

umwelt-online: Verordnung (EU) 2017/2400 zur Durchführung der Verordnung (EG) Nr. 595/2009 hinsichtlich der Bestimmung der CO2-Emissionen und des Kraftstoffverbrauchs von schweren Nutzfahrzeugen sowie zur Änderung der Richtlinie 2007/46/EG sowie der Verordnung (EU) Nr. 582/2011 (2)
|
zurück | |
| Stamm-Motor oder Motortyp | Motoren einer CO2-Motorenfamilie | |||||||||
| A | B | C | D | E | ||||||
| 3.2.17. | Spezifische Informationen bezüglich gasbetriebener Motoren schwerer Nutzfahrzeuge (Bei anders ausgelegten Systemen sind entsprechende Angaben vorzulegen.) | |||||||||
| 3.2.17.1 | Kraftstoff: LPG /NG-H/NG-L /NG-HL 1 | |||||||||
| 3.2.17.2. | Druckregler oder Verdampfer/Druckregler 1 | |||||||||
| 3.2.17.2.1. | Marke(n) | |||||||||
| 3.2.17.2.2. | Typ(en) | |||||||||
| 3.2.17.2.3. | Anzahl der Druckminderungsstufen | |||||||||
| 3.2.17.2.4. | Druck in der Endstufe mindestens (kPa) - höchstens (kPa) | |||||||||
| 3.2.17.2.5. | Anzahl der Haupteinstellpunkte | |||||||||
| 3.2.17.2.6. | Anzahl der Leerlaufeinstellpunkte | |||||||||
| 3.2.17.2.7. | Nummer der Typgenehmigung | |||||||||
| 3.2.17.3. | Kraftstoffzufuhr: Mischer / Gaseinblasung / Flüssigkeitseinspritzung / Direkteinspritzung 1 | |||||||||
| 3.2.17.3.1. | Gemischregelung | |||||||||
| 3.2.17.3.2. | Beschreibung des Systems und/oder Diagramm und Zeichnungen | |||||||||
| 3.2.17.3.3. | Nummer der Typgenehmigung | |||||||||
| 3.2.17.4. | Mischer | |||||||||
| 3.2.17.4.1. | Anzahl | |||||||||
| 3.2.17.4.2. | Marke(n) | |||||||||
| 3.2.17.4.3. | Typ(en) | |||||||||
| 3.2.17.4.4. | Lage | |||||||||
| 3.2.17.4.5. | Einstellmöglichkeiten | |||||||||
| 3.2.17.4.6. | Nummer der Typgenehmigung | |||||||||
| 3.2.17.5. | Motorsaugrohreinspritzung | |||||||||
| 3.2.17.5.1. | Einspritzverfahren: Zentraleinspritzung / Mehrpunkteinspritzung 1 | |||||||||
| 3.2.17.5.2. | Einspritzverfahren: kontinuierlich/simultan/sequentiell 1 | |||||||||
| 3.2.17.5.3. | Einspritzsystem | |||||||||
| 3.2.17.5.3.1. | Marke(n) | |||||||||
| 3.2.17.5.3.2. | Typ(en) | |||||||||
| 3.2.17.5.3.3. | Einstellmöglichkeiten | |||||||||
| 3.2.17.5.3.4. | Nummer der Typgenehmigung | |||||||||
| 3.2.17.5.4. | Förderpumpe (falls erforderlich) | |||||||||
| 3.2.17.5.4.1. | Marke(n) | |||||||||
| 3.2.17.5.4.2. | Typ(en) | |||||||||
| 3.2.17.5.4.3. | Nummer der Typgenehmigung | |||||||||
| 3.2.17.5.5. | Einspritzdüse(n) | |||||||||
| 3.2.17.5.5.1. | Marke(n) | |||||||||
| 3.2.17.5.5.2. | Typ(en) | |||||||||
| 3.2.17.5.5.3. | Nummer der Typgenehmigung | |||||||||
| 3.2.17.6. | Direkteinspritzung | |||||||||
