-Zyklus der Klasse 3 für Fahrzeug k, die mit dem Fahrwiderstand (Straße) berechnet wird, der sich aus der Windkanalmethode ergibt und gemäß Absatz 5 von Unteranhang 7 berechnet wird und |
![]()
Die Genehmigung ist von der Genehmigungsbehörde zusammen mit den Messdaten und den betroffenen Anlagen zu dokumentieren.
Die Vorrichtung kann für längstens zwei Jahre nach der Erteilung der Genehmigung für die Bestimmung des Fahrwiderstands (Straße) verwendet werden.
Jede Kombination aus Rollenprüfstand oder Laufband und Windkanal ist einzeln zu genehmigen.
6.3. Vorbereitung des Fahrzeugs und Temperatur
Die Konditionierung und die Vorbereitung des Fahrzeugs sind gemäß den Absätzen 4.2.1 und 4.2.2 dieses Unteranhangs durchzuführen; dies gilt sowohl für Laufbandprüfstände oder Rollenprüfstande als auch für die Windkanalmessungen.
Wird das in Absatz 6.5.2.1 beschriebene alternative Aufwärmverfahren angewendet, so sind die Anpassung der Sollprüfmasse, die Wägung des Fahrzeugs und die Messung mit dem Fahrzeug ohne Fahrer durchzuführen.
Die Prüfzellen der Laufbandprüfstände oder Rollenprüfstande müssen einen Temperatursollpunkt von 20 °C mit einer Toleranz von ± 3 °C haben. Auf Antrag des Herstellers kann der Sollpunkt auch 23 °C betragen mit einer Toleranz von ± 3 °C.
6.4. Windkanalverfahren
6.4.1. Windkanalkriterien18
Die Auslegung des Windkanals, die Prüfmethoden und die Korrekturen müssen den Wert (CD × Af) besitzen, repräsentativ für den Straßenwert (CD × Af) sein und eine Präzision von 0,015 m2 aufweisen.
Für alle Messungen (CD × Af) sind die in Absatz 3.2 dieses Unteranhangs genannten Windkanalkriterien mit folgenden Änderungen einzuhalten:
6.4.2. Windkanalmessung18
Das Fahrzeug muss sich in dem in Absatz 6.3 dieses Unteranhangs beschriebenen Zustand befinden.
Das Fahrzeug ist parallel zur Längsmittellinie des Kanals mit einer Abweichung von höchstens ± 10 mm zu platzieren.
Das Fahrzeug ist mit einem Gierwinkel von 0° innerhalb einer Toleranz von ± 0,1° zu platzieren.
Der Luftwiderstand ist für mindestens 60 Sekunden und mit einer Mindestfrequenz von 5 Hz zu messen. Wahlweise kann der Widerstand mit einer Frequenz von 1 Hz und mit mindestens 300 aufeinanderfolgenden Messungen gemessen werden. Das Ergebnis muss der arithmetische Durchschnitt des Widerstands sein.
Sind am Fahrzeug bewegliche aerodynamische Karosserieteile vorhanden, so gilt Absatz 4.2.1.5 dieses Unteranhangs. Können die beweglichen Teile durch die Geschwindigkeit beeinflusst werden, dann ist jede mögliche Position im Windkanal zu messen und der Genehmigungsbehörde sind Nachweise über das Verhältnis zwischen Bezugsgeschwindigkeit, Position des beweglichen Teils und des entsprechenden (CD × Af)-Wertes vorzulegen.
6.5. Flachriemen in der Windkanalmethode
6.5.1. Kriterien für den Flachriemen
6.5.1.1. Beschreibung des Prüfstands mit Flachriemen
Die Räder müssen auf Flachriemen rollen, die die Rolleigenschaften der Räder im Vergleich zum Fahren auf der Straße nicht verändern. Die in der x-Richtung gemessenen Kräfte müssen die Reibungkräfte im Antriebsstrang berücksichtigen.
6.5.1.2 Fahrzeugrückhaltesystem
Der Prüfstand muss mit einer Zentriereinrichtung ausgerüstet sein, mit der das Fahrzeug in eine Umdrehungsposition von ± 0,5 Grad um die z-Achse gebracht wird. Das Rückhaltesystem muss die Position des zentrierten Antriebsrads während der Ausrollfahrten bei der Fahrwiderstandsbestimmung (Straße) durchgängig innerhalb der folgenden Werte halten:
6.5.1.2.1 Seitliche Position (y-Achse)
Das Fahrzeug muss in der y-Richtung bleiben und seitliche Bewegungen sind zu minimisieren.
6.5.1.2.2 Vordere und hintere Position (x-Achse)
Unbeschadet der Anforderung von Absatz 6.5.1.2.1 dieses Unteranhangs müssen sich beide Radachsen innerhalb von ± 10 mm der seitlichen Mittellinien des Riemens befinden.
6.5.1.2.3 Vertikale Kraft
Das Rückhaltesystem muss so ausgelegt sein, dass keine vertikale Kraft auf die Antriebsräder wirkt.
6.5.1.3. Genauigkeit der gemessenen Kräfte
Es ist nur die Reaktionskraft zur Drehung der Räder zu messen. Externe Kräfte dürfen nicht in das Ergebnis aufgenommen werden (z.B. Kraft des Kühlgebläses, der Fahrzeugrückhaltesysteme, aerodynamische Reaktionskräfte des Flachriemens, Verluste durch den Prüfstand)
Die Kraft in der x-Richtung ist mit einer Genauigkeit von ± 5 N zu messen.
6.5.1.4 Geschwindigkeitsregelung des Flachriemens
Die Geschwindigkeit des Flachriemens ist mit einer Genauigkeit von ± 0,1 km/h zu regeln.
6.5.1.5. Oberfläche des Flachriemens
Die Oberfläche des Flachriemens muss sauber, trocken und frei von Fremdmaterial sein, um Reifenschlupf zu vermeiden.
6.5.1.6 Kühlung18
Ein Luftstrom unterschiedlicher Geschwindigkeiten ist gegen das Fahrzeug zu leiten. Über Messgeschwindigkeiten von 5 km/h muss der Sollpunkt der linearen Luftgeschwindigkeit am Gebläseauslass der jeweiligen Prüfstandsgeschwindigkeit entsprechen. Die lineare Luftgeschwindigkeit am Gebläseauslass muss innerhalb von ± 5 km/h oder ± 10 % der jeweiligen Messgeschwindigkeit liegen, wobei der jeweils höhere Wert ausschlaggebend ist.
6.5.2. Messung des Flachriemens
Das Messverfahren kann entweder gemäß Absatz 6.5.2.2 oder Absatz 6.5.2.3 dieses Unteranhangs durchgeführt werden.
6.5.2.1. Vorkonditionierung
Das Fahrzeug ist auf dem Prüfstand gemäß den Absätzen 4.2.4.1.1 bis 4.2.4.1.3 einschließlich dieses Unteranhangs zu konditionieren.
Die Einstellung des Widerstands des Prüfstands Fd, für die Vorkonditionierung muss folgende sein:
Fd = ad + bd × v + cd × v2
Dabei ist:
ad = 0
bd = 0;
cd = (CD × Af) × (ρ0 / 2) × (1 / 3,62)
Die gleichwertige Schwungmasse des Prüfstands ist die Prüfmasse.
Der für die Einstellung des Widerstands verwendete Luftwiderstand ist Absatz 6.7.2 dieses Unteranhangs zu entnehmen und kann unmittelbar verwendet werden. Ansonsten sind ad, bd und cd aus diesem Absatz zu verwenden.
Auf Antrag des Herstellers und alternativ zu Absatz 4.2.4.1.2 dieses Unteranhangs kann das Aufwärmen durch Fahren des Fahrzeugs mit dem Flachriemen erfolgen.
In diesem Fall muss die Aufwärmgeschwindigkeit 110 % der Höchstgeschwindigkeit des anwendbaren WLTC- Zyklus betragen und die Dauer muss 1.200 Sekunden überschreiten, bis die Änderung der gemessenen Kraft während 200 Sekunden weniger als 5 N beträgt.
6.5.2.2. Messverfahren mit stabilisierten Geschwindigkeiten
6.5.2.2.1 Die Prüfung ist vom höchsten bis zum niedrigsten Geschwindigkeitsbezugspunkt durchzuführen.
6.5.2.2.2 Unmittelbar nach der Messung beim vorhergehenden Geschwindigkeitspunkt ist die Verzögerung vom derzeitigen zum folgenden anwendbaren Geschwindigkeitsbezugspunkt durch einen weichen Übergang von ungefähr 1 m/s2 durchzuführen.
6.5.2.2.3 Die Bezugsgeschwindigkeit ist für mindestens 4 Sekunden und für höchstens 10 Sekunden zu stabilisieren. Die Messausrüstung muss gewährleisten, dass das Signal der gemessenen Kraft nach dieser Dauer stabilisiert ist.
6.5.2.2.4 Die Kraft ist bei jeder Bezugsgeschwindigkeit für mindestens 6 Sekunden zu messen, wobei die Fahrzeuggeschwindigkeit konstant bleiben muss. Die sich ergebende Kraft für diesen Geschwindigkeitsbezugspunkt FjDyno muss der arithmetische Durchschnitt der Kraft während der Messung sein.
Die Schritte gemäß den Absätzen 6.5.2.2.2 bis 6.5.2.2.4 dieses Unteranhangs sind für jede Bezugsgeschwindigkeit zu wiederholen.
6.5.2.3. Messverfahren bei Verzögerung
6.5.2.3.1 Vorkonditionierung und Prüfstandseinstellungen sind gemäß Absatz 6.5.2.1 dieses Unteranhangs durchzuführen. Vor jedem Ausrollen ist das Fahrzeug für mindestens 1 Minute mit der höchsten Bezugsgeschwindigkeit oder, falls das alternative Aufwärmverfahren angewendet wird, mit 110 % der höchsten Bezugsgeschwindigkeit zu fahren. Das Fahrzeug ist anschließend auf mindestens 10 km/h über die höchste Bezugsgeschwindigkeit hinaus zu beschleunigen und das Ausrollen muss unverzüglich beginnen.
6.5.2.3.2 Die Messung ist gemäß den Absätzen 4.3.1.3.1 bis einschließlich 4.3.1.4.4 dieses Unteranhangs vorzunehmen. Ist das Ausrollen in entgegengesetzte Richtungen nicht möglich, so findet die Gleichung zur Berechnung von Δtji in Absatz 4.3.1.4.2 dieses Unteranhangs keine Anwendung. Die Messung ist nach zwei Verzögerungen zu stoppen, falls die Kraft beider Ausrollfahrten bei jedem Geschwindigkeitsbezugspunkt innerhalb von ± 10 N liegt, ansonsten sind mindestens drei Ausrollfahrten gemäß den Kriterien von Absatz 4.3.1.4.2 dieses Unteranhangs durchzuführen.
6.5.2.3.3 Die Kraft fjDyno bei jeder Bezugsgeschwindigkeit vj ist durch Entfernen der simulierten aerodynamischen Kraft zu berechnen.
![]()
Dabei ist:
| fjDecel | die beim Geschwindigkeitsbezugspunkt j gemäß der Gleichung zur Berechnung von Fj in Absatz 4.3.1.4.4 dieses Unteranhangs bestimmte Kraft in N |
| cd | der festgelegte Prüfstandskoeffizient gemäß Absatz 6.5.2.1 dieses Unteranhangs in N/(km/h)2. |
Wahlweise kann auf Antrag des Herstellers cd während des Ausrollens und zur Berechnung von fjDyno auf Null gesetzt werden.
6.5.2.4. Messbedingungen18
Das Fahrzeug muss sich in dem in Absatz 4.3.1.3.2 dieses Unteranhangs beschriebenen Zustand befinden.
6.5.3. Messergebnis bei Verwendung des Flachriemens
Das Ergebnis des Flachriemenprüfstands fjDyno wird für die weiteren Berechnungen in Absatz 6.7 dieses Unteranhangs als fj bezeichnet.
6.6. Rollenprüfstand in der Windkanalmethode
6.6.1. Kriterien
Zusätzlich zu den Beschreibungen in den Absätzen 1 und 2 von Unteranhang 5 gelten auch die in den Absätzen 6.6.1.1 bis 6.6.1.6 einschließlich dieses Unteranhangs enthaltenen Kriterien.
6.6.1.1. Beschreibung eines Rollenprüfstands18
Die Vorder- und Hinterachse müssen mit einer Einzelrolle mit einem Durchmesser von mindestens 1,2 Metern ausgerüstet sein.
6.6.1.2 Fahrzeugrückhaltesystem
Der Prüfstand muss mit einer Zentriereinrichtung für das Fahrzeug ausgerüstet sein. Das Rückhaltesystem muss die Position des zentrierten Antriebsrads während der gesamten Ausrollfahrten der Fahrwiderstandsbestimmung (Straße) innerhalb der folgenden empfohlenen Grenzen halten:
6.6.1.2.1 Fahrzeugposition
Das zu prüfende Fahrzeug ist gemäß Absatz 7.3.3 dieses Unteranhangs auf der Rolle des Rollenprüfstands einzurichten.
6.6.1.2.2 Vertikale Kraft
Das Rückhaltesystem muss die Anforderungen von Absatz 6.5.1.2.3 dieses Unteranhangs erfüllen.
6.6.1.3. Genauigkeit der gemessenen Kräfte
Die Genauigkeit der gemessenen Kräfte muss den Anforderungen von Absatz 6.5.1.3 dieses Unteranhangs genügen, mit Ausnahme der Kraft in x-Richtung, die mit der in Absatz 2.4.1 des Unteranhangs 5 beschriebenen Genauigkeit zu messen ist.
6.6.1.4 Geschwindigkeitsregelung
Die Geschwindigkeiten der Rolle sind mit einer Genauigkeit von ± 0,2 km/h zu regeln.
6.6.1.5. Oberfläche der Rolle18
Die Rollenfläche muss sauber, trocken und frei von Fremdmaterial sein, um Reifenschlupf zu vermeiden.
6.6.1.6 Kühlung
Das Kühlgebläse muss den Anforderungen von Absatz 6.5.1.6 dieses Unteranhangs genügen.
6.6.2. Prüfstandsmessungen
Die Messung muss den Anforderungen von Absatz 6.5.2 dieses Unteranhangs genügen.
6.6.3. Korrektur der auf dem Rollenprüfstand gemessenen Kräfte in Bezug zu denjenigen auf ebener Fläche18
Die auf dem Rollenprüfstand gemessenen Kräfte sind zu einem Bezugswert zu korrigieren, der der Straße (einer ebenen Fläche) entspricht; das Ergebnis wird als fj bezeichnet.

Dabei ist:
| c1 | ist der Anteil am Reifenrollwiderstand von fjDyno |
| c2 | ist ein spezifischer Radiuskorrekturfaktor für den Rollenprüfstand |
| fjDyno | ist die gemäß Absatz 6.5.2.3.3 für jede Bezugsgeschwindigkeit j berechnete Kraft in N |
| RWheel | ist die Hälfte des Nennreifendurchmessers in m |
| RDyno | ist der Radius der Rolle des Prüfstands in m. |
Auf der Grundlage des vom Hersteller vorgelegten Ergebnisses eines Korrelationstests hinsichtlich der Bandbreite an Reifenmerkmalen, die für die Prüfung auf dem Rollenprüfstand vorgesehen sind, müssen der Hersteller und die Genehmigungsbehörde einvernehmlich über die Verwendung der Faktoren c1 und c2 entscheiden.
Wahlweise kann die folgende konservative Gleichung verwendet werden:

Für C2 ist in der Regel der Wert 0,2 zu verwenden; kommt jedoch die Methode zur Fahrwiderstandsdifferenz (siehe Absatz 6.8) zur Anwendung und ist die nach Absatz 6.8.1 berechnete Fahrwiderstandsdifferenz negativ, ist für C2 der Wert 2,0 zu verwenden.
6.7. Berechnungen
6.7.1. Korrektur der Ergebnisse der Flachriemen- und Rollenprüfstände
Die gemäß den Absätzen 6.5 und 6.6 dieses Unteranhangs gemessenen Kräfte sind gemäß folgender Gleichung auf die Bezugsbedingungen hin zu korrigieren:
FDj = (fj - K1) × (1 + K0(T - 293))
Dabei ist:
| FDj | der korrigierte, auf dem Flachriemen- oder Rollenprüfstand bei der Bezugsgeschwindigkeit j gemessene Widerstand j in N |
| fj | die bei der Bezugsgeschwindigkeit j gemessene Kraft in N |
| K0 | der Korrekturfaktor für den Rollwiderstand in K-1 gemäß der Definition in Absatz 4.5.2 dieses Unteranhangs |
| K1 | die Korrektur für die Prüfmasse in N gemäß der Definition in Absatz 4.5.4 dieses Unteranhangs |
| T | die arithmetische Durchschnittstemperatur in K in der Prüfzelle während der Messung. |
6.7.2. Berechnung der aerodynamischen Kraft
Der Luftwiderstand ist gemäß folgender Gleichung zu berechnen: Ist das Fahrzeug mit beweglichen aerodynamischen Karosserieteilen, die durch die Geschwindigkeit beeinflusst werden können, ausgerüstet, so sind die entsprechenden (CD × Af)-Werte auf die betreffenden Geschwindigkeitsbezugspunkte anzuwenden.