| 3.2.17.6.1. | Einspritzpumpe/Druckregler 1 | |||||||||
| 3.2.17.6.1.1. | Marke(n) | |||||||||
| 3.2.17.6.1.2. | Typ(en) | |||||||||
| 3.2.17.6.1.3. | Einspritzeinstellung | |||||||||
| 3.2.17.6.1.4. | Nummer der Typgenehmigung | |||||||||
| 3.2.17.6.2. | Einspritzdüse(n) | |||||||||
| 3.2.17.6.2.1. | Marke(n) | |||||||||
| 3.2.17.6.2.2. | Typ(en) | |||||||||
| 3.2.17.6.2.3. | Öffnungsdruck oder Kennlinie 1 | |||||||||
| 3.2.17.6.2.4. | Nummer der Typgenehmigung | |||||||||
| 3.2.17.7. | Elektronisches Steuergerät (ECU) | |||||||||
| 3.2.17.7.1. | Marke(n) | |||||||||
| 3.2.17.7.2. | Typ(en) | |||||||||
| 3.2.17.7.3. | Einstellmöglichkeiten | |||||||||
| 3.2.17.7.4. | Kennnummer(n) der Softwarekalibrierung | |||||||||
| 3.2.17.8. | Erdgasspezifische Ausrüstung | |||||||||
| 3.2.17.8.1. | Variante 1 (nur wenn für einen Motor eine Genehmigung für mehrere bestimmte Kraftstoffzusammensetzungen erteilt werden soll) | |||||||||
| 3.2.17.8.1.0.1. | Selbstanpassung? ja/nein 1 | |||||||||
| 3.2.17.8.1.0.2. - gestrichen -19 | ||||||||||
| 3.2.17.8.1.1. | Methan (CH4) ...
Ethan (C2H6) ... Propan (C3H8) ... Butan (C4H10) ... C5/C5+: ... Sauerstoff (O2) ... Inertgas (N2, He usw.) ... |
Basis (Mol-%)
Basis (Mol-%) Basis (Mol-%) Basis (Mol-%) Basis (Mol-%) Basis (Mol-%) Basis (Mol-%) |
min. (Mol-%)
min. (Mol-%) min. (Mol-%) min. (Mol-%) min. (Mol-%) min. (Mol-%) min. (Mol-%) |
max. (Mol-%)
max. (Mol-%) max. (Mol-%) max. (Mol-%) max. (Mol-%) max. (Mol-%) max. (Mol-%) |
||||||
| 3.5.5. | Spezifischer Kraftstoffverbrauch und Korrekturfaktoren | |||||||||
| 3.5.5.1. | Spezifischer Kraftstoffverbrauch (SFC) während des Zyklus WHSC "SFCWHSC" gemäß Absatz 5.3.3 g/kWh | |||||||||
| 3.5.5.2. | Korrigierter spezifischer Kraftstoffverbrauch (SFC) während des Zyklus WHSC "SFCWHSC,corr" gemäß Absatz 5.3.3.1 ... g/kWh | |||||||||
| 3.5.5.3. | Korrekturfaktor für städtischen Anteil am WHTC-Fahrzyklus (Wert aus dem Motor-Vorverarbeitungsinstrument) | |||||||||
| 3.5.5.4. | Korrekturfaktor für außerstädtischen Anteil am WHTC-Fahrzyklus (Wert aus dem Motor-Vorverarbeitungsinstrument) | |||||||||
| 3.5.5.5. | Korrekturfaktor für Autobahnanteil am WHTC-Fahrzyklus (Wert aus dem Motor-Vorverarbeitungsinstrument) | |||||||||
| 3.5.5.6. | Ausgleichsfaktor für Kaltstart-/Warmstart-Emissionen (Wert aus dem Motor-Vorverarbeitungsinstrument) | |||||||||
| 3.5.5.7. | Korrekturfaktor CFRegPerfür Motoren mit Abgasnachbehandlungssystem mit periodischer Regenierung (Wert aus dem Motor-Vorverarbeitungsinstrument) | |||||||||
| 3.5.5.8. | Korrekturfaktor für Standard-Nettoheizwert (Wert aus dem Motor-Vorverarbeitungsinstrument) | |||||||||