Dabei ist:
| FAj | der im Windkanal bei der Bezugsgeschwindigkeit j gemessene Luftwiderstand in N |
| (CD × Af)j | das Produkt in m2 aus Luftwiderstandskoeffizient und der Fahrzeugfront bei einem bestimmten Geschwindigkeitsbezugspunkt j |
| ρ0 | die Trockenluftdichte in kg/m3 gemäß der Definition in Absatz 3.2.10 dieses Anhangs |
| vj | die Bezugsgeschwindigkeit j in km/h. |
6.7.3. Berechnung von Fahrwiderstandswerten (Straße)
Der gesamte Fahrwiderstand (Straße) als Summe der Ergebnisse der Absätze 6.7.1 und 6.7.2 dieses Unteranhangs ist gemäß folgender Gleichung zu berechnen:
F*j = FDj + FAj
für alle anwendbaren Geschwindigkeitsbezugspunkte j in N.
Für alle berechneten F*j sind die Koeffizienten f0, f1 und f2 in der Fahrwiderstandsgleichung (Straße) mit einer Regressionsanalyse nach der Methode der Mindestquadrate zu berechnen und als Sollkoeffizienten in Absatz 8.1.1 dieses Unteranhangs zu verwenden.
Handelt es sich bei dem nach der Windkanalmethode geprüften Fahrzeug um das repräsentative Fahrzeug einer Fahrwiderstandsmatrix-Familie (Straße), so ist der Koeffizient f1 auf Null zu setzen und die Koeffizienten f0 und f2 sind mit einer Regressionsanalyse nach der Methode der Mindestquadrate neu zu berechnen.
6.8. Methode zur Ermittlung der Fahrwiderstandsdifferenz18
Um bei der Anwendung der Interpolationsmethode Varianten mit einzubeziehen, die nicht in der Fahrwiderstandsinterpolation (d. h. Aerodynamik, Rollwiderstand und Masse) berücksichtigt sind, kann mithilfe der Methode zur Ermittlung der Fahrwiderstandsdifferenz eine Differenz der Fahrzeugreibung gemessen werden (z.B. Reibdifferenz zwischen Bremssystemen). Dazu sind folgende Schritte durchzuführen:
Diese Messungen müssen auf einem Flachriemen nach Absatz 6.5 oder auf einem Rollenprüfstand nach Absatz 6.6 durchgeführt werden, und die Korrektur der Ergebnisse (unter Ausschluss der aerodynamischen Kraft) muss nach Absatz 6.7.1 erfolgen.
Die Anwendung dieser Methode ist nur dann gestattet, wenn folgendes Kriterium erfüllt ist:
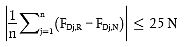
Dabei gilt:
| FDj,R | ist der korrigierte, auf dem Flachriemen- oder Rollenprüfstand gemessene Widerstand des Fahrzeugs R bei der Bezugsgeschwindigkeit j, berechnet gemäß Absatz 6.7.1 (in N) |
| FDj,N | ist der korrigierte, auf dem Flachriemen- oder Rollenprüfstand gemessene Widerstand des Fahrzeugs N bei der Bezugsgeschwindigkeit j, berechnet gemäß Absatz 6.7.1 (in N) |
| n | ist die Gesamtzahl der Geschwindigkeitspunkte |
Diese alternative Methode zur Bestimmung des Fahrwiderstands darf nur dann angewandt werden, wenn Fahrzeug R und N denselben Luftwiderstand aufweisen und wenn mit der gemessenen Differenz in geeigneter Weise der gesamte Einfluss auf den Energieverbrauch des Fahrzeugs erfasst wird. Diese Methode darf nicht angewandt werden, wenn die Gesamtgenauigkeit des absoluten Fahrwiderstands von Fahrzeug N in irgendeiner Weise beeinträchtigt ist.
6.8.1. Bestimmung der Differenz der Flachriemen- oder Rollenprüfstandskoeffizienten18
Die Fahrwiderstandsdifferenz wird anhand folgender Gleichung berechnet:
FDj, Delta = FDj,N - FDj,R
Dabei gilt:
| FDj, Delta | ist die Fahrwiderstandsdifferenz bei der Bezugsgeschwindigkeit j (in N) |
| FDj,N | ist der korrigierte, auf dem Flachriemen- oder Rollenprüfstand gemessene Widerstand bei der Bezugsgeschwindigkeit j, berechnet gemäß Absatz 6.7.1 für Fahrzeug N (in N) |
| FDj,R | ist der korrigierte, auf dem Flachriemen- oder Rollenprüfstand gemessene Widerstand des repräsentativen Fahrzeugs bei der Bezugsgeschwindigkeit j, berechnet gemäß Absatz 6.7.1 für das repräsentative Fahrzeug R (in N) |
Für alle berechneten Werte für FDj, Delta müssen die Koeffizienten f0, Delta, f1, Delta und f2, Delta in der Fahrwiderstandsgleichung mit einer Regressionsanalyse nach der Methode der kleinsten Quadrate berechnet werden.
6.8.2. Ermittlung des Gesamtfahrwiderstands18
Wird die Interpolationsmethode (siehe Absatz 3.2.3.2. des Unteranhangs 7) nicht angewandt, muss die Fahrwiderstandsdifferenz für Fahrzeug N anhand folgender Gleichungen berechnet werden:
f0,N = f0,R + f0, Delta
f1,N = f1,R + f1, Delta
f2,N = f2,R + f2, Delta
Dabei gilt:
| N | bezieht sich auf die Fahrwiderstandskoeffizienten von Fahrzeug N |
| R | bezieht sich auf die Fahrwiderstandskoeffizienten des repräsentativen Fahrzeugs R |
| Delta | bezieht sich auf die in Absatz 6.8.1 bestimmte Differenz der Fahrwiderstandskoeffizienten"; |
7. Übertragung des Fahrwiderstands (Straße) auf einen Rollenprüfstand
7.1. Vorbereitung der Prüfung auf dem Rollenprüfstand
7.1.0. Auswahl des Prüfstandbetriebs18
Die Prüfung muss auf einem Prüfstand erfolgen, der entweder im 2-Rad-Betrieb oder im 4-Rad-Betrieb arbeitet (siehe Absatz 2.4.2.4 des Unteranhangs 6).
7.1.1. Laborbedingungen
7.1.1.1. Rolle(n)18
Die Oberfläche der Rolle(n) des Prüfstands muss sauber, trocken und frei von Fremdmaterial sein, um Reifenschlupf zu vermeiden. Der Prüfstand ist in denselben Gängen zu betreiben wie in der folgenden Prüfung Typ 1. Die Geschwindigkeit des Rollenprüfstands ist an der Rolle zu messen, die mit der Einheit verbunden ist, die die Kraft aufnimmt.
7.1.1.1.1 Reifenschlupf
Es kann zusätzliches Gewicht am oder im Fahrzeug angebracht werden, um Reifenschlupf zu vermeiden. Die Einstellung des Widerstands am Rollenprüfstand ist vom Hersteller mit dem Zusatzgewicht durchzuführen. Das Zusatzgewicht ist sowohl bei der Einstellung des Fahrwiderstands als auch bei den Emissions- und Kraftstoffverbrauchsprüfungen zu verwenden Die Verwendung eines Zusatzgewichts ist in alle einschlägigen Prüfblätter aufzunehmen.
7.1.1.2. Raumtemperatur
Die Umgebungstemperatur des Prüflabors muss bei dem festgelegten Wert von 23 °C liegen und darf davon während der Prüfung um nicht mehr als ± 5 °C abweichen, es sei denn, dies ist aufgrund einer darauf folgenden Prüfung erforderlich.
7.2. Vorbereitung eines Rollenprüfstands
7.2.1. Einstellung der Schwungmasse
Die gleichwertige Schwungmasse des Rollenprüfstands ist gemäß Absatz 2.5.3 dieses Unteranhangs einzustellen. Kann der Rollenprüfstand die Schwungmasseneinstellung nicht exakt einhalten, so ist die nächsthöhere Schwungmasseneinstellung mit einer maximalen Steigerung von 10 kg zu verwenden.
7.2.2. Aufwärmen des Rollenprüfstands
Der Rollenprüfstand ist gemäß den Empfehlungen des Herstellers des Rollenprüfstands oder in anderer geeigneter Weise aufzuwärmen, so dass sich die Reibungsverluste des Prüfstands stabilisieren.
7.3. Vorbereitung des Fahrzeugs
7.3.1. Reifendruckregelung
Der Reifendruck darf, wenn die Abstelltemperatur einer Prüfung Typ 1 erreicht ist, auf nicht mehr als 50 % über dem unteren Grenzwert des Reifendruckbereichs für den ausgewählten Reifen gemäß den Spezifikationen des Herstellers (siehe Absatz 4.2.2.3 dieses Unteranhangs) eingestellt werden und er ist in alle einschlägigen Prüfberichte aufzunehmen.
7.3.2. Können die in Absatz 8.1.3 beschriebenen Kriterien bei der Bestimmung der Einstellungen des Rollenprüfstands aufgrund nichtreproduzierbarer Kräfte nicht erfüllt werden, so ist das Fahrzeug mit einem Fahrzeug-Ausrollmodus auszurüsten. Der Ausrollmodus muss von der Genehmigungsbehörde genehmigt werden und die Verwendung eines solchen ist in allen einschlägigen Prüfberichten festzuhalten.