| 3.6. | Zulässige Temperaturen nach Angabe des Herstellers | |||||||||
| 3.6.1. | Kühlsystem | |||||||||
| 3.6.1.1. | Flüssigkeitskühlung: Höchste Temperatur am Motoraustritt (K) | |||||||||
| 3.6.1.2. | Luftkühlung | |||||||||
| 3.6.1.2.1. | Bezugspunkt | |||||||||
| 3.6.1.2.2. | Höchste Temperatur am Bezugspunkt (K) | |||||||||
| 3.6.2. | Höchsttemperatur am Austritt aus dem Ladeluftkühler (K) | |||||||||
| 3.6.3. | Höchste Abgastemperatur an dem Punkt in der Abgasleitung, der dem Austrittsflansch des Abgaskrümmers oder Turboladers (K) benachbart ist. | |||||||||
| 3.6.4. | Kraftstofftemperatur: Mindesttemperatur (K) - Höchsttemperatur (K)
bei Dieselmotoren am Einlass der Einspritzpumpe, bei Gasmotoren an der Druckregler-Endstufe |
|||||||||
| 3.6.5. | Schmiermitteltemperatur
Mindesttemperatur (K) - Höchsttemperatur (K) |
|||||||||
| 3.8. | Schmiersystem | |||||||||
| 3.8.1. | Beschreibung des Systems | |||||||||
| 3.8.1.1. | Lage des Schmiermittelbehälters | |||||||||
| 3.8.1.2. | Zuführungssystem (durch Pumpe/Einspritzung in den Einlass/Mischung mit Kraftstoff usw.) 1 | |||||||||
| 3.8.2. | Schmiermittelpumpe | |||||||||
| 3.8.2.1. | Marke(n) | |||||||||
| 3.8.2.2. | Typ(en) | |||||||||
| 3.8.3. | Mischung mit Kraftstoff | |||||||||
| 3.8.3.1. | Prozentsatz | |||||||||
| 3.8.4. | Ölkühler: ja/nein 1 | |||||||||
| 3.8.4.1. | Zeichnung(en) | |||||||||
| 3.8.4.1.1. | Marke(n) | |||||||||
| 3.8.4.1.2. | Typ(en) | |||||||||
| Anmerkungen:
1) Nichtzutreffendes streichen (trifft mehr als eine Angabe zu, ist unter Umständen nichts zu streichen). 3) Diese Zahl ist auf das nächste Zehntel eines Millimeters zu runden. 4) Dieser Wert ist auf den nächsten vollen cm3 zu runden. 5) Einschließlich Toleranzangabe. 6) Gemäß den Anforderungen von Regelung Nr. 85. 7) Den Größt- und Kleinstwert für jede Variante eintragen. 8) Zu dokumentieren im Fall einer einzigen OBD-Motorenfamilie und wenn noch nicht in den Unterlagen gemäß dieser Anlage Teil 1 Absatz 3.2.12.2.7.0.4 dokumentiert. |
||||||||||
Anlage zum Beschreibungsbogen19
Prüfbedingungen
1. Zündkerzen
1.1. Fabrikmarke
1.2. Typ
1.3. Elektrodenabstand
2. Zündspule
2.1. Fabrikmarke
2.2. Typ
3. Schmiermittel
3.1. Fabrikmarke
3.2. Typ (Wenn das Schmiermittel dem Kraftstoff zugesetzt ist, ist der prozentuale Anteil des Öls in der Mischung anzugeben).
3.3. Spezifikationen des Schmiermittels
4. Verwendeter Prüfkraftstoff19
4.1. Kraftstofftyp (gemäß Anhang V Absatz 6.1.9 der Verordnung (EU) 2017/2400 der Kommission [OP, please insert the publication number of this Regulation.]
4.2. Eindeutige Identifizierungsnummer (Nummer der Herstellungscharge) des verwendeten Kraftstoffs
4.3. Nettoheizwert (gemäß Anhang V Absatz 6.1.8 der Verordnung (EU) 2017/2400 der Kommission
4.4. Typ des Bezugskraftstoffs (Typ des Bezugskraftstoffs, der für die Prüfung gemäß Anhang V Nummer 3.2 der Verordnung (EU) 2017/2400 der Kommission verwendet wird)
5. Vom Motor angetriebene Nebenaggregate
5.1. Die durch die Hilfseinrichtungen/Nebenaggregate aufgenommene Leistung ist nur zu ermitteln, wenn
Hinweise: Bei der Emissionsprüfung und der Leistungsprüfung gelten unterschiedliche Anforderungen für vom Motor angetriebene Nebenaggregate.
5.2. Aufzählung und Einzelheiten
5.3. Leistungsaufnahme bei für die Emissionsprüfung spezifischen Motordrehzahlen
Tabelle 1 Leistungsaufnahme bei für die Emissionsprüfung spezifischen Motordrehzahlen
| Ausrüstung | |||||
| Leerlauf | Niedrige Drehzahl | Hohe Drehzahl | Vorzugsdrehzahl 2 | n95h | |
| Pa Hilfseinrichtungen / Nebenaggregate gemäß Anhang 4 Anlage 6 der UNECE-Regelung Nr. 49 Rev. 06 erforderlich |
|||||
| Pb Hilfseinrichtungen / Nebenaggregate gemäß Anhang 4 Anlage 6 der UNECE-Regelung Nr. 49 Rev. 06 nicht erforderlich |
|||||
5.4. Ventilatorkonstante gemäß Anlage 5 dieses Anhangs (falls zutreffend)
5.4.1. Cavgfan(falls zutreffend)
5.4.2. Cindfan(falls zutreffend)
Tabelle 2 Wert der Ventilatorkonstante Cindfanfür unterschiedliche Motordrehzahlen
| Wert | Motor- drehzahl | Motor- drehzahl | Motor- drehzahl | Motor- drehzahl | Motor- drehzahl | Motor- drehzahl | Motor- drehzahl | Motor- drehzahl | Motor- drehzahl | Motor- drehzahl |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | |
| Motordrehzahl (U/min) | ||||||||||
| Ventilatorkonstante Cindfan,i |
6. Motorleistung (Herstellerangaben)
6.1. Motorprüfdrehzahlen für Emissionsprüfungen gemäß Anhang 4 der UNECE-Regelung Nr. 49 Rev. 06 1
| Niedrige Drehzahl (nlo): ... | U/min |
| Hohe Drehzahl (nhi): ... | U/min |
| Leerlaufdrehzahl ... | U/min |
| Vorzugsdrehzahl ... | U/min |
| n95h... | U/min |
6.2. Erklärte Werte für die Leistungsprüfung gemäß Regelung Nr. 85
| 6.2.1. Leerlaufdrehzahl ... | U/min |
| 6.2.2. Drehzahl bei Höchstleistung ... | U/min |
| 6.2.3. Höchstleistung | kW |
| 6.2.4. Drehzahl bei maximalem Drehmoment | U/min |
| 6.2.5. Maximales Drehmoment | Nm |
| CO2-Motorenfamilie | Anlage 3 |
1. Parameter zur Bestimmung der CO2-Motorenfamilie19
Die vom Hersteller festgelegte CO2-Motorenfamilie muss die Zugehörigkeitskriterien laut Anhang 4 Absatz 5.2.3 der UNECE-Regelung Nr. 49 Rev. 06 erfüllen. Eine CO2-Motorenfamilie kann auch nur einen einzigen Motor umfassen.
Zusätzlich zu diesen Zugehörigkeitskriterien muss die vom Hersteller festgelegte CO2-Motorenfamilie auch die in den Absätzen 1.1 bis 1.9 dieser Anlage aufgeführten Zugehörigkeitskriterien erfüllen.