Ist ein Fahrzeug mit einem Fahrzeug-Ausrollmodus ausgerüstet, so ist dieser sowohl während der Bestimmung des Fahrwiderstands als auch auf dem Rollenprüfstand zu aktivieren.
7.3.2.1. - gestrichen -18
7.3.3. Einrichtung des Fahrzeugs auf dem Prüfstand18
Das zu prüfende Fahrzeug ist in einer exakt nach vorne gerichteten Position auf dem Rollenprüfstand zu platzieren und dort zu sichern. Wird ein Rollenprüfstand mit nur einer Rolle verwendet, so muss sich der Mittelpunkt der Reifenkontaktfläche auf der Rolle, von oben gesehen, innerhalb von ± 25 mm oder ± 2 % des Rollendurchmessers befinden, wobei der jeweils niedrigere Wert ausschlaggebend ist.
Wird die Methode der Drehmomentmessung angewandt, so ist der Reifendruck so anzupassen, dass der dynamische Radius innerhalb von 0,5 % des dynamischen Radius rj liegt, der anhand der Gleichungen in Absatz 4.4.3.1 am Geschwindigkeitsbezugspunkt bei 80 km/h berechnet wird. Der dynamische Radius auf dem Rollenprüfstand muss entsprechend dem in Absatz 4.4.3.1 beschriebenen Verfahren berechnet werden.
Liegt diese Anpassung außerhalb des in Absatz 7.3.1 festgelegten Bereichs, darf die Methode der Drehmomentmessung nicht angewandt werden.
7.3.3.1. [frei gelassen]18
7.3.4. Aufwärmen des Fahrzeugs
7.3.4.1. Das Fahrzeug ist gemäß dem anwendbaren WLTC-Zyklus aufzuwärmen.
7.3.4.2. Ist das Fahrzeug bereits aufgewärmt, dann muss die WLTC-Phase gemäß Absatz 7.3.4.1 dieses Unteranhangs mit der höchsten Geschwindigkeit gefahren werden.
7.3.4.3 Alternatives Aufwärmverfahren
7.3.4.3.1 Auf Antrag des Fahrzeugherstellers und mit Genehmigung der Genehmigungsbehörde kann ein alternatives Aufwärmverfahren angewendet werden. Das genehmigte alternative Aufwärmverfahren kann für Fahrzeuge innerhalb derselben Fahrwiderstandsfamilie (Straße) angewendet werden und es muss den in den Absätzen 7.3.4.3.2 bis 7.3.4.3.5 dieses Unteranhangs enthaltenen Anforderungen genügen.
7.3.4.3.2 Es ist mindestens ein für die Fahrwiderstandsfamilie (Straße) repräsentatives Fahrzeug auszuwählen.
7.3.4.3.3 Der Zyklusenergiebedarf, der gemäß Absatz 5 des Unteranhangs 7 mit den korrigierten Fahrwiderstandskoeffizienten (Straße) f0a, f1a und f2a für das alternative Aufwärmverfahren berechnet wurde, muss mindestens so hoch sein, wie der Zyklusenergiebedarf, der mit den Sollfahrwiderstandskoeffizienten (Straße) f0, f1, und f2 für jede anwendbare Phase berechnet wurde.
Die korrigierten Fahrwiderstandskoeffizienten (Straße) f0a, f1a und f2a sind gemäß folgender Gleichung zu berechnen:
f0a = f0 + Ad_alt - Ad_WLTC
f1a = f1 + Bd_alt - Bd_WLTC
f2a = f2 + Cd_alt - Cd_WLTC
Dabei sind:
| Ad_alt, Bd_alt und Cd_alt | die Koeffizienten der Einstellung des Rollenprüfstands nach dem alternativen Aufwärmverfahren |
| Ad_WLTC, Bd_WLTC und Cd_WLTC | die Koeffizienten der Einstellung des Rollenprüfstands nach dem in Absatz 7.3.4.1 dieses Unteranhangs beschriebenen WLTC-Aufwärmverfahrens und eine gültige Einstellung des Rollenprüfstands gemäß Absatz 8 dieses Unteranhangs. |
7.3.4.3.4 Die korrigierten Fahrwiderstandskoeffizienten (Straße) f0a, f1a und f2a dürfen nur für die Zwecke von Absatz 7.3.4.3.3 dieses Unteranhangs verwendet werden. Für andere Zwecke sind die Sollfahrwiderstandskoeffizienten (Straße) f0, f1 und f2 als Sollfahrwiderstandskoeffizienten (Straße) zu verwenden.
7.3.4.3.5 Einzelheiten zum Verfahren und seiner Gleichwertigkeit sind der Genehmigungsbehörde vorzulegen.
8. Einstellung des Widerstands des Rollenprüfstands
8.1. Einstellung des Widerstands des Rollenprüfstands bei Verwendung der Ausrollmethode
Diese Methode ist anwendbar, wenn die Fahrwiderstandskoeffizienten (Straße) f0, f1 und f2 bestimmt wurden.
Bei einer Fahrwiderstandsmatrix-Familie (Straße) ist diese Methode anzuwenden, wenn der Fahrwiderstand (Straße) des repräsentativen Fahrzeugs mit der in Absatz 4.3 dieses Unteranhangs beschriebenen Ausrollmethode bestimmt wird. Die Werte des Sollfahrwiderstands (Straße) sind die nach der Methode gemäß Absatz 5.1 dieses Unteranhangs berechneten Werte.
8.1.1. Anfängliche Einstellung des Widerstands18
Bei einem Rollenprüfstand mit Koeffizientensteuerung ist die Kraftaufnahmeeinheit mit den willkürlichen anfänglichen Koeffizienten Ad, Bd und Cd der folgenden Gleichung anzupassen:
Fd = Ad + Bdv + Cdv2
Dabei ist:
Fd der eingestellte Widerstand des Rollenprüfstands in N
v die Geschwindigkeit der Rolle des Rollenprüfstands in km/h.
Die folgenden Koeffizienten werden für die anfängliche Einstellung des Widerstands empfohlen:
für einachsige Rollenprüfstände oder
Ad = 0,5 × At, Bd = 0,2 × Bt, Cd = Ct
für zweiachsige Rollenprüfstände, wobei At, Bt und Ct die Sollfahrwiderstandskoeffizienten (Straße) sind
Bei einem Rollenprüfstand mit polygonaler Kontrolle sind in der Kraftaufnahmeeinheit des Rollenprüfstands geeignete Widerstandswerte bei jeder Bezugsgeschwindigkeit zu setzen.
8.1.2. Ausrollen
Die Ausrollprüfung auf dem Rollenprüfstand ist gemäß dem in Absatz 8.1.3.4.1 oder in Absatz 8.1.3.4.2 dieses Unteranhangs genannten Verfahren durchzuführen und darf nicht später als 120 Sekunden nach Beendigung des Aufwärmverfahrens beginnen. Aufeinanderfolgende Ausrollfahrten müssen unmittelbar beginnen. Auf Antrag des Herstellers und mit Genehmigung der Genehmigungsbehörde kann die Zeit zwischen dem Aufwärmverfahren und dem Ausrollen unter Verwendung der iterativen Methode verlängert werden, um eine korrekte Fahrzeugeinstellung für das Ausrollen zu gewährleisten. Der Hersteller muss der Genehmigungsbehörde nachweisen, dass die Parameter für die Einstellung des Widerstands des Rollenprüfstands (z.B. Kühlmittel- und/oder Öltemperatur, Kraft auf einem Prüfstand) nicht beeinflusst werden.
8.1.3. Überprüfung
8.1.3.1. Der Wert des Sollfahrwiderstands (Straße) ist mit dem Sollfahrwiderstandskoeffizienten (Straße) At, Bt und Ct, für jede Bezugsgeschwindigkeit vj zu berechnen:
![]()
Dabei ist/sind:
At, Bt und Ct sind die Sollfahrwiderstandsparameter
Ftj der bei der Bezugsgeschwindigkeit vj gemessene Sollfahrwiderstand (Straße) in N
vj die j-te Bezugsgeschwindigkeit in km/h.