Zusätzlich zu den nachstehenden Parametern kann der Hersteller weitere Kriterien einführen, mit denen die Festlegung enger gefasster Familien möglich ist. Diese Parameter müssen nicht zwangsläufig mit der Höhe des Kraftstoffverbrauchs in Verbindung stehen.
1.1. Verbrennungsbezogene geometrische Daten
1.1.1. Hubraum pro Zylinder
1.1.2. Zylinderanzahl
1.1.3. Daten zu Bohrung und Hub
1.1.4. Brennraumgeometrie und Verdichtungsverhältnis
1.1.5. Ventildurchmesser und Öffnungsgeometrie
1.1.6. Einspritzdüsen (Konstruktion und Lage)
1.1.7. Konstruktion des Zylinderkopfs
1.1.8. Konstruktion von Kolben und Kolbenringen
1.2. Für die Luftaufbereitung relevante Bauteile
1.2.1. Art der Einrichtung zur Aufladung (Wastegate-Turbolader, Variable-Turbinengeometrie-Lader, zweistufig, sonstige) und thermodynamische Kenndaten
1.2.2. Konzept der Ladeluftkühlung
1.2.3. Konzept der Ventilsteuerzeiten (fest, teilweise flexibel, flexibel)
1.2.4. AGR-Konzept (ungekühlt/gekühlt, hoher/niedriger Druck, AGR-Steuerung)
1.3. Einspritzsystem
1.4. Antriebskonzept für Hilfseinrichtungen/Vorrichtungen (mechanisch, elektrisch, sonstige)
1.5. Abwärmenutzung (ja/nein; Konzept und System)
1.6. Nachbehandlungssystem
1.6.1. Kenndaten des Reagens-Dosiersystems (Reagens- und Dosierkonzept)
1.6.2. Katalysator und DPF (Anordnung, Material und Beschichtung)
1.6.3. Kenndaten des HC-Dosiersystems (Gestaltungs- und Dosierkonzept)
1.7. Volllastkurve
1.7.1. Die Drehmomentwerte bei jeder Motordrehzahl der entsprechend Absatz 4.3.1 ermittelten Volllastkurve des CO2-Stammmotors müssen mindestens genauso hoch sein wie bei allen anderen Motoren dieser CO2-Familie bei derselben Motordrehzahl über den gesamten aufgezeichneten Motordrehzahlbereich.
1.7.2. Die Drehmomentwerte bei jeder Motordrehzahl der entsprechend Absatz 4.3.1 ermittelten Volllastkurve desjenigen Motors, der innerhalb der CO2-Motorenfamilie die niedrigste Nennleistung aufweist, dürfen maximal genauso hoch sein wie bei allen anderen Motoren dieser CO2-Familie bei derselben Motordrehzahl über den gesamten aufgezeichneten Motordrehzahlbereich.
1.7.3. Drehmomentwerte innerhalb eines Toleranzbereichs, der sich auf die in den Nummern 1.7.1 und 1.7.2. beschriebenen Referenzwerte bezieht, gelten als gleichwertig. Der Toleranzbereich ist definiert als + 20 Nm oder + 2 Prozent des Drehmoments des CO2-Stammmotors bei der jeweiligen Motordrehzahl, je nachdem, welcher Wert größer ist.
1.8. Charakteristische Motorprüfdrehzahlen
1.8.1. Die Leerlaufdrehzahl nidle des CO2-Stammmotors, die vom Hersteller in seinem Antrag auf Zertifizierung im Beschreibungsbogen gemäß Nummer 3.2.1.6 aus Anlage 2 dieses Anhangs angegeben wurde, darf maximal genauso hoch sein wie bei allen anderen Motoren dieser CO2-Familie.
1.8.2. Die Motordrehzahl n95h aller Motoren derselben CO2-Familie (außer dem CO2-Stammmotor), die anhand der entsprechend Absatz 4.3.1 aufgezeichneten Volllastkurve des Motors ermittelt wird, und zwar durch Anwendung der Definitionen zu den charakteristischen Motordrehzahlen gemäß Anhang 4 Absatz 7.4.6 der UNECE-Regelung Nr. 49 Rev. 6, darf von der Motordrehzahl n95h des CO2-Stammmotors nicht mehr als ± 3 Prozent abweichen.
1.8.3. Die Motordrehzahl n57 aller Motoren derselben CO2-Familie (außer dem CO2-Stammmotor), die anhand der entsprechend Absatz 4.3.1 aufgezeichneten Volllastkurve des Motors ermittelt wird, und zwar durch Anwendung der Definitionen gemäß Absatz 4.3.5.2.1, darf von der Motordrehzahl n57 des CO2-Stammmotors nicht mehr als ± 3 Prozent abweichen.
1.9. Mindestanzahl von Punkten in der Abbildung des Kraftstoffverbrauchs
1.9.1. Bei allen Motoren derselben CO2-Familie müssen in der Abbildung des Kraftstoffverbrauchs mindestens 54 Punkte unterhalb ihrer jeweiligen, entsprechend Absatz 4.3.1 ermittelten Volllastkurve des Motors liegen.
2. Wahl des CO2-Stammmotors
Der CO2-Stammmotor der CO2-Motorenfamilie ist nach den folgenden Kriterien auszuwählen:
2.1. Höchste Nennleistung aller Motoren innerhalb der CO2-Motorenfamilie.
| Übereinstimmung der CO2-Emissionen und der für den Kraftstoffverbrauch maßgeblichen Eigenschaften | Anlage 4 |
1. Allgemeine Bestimmungen
1.1. Anhand der Darstellung in den Zertifizierungen gemäß Anlage 1 dieses Anhangs sowie der Darstellung im Beschreibungsbogen gemäß Anlage 2 dieses Anhangs muss überprüft werden, ob die CO2-Emissionen und die für den Kraftstoffverbrauch maßgeblichen Eigenschaften mit den geltenden Vorgaben übereinstimmen.
1.2. Wurde eine Motorzertifizierung bereits verlängert, müssen die Prüfungen an den Motoren durchgeführt werden, die im Informationspaket der entsprechenden Verlängerung beschrieben sind.
1.3. Alle zu prüfenden Motoren müssen aus der Serienproduktion stammen, die die Auswahlkriterien gemäß Absatz 3 dieser Anlage erfüllen.
1.4. Die Prüfungen dürfen mit den entsprechenden handelsüblichen Kraftstoffen durchgeführt werden. Auf Antrag des Herstellers dürfen die in Absatz 3.2 angegebenen Bezugskraftstoffe verwendet werden.
1.5. Werden Prüfungen, mit denen die Übereinstimmung der CO2-Emissionen und der für den Kraftstoffverbrauch maßgeblichen Eigenschaften von Gasmotoren (Erdgas, LPG) mit den geltenden Vorgaben überprüft werden soll, mit handelsüblichen Kraftstoffen durchgeführt, muss der Motorhersteller gegenüber der Genehmigungsbehörde die geeignete Ermittlung der Zusammensetzung des Gaskraftstoffs nachweisen, anhand derer der Nettoheizwert gemäß Absatz 4 dieser Anlage nach bestem technischen Ermessen bestimmt werden kann.
2. Anzahl der zu prüfenden Motoren und CO2-Motorenfamilien
2.1. 0,05 Prozent aller Motoren, die im vergangenen Produktionsjahr hergestellt wurden und unter diese Regelung fallen, bilden die Grundlage für die Ableitung der Anzahl der CO2-Motorenfamilien und die Anzahl der Motoren innerhalb dieser CO2-Familien, die jährlich geprüft werden müssen, um die Übereinstimmung der zertifizierten CO2-Emissionen und der für den Kraftstoffverbrauch maßgeblichen Eigenschaften zu überprüfen. Der erhaltene Wert für diese 0,05 Prozent der betreffenden Motoren muss auf die nächste ganze Zahl gerundet werden. Dieses Ergebnis sei nCOP,base.