8.1.3.2. Der gemessene Fahrwiderstand (Straße) wird mit folgender Gleichung berechnet:
Dabei ist:
| Fmj | der bei jeder Bezugsgeschwindigkeit vj, gemessene Fahrwiderstand (Straße) in N |
| TM | die Prüfmasse des Fahrzeugs in kg |
| mr | die gleichwertige effektive Masse der rotierenden Bauteile in kg gemäß Absatz 2.5.1 dieses Unteranhangs |
| j | die Ausrollzeit in s entsprechend der Geschwindigkeit vj. |
8.1.3.3. Der auf dem Rollenprüfstand simulierte Fahrwiderstand ist gemäß der in Absatz 4.3.1.4 angegebenen Methode zu berechnen, mit Ausnahme der Messungen in entgegengesetzten Richtungen:
Fs = As + Bs× v + Cs× v2
Der simulierte Fahrwiderstand (Straße) für jede Bezugsgeschwindigkeit vj ist mit der folgenden Gleichung und unter Verwendung der berechneten As, Bs und Cs zu bestimmen:
![]()
8.1.3.4. Für die Einstellung des Widerstands des Rollenprüfstands können zwei unterschiedliche Methoden angewendet werden. Wird das Fahrzeug durch den Prüfstand beschleunigt, so sind die in Absatz 8.1.3.4.1 dieses Unteranhangs beschriebenen Methoden anzuwenden. Wird das Fahrzeug durch seinen eigenen Antrieb beschleunigt, so sind die in den Absätzen 8.1.3.4.1 oder 8.1.3.4.2 dieses Unteranhangs beschriebenen Methoden anzuwenden. Die mit der Geschwindigkeit multiplizierte Mindestbeschleunigung muss 6 m2/sec3 betragen. Fahrzeuge, die 6 m2/s3 nicht erreichen können, müssen mit voll betätigtem Beschleunigungsregler gefahren werden.
8.1.3.4.1 Prüffahrt mit festen Einstellwerten
8.1.3.4.1.1 Die Prüfstandssoftware führt insgesamt vier Ausrollfahrten durch: Ausgehend von der ersten Ausrollfahrt sind die Koeffizienten der Prüfstandseinstellung für die zweite Fahrt gemäß Absatz 8.1.4 dieses Unteranhangs zu berechnen. Nach dem ersten Ausrollen muss die Software drei zusätzliche Ausrollfahrten entweder mit den festgelegten Koeffizienten der Prüfstandseinstellung, die nach dem ersten Ausrollen bestimmt wurden, oder mit den gemäß Absatz 8.1.4 dieses Unteranhangs angepassten Koeffizienten der Prüfstandseinstellung durchführen.
8.1.3.4.1.2 Die endgültigen Koeffizienten A, B und C der Prüfstandseinstellung sind gemäß folgenden Gleichungen zu berechnen:

Dabei ist/sind:
| At, Bt und Ct | sind die Sollfahrwiderstandsparameter |
| Asn, Bsn und Csn | die simulierten Fahrwiderstandskoeffizienten (Straße) der n-ten Fahrt |
| Adn, Bdn und Cdn | die Koeffizienten der Prüfstandseinstellung der n-ten Fahrt |
| n | die Kennziffer der Ausrollfahrten einschließlich der ersten Stabilisierungsfahrt. |
8.1.3.4.2 Iterative Methode
Die berechneten Kräfte in den jeweiligen Geschwindigkeitsbereichen müssen bei zwei aufeinanderfolgenden Ausrollfahrten nach einer Regressionsanalyse nach der Methode der kleinsten Quadrate in Bezug auf die Kräfte entweder innerhalb von ± 10 N der Sollwerte liegen, oder es müssen nach der gemäß Absatz 8.1.4 durchgeführten Anpassung der Einstellung des Widerstands des Rollenprüfstands zusätzliche Ausrollfahrten erfolgen.
8.1.4. Anpassung
Der eingestellte Widerstand des Rollenprüfstands ist gemäß folgenden Gleichungen anzupassen:
Daraus folgt:

Dabei ist:
| Fdj | der anfänglich eingestellte Widerstand des Rollenprüfstands in N |
| F*dj | der angepasste Widerstand des Rollenprüfstands in N |
| Fj | der angepasste Fahrwiderstand (Straße) gleich (Fsj - Ftj) in N |
| Fsj | der bei der Bezugsgeschwindigkeit vj simulierte Fahrwiderstand (Straße) in N |
| Ftj | der Sollfahrwiderstand (Straße) bei der Bezugsgeschwindigkeit vj in N |
| A*d, B*d und C*d | die neuen Koeffizienten der Rollenprüfstandseinstellung. |
8.1.5. At, Bt und Ct sind als Endwerte für f0, f1 und f2 und zu folgenden Zwecken zu verwenden:
8.2. Einstellung des Widerstands des Rollenprüfstands bei Verwendung der Drehmomentmessung
Diese Methode wird angewendet, wenn der Fahrwiderstand unter Verwendung der in Absatz 4.4 dieses Unteranhangs beschriebenen Drehmomentmessung bestimmt wird.
Bei einer Straßenfahrwiderstandsmatrix-Familie (Straße) ist diese Methode anzuwenden, wenn der Fahrwiderstand des repräsentativen Fahrzeugs mit der in Absatz 4.4 dieses Unteranhangs beschriebenen Drehmomentmessung bestimmt wird. Die Werte des Sollfahrwiderstands sind die nach der Methode gemäß Absatz 5.1 dieses Unteranhangs berechneten Werte.
8.2.1. Anfängliche Einstellung des Widerstands
Bei einem Rollenprüfstand mit Koeffizientensteuerung ist die Kraftaufnahmeeinheit mit den willkürlichen anfänglichen Koeffizienten Ad, Bd und Cd der folgenden Gleichung anzupassen:
Fd = Ad + Bdv + Cdv2
Dabei ist:
Fd der eingestellte Widerstand des Rollenprüfstands in N
v die Geschwindigkeit der Rolle des Rollenprüfstands in km/h.
Die folgenden Koeffizienten werden für die anfängliche Einstellung des Widerstands empfohlen:
für einachsige Rollenprüfstände oder![]()
für zweiachsige Rollenprüfstände wobei:
at, bt und ct die Sollfahrwiderstandskoeffizienten sind und
r' der bei 80 km/h erreichte dynamische Radius des Reifens auf dem Rollenprüfstand in m oder
Bei einem Rollenprüfstand mit polygonaler Kontrolle sind in der Kraftaufnahmeeinheit des Rollenprüfstands geeignete Widerstandswerte bei jeder Bezugsgeschwindigkeit zu setzen.
8.2.2. Raddrehmomentsmessung
Die Drehmomentmessungsprüfung auf dem Rollenprüfstand ist gemäß dem in Absatz 4.4.2 dieses Unteranhangs beschriebenen Verfahren durchzuführen. Die Drehmomentmesser müssen mit den in der vorangehenden Straßenprüfung verwendeten identisch sein.
8.2.3. Überprüfung
8.2.3.1. Die Sollfahrwiderstands(Drehmoment)kurve ist mit der Gleichung in Absatz 4.5.5.2.1 dieses Unteranhangs zu bestimmen und kann folgendermaßen geschrieben werden:
![]()
8.2.3.2. Die simulierte Fahrwiderstands(Drehmoment)kurve ist gemäß der beschriebenen Methode und der in Absatz 4.4.3.2 dieses Unteranhangs angegebenen Messgenauigkeit, und gemäß der in Absatz 4.4.4 dieses Unteranhangs beschriebenen Bestimmung der Fahrwiderstands(Drehmoment)kurve sowie den anwendbaren Korrekturen gemäß Absatz 4.5 dieses Unteranhangs zu berechnen, ohne jedoch in entgegengesetzten Richtungen zu messen; daraus ergibt sich die folgende simulierte Fahrwiderstandskurve:
![]()
Der simulierte Fahrwiderstand (Drehmoment) muss innerhalb einer Toleranz von ± 10 Nxr' des Sollfahrwiderstands bei jedem Geschwindigkeitsbezugspunkt liegen, wobei r' der dynamische, bei 80 km/h erreichte Radius des Reifens auf dem Rollenprüfstand in Metern ist.
Erfüllt die Toleranz bei einer beliebigen Bezugsgeschwindigkeit nicht das Kriterium der in diesem Absatz beschriebenen Methode, so ist das in Absatz 8.2.3.3 dieses Unteranhangs genannte Verfahren zur Anpassung der Einstellung des Widerstands des Rollenprüfstands anzuwenden.
8.2.3.3. Einstellung18
Die Einstellung des Widerstands des Rollenprüfstands wird mit folgender Gleichung vorgenommen:
Daraus folgt:

Dabei gilt:
| F*dj | ist der neu eingestellte Widerstand des Rollenprüfstands (in N) |
| Fej | ist der angepasste Fahrwiderstand gleich (Fsj - Ftj) (in Nm) |
| Fsj | ist der bei der Bezugsgeschwindigkeit vj simulierte Fahrwiderstand (in Nm) |
| Ftj | ist der Sollfahrwiderstand bei der Bezugsgeschwindigkeit vj (in Nm) |
| A*d, B*d und C*d | sind die neuen Koeffizienten der Rollenprüfstandseinstellung |
| r´ | ist der bei 80 km/h erreichte dynamische Radius des Reifens auf dem Rollenprüfstand in m. |
Die Absätze 8.2.2 und 8.2.3 sind so lange zu wiederholen, bis die Toleranz laut Absatz 8.2.3.2 erreicht ist.
8.2.3.4. Die Masse der Antriebsachse(n), die Reifenspezifikationen und die Einstellung des Widerstands des Rollenprüfstands sind in allen einschlägigen Prüfberichten zu berücksichtigen, wenn die Anforderung von Absatz 8.2.3.2 dieses Unteranhangs erfüllt ist.
8.2.4. Umwandlung der Fahrwiderstandskoeffizienten in Fahrwiderstandskoeffizienten (Straße) f0, f1, f2
8.2.4.1 Erfolgt das Ausrollen des Fahrzeugs in einer nicht wiederholbaren Weise und ist ein Ausrollmodus gemäß Absatz 4.2.1.8.5 nicht durchführbar, so sind die Koeffizienten f0, f1 und f2 in der Fahrwiderstandsgleichung anhand der Gleichungen in Absatz 8.2.4.1.1 zu berechnen. In allen anderen Fällen ist das in den Absätzen 8.2.4.2 bis 8.2.4.4 beschriebene Verfahren durchzuführen.
Dabei ist/sind:
| c0, c1, c2 | die Fahrwiderstandskoeffizienten gemäß Absatz 4.4.4 dieses Unteranhangs in Nm, Nm/(km/h), Nm/(km/h)2 |
| r | der dynamische Reifenradius des Fahrzeugs, mit dem der Fahrwiderstand bestimmt wurde, in m. |
| 1,02 | ein approximativer Koeffizient zum Ausgleich von Verlusten im Antriebsstrang. |
8.2.4.1.2 Die ermittelten Werte f0, f1, f2 dürfen nicht für eine Rollenprüfstandseinstellung oder für Emissions- oder Reichweitenprüfungen verwendet werden. Sie sind nur in den folgenden Fällen zu verwenden:
8.2.4.2. Wenn der Rollenprüfstand innerhalb der angegebenen Toleranzen eingestellt worden ist, ist ein Ausrollverfahren auf dem Rollenprüfstand gemäß Absatz 4.3.1.3 dieses Unteranhangs durchzuführen. Die Ausrollzeiten sind in allen einschlägigen Prüfblättern zu berücksichtigen.
8.2.4.3 Der Fahrwiderstand (Straße) Fj bei der Bezugsgeschwindigkeit vj in N ist gemäß folgender Gleichung zu bestimmen:
Dabei ist:
| Fj | der Fahrwiderstand (Straße) bei der Bezugsgeschwindigkeit vj in N |
| TM | die Prüfmasse des Fahrzeugs in kg |
| mr | die gleichwertige effektive Masse der rotierenden Bauteile in kg gemäß Absatz 2.5.1 dieses Unteranhangs |
| Δv | = 10 km/h |
| Δtj | die Ausrollzeit in s entsprechend der Geschwindigkeit vj. |
8.2.4.4. Die Koeffizienten f0, f1 und f2 in der Fahrwiderstandsgleichung (Straße) sind mit einer Regressionsanalyse nach der Methode der Mindestquadrate über den ganzen Bezugsgeschwindigkeitsbereich zu berechnen.
| Prüfausrüstung und Kalibrierungen | Unteranhang 518 |
1. Spezifikationen und Einstellungen des Prüfstands
1.1. Spezifikationen des Kühlgebläses
1.1.1. Ein Luftstrom unterschiedlicher Geschwindigkeiten ist gegen das Fahrzeug zu leiten. Über Rollengeschwindigkeiten von 5 km/h muss der Sollpunkt der linearen Luftgeschwindigkeit am Gebläseauslass der jeweiligen Rollengeschwindigkeit entsprechen. Die lineare Luftgeschwindigkeit am Gebläseauslass muss innerhalb von ± 5 km/h oder ± 10 % der jeweiligen Rollengeschwindigkeit liegen, wobei der jeweils höhere Wert ausschlaggebend ist.
1.1.2. Die oben genannte Luftgeschwindigkeit ist als gemittelter Wert einer Reihe von Messpunkten zu bestimmen, die:
Abbildung A5/1 Gebläse mit rechteckigem Auslass

Abbildung A5/2 Gebläse mit kreisförmigem Auslass

Bei diesen Messungen darf sich weder ein Fahrzeug noch eine sonstige Verdeckung vor dem Gebläse befinden. Das Gerät zur Messung der linearen Luftaustrittsgeschwindigkeit muss sich in einer Entfernung von 0 bis 20 cm von der Auslassöffnung befinden.
1.1.3. Der Auslass muss folgende Merkmale aufweisen:
1.1.4. Die Lage des Gebläses muss folgende sein:
1.1.5. Auf Antrag des Herstellers und bei entsprechender Billigung durch die Genehmigungsbehörde können Änderungen an der Höhe des Kühlventilators, an seiner seitlichen Lage und an seinem Abstand vom Fahrzeug vorgenommen werden.
Sollte die angegebene Ventilatorkonfiguration für bestimmte Fahrzeugausführungen unzweckmäßig sein, wie etwa bei Fahrzeugen mit Heckmotor oder seitlichen Ansaugstutzen, oder wenn für einen internen Betrieb keine ausreichende Kühlung gegeben ist, können auf Antrag des Herstellers und bei entsprechender Billigung durch die Genehmigungsbehörde Änderungen an der Höhe und an der Leistung des Kühlventilators sowie an seiner Position in Längsrichtung und seiner seitlichen Lage vorgenommen werden; zudem können zusätzliche Ventilatoren mit abweichenden Leistungsdaten (darunter solche mit konstanter Drehzahl) eingesetzt werden.
1.1.6. In den in Absatz 1.1.5 beschriebenen Fällen müssen Lage und Leistung des Kühlventilators/der Kühlventilatoren sowie die Einzelheiten zu der der Genehmigungsbehörde vorgelegten Begründung in allen einschlägigen Prüfberichten festgehalten werden. Für nachfolgende Prüfungen sind unter Berücksichtigung der Begründung eine ähnliche Lage und vergleichbare Leistungsdaten zu verwenden, um Kühlmerkmale auszuschließen, die als nicht repräsentativ gelten.
2. Rollenprüfstand
2.1. Allgemeine Anforderungen
2.1.1. Der Rollenprüfstand muss dazu geeignet sein, den Fahrwiderstand auf der Straße mit drei Fahrwiderstandskoeffizienten (Straße) zu simulieren; die Koeffizienten müssen an die Widerstandskurve angepasst werden können.
2.1.2. Der Rollenprüfstand kann über eine oder zwei Rollen verfügen. Werden Rollenprüfstände mit zwei Rollen verwendet, so müssen die Rollen dauerhaft gekuppelt sein oder die vordere Rolle muss direkt oder indirekt vorhandene Schwungmassen und die Kraftaufnahmeeinheit antreiben.
2.2. Besondere Anforderungen
Die folgenden besonderen Anforderungen beziehen sich auf die Spezifikationen des Herstellers des Rollenprüfstands.
2.2.1. Die Rundlaufabweichung der Rolle muss an allen gemessenen Stellen weniger als 0,25 mm betragen.
2.2.2. Der Rollendurchmesser muss an allen Messstellen innerhalb von ± 1,0 mm des spezifizierten Nennwertes liegen.
2.2.3. Der Prüfstand muss über ein Zeitmesssystem zur Bestimmung der Beschleunigung und zur Messung der Fahrzeug-/Prüfstand-Ausrollzeiten verfügen. Das Zeitmesssystem muss eine Genauigkeit von mindestens ± 0,001 Prozent besitzen. Dies ist bei der Erstinstallation zu überprüfen.
2.2.4. Der Prüfstand muss über ein Geschwindigkeitsmesssystem mit einer Genauigkeit von mindestens ± 0,080 km/h verfügen. Dies ist bei der Erstinstallation zu überprüfen.
2.2.5. Der Prüfstand muss eine Ansprechzeit (90 Prozent-Reaktion auf einen Zugkraft-Stufenwechsel) von weniger als 100 s aufweisen, wobei Spontanbeschleunigungen mindestens 3 m/s2 betragen müssen. Dies ist bei der Erstinstallation und nach umfangreichen Wartungstätigkeiten zu überprüfen.
2.2.6. Die grundlegende Trägheit des Prüfstands ist vom Hersteller des Prüfstands anzugeben und muss innerhalb von ± 0,5 Prozent für jede gemessene Basisträgheit und ± 0,2 Prozent relativ zu jedem arithmetischen Wert durch dynamische Ableitung bei Versuchen bei konstanter Beschleunigung, Verzögerung und Kraft bestätigt werden.
2.2.7. Die Rollengeschwindigkeit ist mit einer Frequenz von mindestens 10 Hz zu messen.
2.3. Zusätzliche besondere Anforderungen an einen Rollenprüfstand im 4-Rad-Betrieb18
2.3.1. Die 4-Rad-Steuerung des Prüfstands muss so ausgelegt sein, dass die folgenden Anforderungen erfüllt sind, wenn ein Fahrzeug über den WLTC-Zyklus geprüft wird.
2.3.1.1. Die Simulation des Fahrwiderstands auf der Straße ist so durchzuführen, dass der Prüfstand im 4-Rad-Betrieb die gleiche proportionale Verteilung der Kräfte reproduziert wie auf einer glatten, trockenen und ebenen Straßenoberfläche.