2.2. Unbeschadet der Bestimmungen gemäß Absatz 2.1 muss für nCOP,base mindestens 30 verwendet werden.
2.3. Das gemäß den Absätzen 2.1 und 2.2 dieser Anlage ermittelte Ergebnis für nCOP,base muss durch 10 geteilt und anschließend auf die nächste ganze Zahl gerundet werden. Dies ist die Anzahl der CO2-Motorenfamilien (nCOP,fam), die jährlich geprüft werden müssen, um die Übereinstimmung der zertifizierten CO2-Emissionen und der für den Kraftstoffverbrauch maßgeblichen Eigenschaften zu überprüfen.
2.4. Für den Fall, dass ein Hersteller weniger CO2-Familien hat als die gemäß Absatz 2.3 ermittelte Zahl nCOP,fam, gilt als Anzahl der zu prüfenden CO2-Familien (nCOP,fam) die Gesamtzahl der CO2-Familien des Herstellers.
3. Auswahl der zu prüfenden CO2-Motorenfamilien
Von der Anzahl der zu prüfenden CO2-Motorenfamilien gemäß Festlegung in Absatz 2 dieser Anlage müssen die ersten beiden CO2-Familien diejenigen mit der höchsten Produktionszahl sein.
Die verbleibende Anzahl der zu prüfenden CO2-Motorenfamilien muss unter allen vorhandenen CO2-Motorenfamilien zufällig ausgewählt und gemeinsam von Hersteller und Genehmigungsbehörde vereinbart werden.
4. Durchzuführender Prüflauf19
Zur Ermittlung der Anzahl der Motoren jeder CO2-Motorenfamilie, die mindestens zu prüfen sind (nCOP,min), muss nCOP,base durch nCOP,fam geteilt werden, wobei diese beiden Werte gemäß Nummer 2 zu ermitteln sind. Das Ergebnis für nCOP,min wird auf die nächste ganze Zahl gerundet. Wenn der resultierende Wert für nCOP,min kleiner als 4 ist, wird er auf 4 gesetzt, wenn er größer als 19 ist, wird er auf 19 gesetzt.
Zu jeder der gemäß Absatz 3 dieser Anlage ermittelten CO2-Motorenfamilien müssen mindestens nCOP,min Motoren dieser Familie geprüft werden, damit für die Prüfung entsprechend Absatz 9 dieser Anlage eine positive Entscheidung getroffen werden kann.
Die Aufteilung der Anzahl der erforderlichen Prüfläufe innerhalb einer CO2-Motorenfamilie auf die verschiedenen Motoren dieser CO2-Familie muss zufällig erfolgen und gemeinsam von Hersteller und Genehmigungsbehörde vereinbart werden.
Die Übereinstimmung der zertifizierten CO2-Emissionen und der für den Kraftstoffverbrauch maßgeblichen Eigenschaften muss überprüft werden, indem die Motoren der WHSC-Prüfung gemäß Absatz 4.3.4 unterzogen werden.
Es gelten sämtliche in diesem Anhang festgelegten Randbedingungen für die Zertifizierungsprüfung, jedoch mit folgenden Ausnahmen:
5. Einfahren neu hergestellter Motoren
5.1. Die Prüfungen müssen an neu hergestellten Motoren durchgeführt werden, die aus der Serienproduktion stammen und vor Beginn des Prüflaufs, anhand dessen die Übereinstimmung der zertifizierten CO2-Emissionen und der für den Kraftstoffverbrauch maßgeblichen Eigenschaften gemäß Absatz 4 dieser Anlage geprüft werden soll, höchstens 15 Stunden eingefahren werden.
5.2. Auf Antrag des Herstellers dürfen die Prüfungen auch an Motoren durchgeführt werden, die bis zu 125 Stunden eingefahren wurden. In diesem Fall muss das Einfahrverfahren vom Hersteller durchgeführt werden, der an diesen Motoren keine Einstellungen vornehmen darf.