2.3.1.2 Bei der Erstinstallation und nach umfangreichen Wartungstätigkeiten müssen die Anforderungen von Absatz 2.3.1.2.1 dieses Unteranhangs und entweder von Absatz 2.3.1.2.2 oder 2.3.1.2.3 dieses Unteranhangs erfüllt sein. Die Geschwindigkeitsdifferenz zwischen der vorderen und der hinteren Rolle wird durch die Anwendung eines 1-Sekunden-Mittelungsfilters auf die mit einer Mindestfrequenz von 20 Hz erhaltenen Geschwindigkeitsdaten der Rolle bewertet.
2.3.1.2.1 Die Differenz der zurückgelegten Strecken zwischen der vorderen und der hinteren Rolle muss weniger als 0,2 % der über den WLTC-Zyklus gefahrenen Strecke betragen. Die absolute Zahl ist in die Berechnung der Gesamtstreckendifferenz über den WLTC zu integrieren.
2.3.1.2.2 Die Differenz der zurückgelegten Strecken zwischen der vorderen und der hinteren Rolle muss weniger als 0,1 m in jedem einzelnen 200 ms-Zeitabschnitt betragen.
2.3.1.2.3 Die Geschwindigkeitsdifferenz aller Rollen muss innerhalb von +/- 0,16 km/h liegen.
2.4. Kalibrierung des Rollenprüfstands
2.4.1. Kraftmesssystem18
Die Genauigkeit der Kraftmesseinheit muss bei allen Messschritten mindestens ±10 N betragen. Dies ist bei der Erstinstallation, nach umfangreichen Wartungstätigkeiten und innerhalb von 370 Tagen vor einer Prüfung zu überprüfen.
2.4.2. Verluste bei der Kalibrierung des Rollenprüfstands
Die Verluste des Rollenprüfstands sind zu messen und zu aktualisieren, falls ein Messwert um mehr als 9,0 N von der aktuellen Verlustkurve abweicht. Dies ist bei der Erstinstallation, nach umfangreichen Wartungstätigkeiten und innerhalb von 35 Tagen vor einer Prüfung zu überprüfen.
2.4.3. Überprüfung der Simulation des Fahrwiderstands auf der Straße ohne Fahrzeug
Die Leistung des Rollenprüfstands ist bei der Erstinstallation, nach umfangreichen Wartungstätigkeiten und innerhalb von 7 Tagen vor einer Prüfung durch Ausrollen in unbeladenem Zustand zu überprüfen. Der Fehlerfaktor des arithmetischen Durchschnitts der Ausrollkraft muss bei jedem Geschwindigkeitsbezugspunkt weniger als 10 N oder 2 % betragen, je nachdem, welcher Wert höher ist.
3. Abgasverdünnungssystem
3.1. Spezifikation des Systems
3.1.1. Überblick
3.1.1.1. Es ist ein Vollstrom-Abgasverdünnungssystem zu verwenden. Die gesamten Fahrzeugabgase sind unter kontrollierten Bedingungen und unter Verwendung einer Probenahmeeinrichtung mit konstantem Volumen kontinuierlich mit Umgebungsluft zu verdünnen. Es dürfen ein kritisch durchströmtes Venturi-Rohr oder mehrere parallel angeordnete kritisch durchströmte Venturi-Rohre, eine Verdrängerpumpe, ein subsonisches Venturi-Rohr oder ein Ultraschalldurchsatzmesser verwendet werden. Das Gesamtvolumen des Gemisches aus Abgas und Verdünnungsluft ist zu messen und eine kontinuierlich proportionale Probe des Volumens ist für die Analyse zu entnehmen. Die Mengen an Abgasverbindungen sind anhand der Probenkonzentrationen zu bestimmen und um ihren jeweiligen Anteil an Verdünnungsluft und um den gesamten Durchsatz über den Prüfzeitraum zu korrigieren.
3.1.1.2 Das Abgasverdünnungssystem besteht aus einem Verbindungsrohr, einer Mischvorrichtung, einem Verdünnungstunnel, einer Vorrichtung zur Verdünnungsluftkonditionierung, einer Ansaugvorrichtung und einem Durchflussmesser. Probenahmesonden sind im Verdünnungstunnel gemäß den Absätzen 4.1, 4.2 und 4.3 dieses Unteranhangs anzubringen.
3.1.1.3. Die Mischvorrichtung nach Absatz 3.1.1.2 dieses Unteranhangs muss ein Behälter gemäß der Abbildung A5/3 sein, in dem die Fahrzeugabgase und die Verdünnungsluft so kombiniert werden, dass an der Entnahmestelle ein homogenes Gemisch entsteht.
3.2. Allgemeine Anforderungen
3.2.1. Die Fahrzeugabgase sind mit einer ausreichenden Menge an Umgebungsluft zu verdünnen, um jegliche Wasserkondensation im Probenahme- und Messsystem bei allen während der Prüfung auftretenden Bedingungen zu verhindern.
3.2.2. Das Gemisch aus Luft und Abgasen muss an der Stelle, an der sich die Probenahmesonden befinden, homogen sein (Absatz 3.3.3 dieses Unteranhangs). Mit den Probenahmesonden sind repräsentative Proben des verdünnten Abgases zu entnehmen.
3.2.3. Mit diesem System muss das Gesamtvolumen der verdünnten Abgase gemessen werden können.
3.2.4. Das Probenahmesystem muss gasdicht sein. Die Auslegung des Probenahmesystems für variable Verdünnung und die für seine Bauteile verwendeten Werkstoffe müssen derart sein, dass die Konzentration einer jeglichen Verbindung in den verdünnten Abgasen nicht beeinflusst wird. Wird durch ein Teil des Systems (Wärmetauscher, Zyklonabscheider, Ansaugvorrichtung usw.) die Konzentration einer beliebigen Abgasverbindung verändert und kann der Fehler nicht behoben werden, dann muss die Probe dieser Verbindung vor diesem Teil entnommen werden.
3.2.5. Alle Teile des Verdünnungssystems, die mit dem unverdünnten oder verdünnten Abgas in Kontakt kommen, müssen so ausgelegt sein, dass Ablagerungen oder Änderungen der Partikel minimiert werden. Alle Teile müssen aus elektrisch leitenden und mit den Bestandteilen der Abgase nicht reagierenden Werkstoffen gefertigt und zur Vermeidung elektrostatischer Effekte geerdet sein.
3.2.6. Hat das zu prüfende Fahrzeug eine Auspuffanlage mit mehreren Endrohren, dann sind diese Rohre möglichst nah am Fahrzeug miteinander zu verbinden, ohne dass sein Betriebsverhalten beeinträchtigt wird.
3.3. Besondere Anforderungen
3.3.1. Verbindung zum Fahrzeugauspuff
3.3.1.1. Der Anfang vom Verbindungsrohr ist die Auslassöffnung des Auspuffs. Das Ende des Verbindungsrohrs ist die Probenahmestelle oder die erste Stelle der Verdünnung.
Bei Mehrfachauspuffkonfigurationen, in denen alle Auspuffendrohre kombiniert sind, ist der Anfang des Verbindungsrohrs an der Stelle, an der alle Auspuffendrohre miteinander verbunden sind. In diesem Fall ist es zulässig, das Rohr zwischen der Auslassöffnung des Auspuffes und dem Anfang des Verbindungsrohres zu isolieren oder zu erhitzen.
3.3.1.2. Das Verbindungsrohr zwischen dem Fahrzeug und dem Verdünnungssystem muss so ausgelegt sein, dass Wärmeverluste minimiert werden.
3.3.1.3 Das Verbindungsrohr muss die folgenden Anforderungen erfüllen:
3.3.2. Konditionierung der Verdünnungsluft
3.3.2.1. Die Verdünnungsluft, die zur Vorverdünnung des Abgases im Tunnel der CVS-Anlage verwendet wird, muss durch ein Filtermedium, mit dem mindestens 99,95 % der Partikel der Größe mit dem höchsten Durchlassgrad abgeschieden werden können, oder durch einen Filter, der mindestens der Klasse H13 nach der Norm EN1822:2009 entspricht, geleitet werden. Diese Norm enthält die Vorschriften für Hochleistungs-Partikelfilter (High Efficiency Particulate Air filters, HEPA-Filter). Die Verdünnungsluft kann auch durch Aktivkohlefilter gereinigt werden, bevor sie in das HEPA-Filter geleitet wird. Es wird empfohlen, einen gegebenenfalls eingesetzten zusätzlichen groben Partikelfilter vor den HEPA-Filter und hinter die Aktivkohle zu setzen.
3.3.2.2 Auf Antrag des Fahrzeugherstellers können nach bestem fachlichen Ermessen Proben der Verdünnungsluft entnommen werden, um den Anteil der Partikelmasse aus dem Verdünnungstunnel an der Hintergrund-Partikelmasse zu bestimmen, damit dieser von den im verdünnten Abgas gemessenen Werten abgezogen werden kann. Siehe Unteranhang 6 Absatz 2.1.3
3.3.3. Verdünnungstunnel
3.3.3.1. Die Fahrzeugabgase und die Verdünnungsluft müssen gemischt werden können. Eine Mischvorrichtung kann eingesetzt werden.
3.3.3.2 An der Anbringungsstelle der Probenahmesonde darf die Homogenität des Gemisches in einem beliebigen Querschnitt um höchstens ± 2 % vom Durchschnitt der Werte abweichen, die an mindestens fünf gleichmäßig über den Durchmesser des Gasstroms verteilten Stellen gemessen wurden.
3.3.3.3. Für die Probenahmen zur Bestimmung von Partikelmasse und Partikelzahl der Emissionen ist ein Verdünnungstunnel zu verwenden, der:
3.3.4. Ansaugvorrichtung
3.3.4.1. Diese Vorrichtung kann eine Reihe fester Drehzahlen haben, damit ein ausreichender Durchsatz gewährleistet ist, um die Kondenswasserbildung zu verhindern. Dieses Ergebnis wird erreicht, wenn der Durchsatz entweder:
3.3.4.2. Die Einhaltung der Anforderungen von Absatz 3.3.4.1 dieses Unteranhangs ist nicht notwendig, wenn die CVS-Anlage so ausgelegt ist, dass die Kondensation durch folgende Methoden oder Kombinationen von Methoden verhindert wird:
In diesen Fällen ist die Auswahl des CVS-Durchsatzes für die Prüfung durch den Nachweis zu begründen, dass an keiner Stelle im CVS-Sammelbeutel oder dem analytischen System Kondensation von Wasser auftreten kann.
3.3.5. Volumenmessung im Vorverdünnungssystem
3.3.5.1. Die Methode zur Messung des Gesamtvolumens der verdünnten Abgase in der Probenahmeeinrichtung mit konstantem Volumen muss unter allen Betriebsbedingungen eine Messgenauigkeit von ± 2 gewährleisten. Kann das Gerät Temperaturschwankungen des Gemisches aus Abgasen und Verdünnungsluft am Messpunkt nicht ausgleichen, dann muss ein Wärmetauscher verwendet werden, um die Temperatur bei einer Verdrängerpumpe und CVS-Anlage innerhalb von ± 6 °C, bei einem kritisch durchströmten Venturi-Rohr und einer CVS-Anlage innerhalb von ± 11 °C, bei einem Ultraschalldurchsatzmesser und einer CVS-Anlage innerhalb von ± 6 °C und bei einem subsonischen Venturi-Rohr und einer CVS-Anlage innerhalb von ± 11 °C der vorgesehenen Betriebstemperatur zu halten.
3.3.5.2 Falls erforderlich, kann zum Schutz des Volumenmessgeräts z.B. ein Zyklonabscheider oder ein Grobpartikelfilter verwendet werden.
3.3.5.3. Ein Temperaturfühler ist unmittelbar vor dem Volumenmessgerät anzubringen. Dieser Temperaturfühler muss eine Genauigkeit von ± 1 °C aufweisen und eine Ansprechzeit von 0,1 Sekunden bei 62 % einer gegebenen Temperaturveränderung haben (gemessen in Silikonöl).
3.3.5.4 Die Messung des Druckunterschieds zum Luftdruck ist vor und gegebenenfalls hinter dem Volumenmessgerät vorzunehmen
3.3.5.5. Druckmessungen während der Prüfung müssen mit einer Präzision und einer Genauigkeit von ± 0,4 kPa durchgeführt werden. Siehe Tabelle A5/5
3.3.6. Empfohlene Systemmerkmale
Abbildung A5/3 ist eine schematische Dartsellung von Abgasverdünnungssystemen, die die Anforderungen dieses Unteranhangs erfüllen
Die folgenden Bauteile werden empfohlen:
Eine exakte Übereinstimmung mit diesen Abbildungen ist nicht erforderlich. Es können zusätzliche Teile, wie z.B. Instrumente, Ventile, Magnetventile und Schalter, verwendet werden, um zusätzliche Daten zu erhalten und die Funktionen der einzelnen Teile der Anlage zu koordinieren.
Abbildung A5/3 Abgasverdünnungssystem

3.3.6.1. Verdrängerpumpe (PDP)18
Mit einem Vollstrom-Abgasverdünnungssystem mit Verdrängerpumpe (PDP) wird entsprechend den Vorschriften dieses Unteranhangs der Gasdurchsatz durch die Pumpe bei konstanter Temperatur und konstantem Druck gemessen. Zur Messung des Gesamtvolumens wird die Zahl der Umdrehungen der kalibrierten Verdrängerpumpe gezählt. Die proportionale Probe erhält man durch Entnahme bei konstantem Durchsatz mit einer Pumpe, einem Durchsatzmesser und einem Durchflussregler.
3.3.6.1.1 - gestrichen -18
3.3.6.2 Venturi-Rohr mit kritischer Strömung (CFV)
3.3.6.2.1 Wird bei dem Vollstrom-Abgasverdünnungssystem ein CFV verwendet, dann gelten die Grundsätze der Strömungslehre in Bezug auf die kritische Strömung. Der variable Durchsatz des Gemisches aus Verdünnungsluft und Abgas erfolgt bei Schallgeschwindigkeit, die der Quadratwurzel aus der Gastemperatur direkt proportional ist. Der Durchsatz wird während der gesamten Prüfung kontinuierlich überwacht, berechnet und integriert.
3.3.6.2.2 Durch die Verwendung eines weiteren kritisch durchströmten Venturi-Rohrs für die Probenahme wird die Proportionalität der Gasproben aus dem Verdünnungstunnel gewährleistet. Da Druck und Temperatur beim Einlass in beide Venturi-Rohre gleich sind, ist das Volumen des für die Probenahme abgeleiteten Gasstroms proportional zum Gesamtvolumen des verdünnten Abgas-Luft-Gemisches; das System entspricht folglich den Vorschriften dieses Unteranhangs.
3.3.6.2.3 Ein Mess-CFV dient der Messung der Durchsatzmenge des verdünnten Abgases.
3.3.6.3. Venturi-Rohr mit subsonischer Strömung (SSV)
3.3.6.3.1. Wird bei dem Vollstrom-Abgasverdünnungssystem ein SSV (Abbildung A5/4) verwendet, dann gelten die Grundsätze der Strömungslehre. Der variable Durchsatz des Gemisches aus Verdünnungsluft und Abgast erfolgt bei Schallgeschwindigkeit, die aus den physikalischen Maßen des subsonischen Venturi-Rohrs und der Messung der absoluten Temperatur (T) und des absoluten Drucks (P) am Einlass des Venturi-Rohrs und des Drucks in der Einschnürung des Venturi-Rohrs berechnet wird. Der Durchsatz wird während der gesamten Prüfung kontinuierlich überwacht, berechnet und integriert.
3.3.6.3.2 Ein SSV dient der Messung der Durchsatzmenge des verdünnten Abgases.
Abbildung A5/4 Schematische Darstellung eines subsonischen Venturi-Rohrs (SSV)
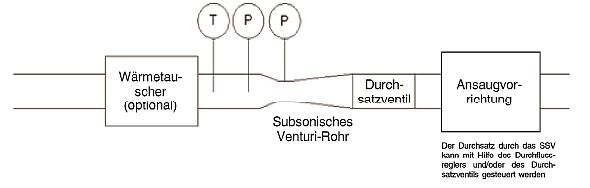
3.3.6.4. Ultraschalldurchsatzmesser (UFM)
3.3.6.4.1 Ein UFM misst die Geschwindigkeit des verdünnten Abgases in den CVS-Leitungen auf der Grundlage der Ultraschalldurchsatzerkennung mittels eines Paars oder mehrerer Paare von Ultraschallsendern/-empfängern, die wie auf Abbildung A5/5 im Inneren der Leitungen angebracht sind. Die Geschwindigkeit des strömenden Gases wird mittels des Zeitunterschieds zwischen der Übertragungsdauer des Ultraschallsignals vom Sender zum Empfänger mit dem und gegen den Strom ermittelt. Die Geschwindigkeit des Gases wird mithilfe eines Kalibrierfaktors für den Durchmesser des Rohrs mit Echtzeitkorrektur um die Temperatur des verdünnten Abgases und den absoluten Druck in einen Standard-Volumendurchsatz konvertiert.
3.3.6.4.2 Zu den Systembestandteilen gehören:
Abbildung A5/5 Schematische Darstellung eines Ultraschalldurchsatzmessers (UFM)

3.3.6.4.3 Für die Gestaltung und die Nutzung von CVS des Typs UFM gelten folgende Bedingungen:
|
weiter . | |
(Stand: 22.03.2023)
Alle vollständigen Texte in der aktuellen Fassung im Jahresabonnement
Nutzungsgebühr: 90.- € netto (Grundlizenz)
(derzeit ca. 7200 Titel s.Übersicht - keine Unterteilung in Fachbereiche)
Die Zugangskennung wird kurzfristig übermittelt
? Fragen ?
Abonnentenzugang/Volltextversion