5.3. Wenn der Hersteller ein Einfahrverfahren gemäß Absatz 5.2 dieser Anlage beantragt, kann dies an folgenden Motoren durchgeführt werden:
5.4. Sollten die Bestimmungen aus Absatz 5.3 Buchstabe b dieser Anlage Anwendung finden, darf an den nachfolgenden Motoren, die für die Prüfung der Übereinstimmung der CO2-Emissionen und der für den Kraftstoffverbrauch maßgeblichen Eigenschaften ausgewählt wurden, nicht das Einfahrverfahren angewandt werden. Stattdessen muss bei ihnen der spezifische Kraftstoffverbrauch über die WHSC-Prüfung, der an dem neu hergestellten Motor nach einer Einfahrzeit von höchstens 15 Stunden gemäß Absatz 5.1 dieser Anlage ermittelt wird, mit dem Evolutionskoeffizienten multipliziert werden.
5.5. Für den in Absatz 5.4 dieser Anlage beschriebenen Fall gelten folgende Werte für den spezifischen Kraftstoffverbrauch über die WHSC-Prüfung:
5.6. Statt eines Einfahrverfahrens gemäß den Absätzen 5.2 bis 5.5 dieser Anlage kann auf Antrag des Herstellers ein generischer Evolutionskoeffizient von 0,99 verwendet werden. In diesem Fall muss der spezifische Kraftstoffverbrauch über die WHSC-Prüfung, der an dem neu hergestellten Motor nach einer Einfahrzeit von höchstens 15 Stunden gemäß Absatz 5.1 dieser Anlage ermittelt wird, mit dem generischen Evolutionskoeffizienten von 0,99 multipliziert werden.
5.7. Wird der Evolutionskoeffizient laut Absatz 5.3 Buchstabe b dieser Anlage mit Hilfe des Stammmotors einer Motorenfamilie gemäß Anhang 4 Absätze 5.2.3 und 5.2.4 der UNECE-Regelung Nr. 49 Rev. 6 ermittelt, kann er auf alle Mitglieder einer CO2-Familie übertragen werden, die gemäß Anhang 4 Absatz 5.2.3 der UNECE-Regelung Nr. 49 Rev. 6 zu derselben Motorenfamilie gehören.
6. Zielwert für die Beurteilung der Übereinstimmung der zertifizierten CO2-Emissionen und der für den Kraftstoffverbrauch maßgeblichen Eigenschaften
Als Zielwert für die Beurteilung der Übereinstimmung der zertifizierten CO2-Emissionen und der für den Kraftstoffverbrauch maßgeblichen Eigenschaften gilt der korrigierte spezifische Kraftstoffverbrauch über die WHSC-Prüfung (SFCWHSC,corr) in g/kWh, ermittelt gemäß Absatz 5.3.3 und dokumentiert im Beschreibungsbogen als Teil der Zertifizierungen gemäß Anlage 2 dieses Anhangs für den jeweiligen geprüften Motor.
7. Tatsächlicher Wert für die Beurteilung der Übereinstimmung der zertifizierten CO2-Emissionen und der für den Kraftstoffverbrauch maßgeblichen Eigenschaften
7.1. Der spezifische Kraftstoffverbrauch über den WHSC-Prüfzyklus (SFCWHSC) muss gemäß Absatz 5.3.3 dieses Anhangs anhand der entsprechend Absatz 4 dieser Anlage durchgeführten Prüfläufe ermittelt werden. Auf Antrag des Herstellers wird der ermittelte Wert für den spezifischen Kraftstoffverbrauch durch Anwendung der Bestimmungen gemäß den Absätzen 5.3 bis 5.6 dieser Anlage geändert.
7.2. Wurde bei der Prüfung ein handelsüblicher Kraftstoff gemäß Absatz 1.4 dieser Anlage verwendet, muss der in Absatz 7.1 dieser Anlage ermittelte spezifische Kraftstoffverbrauch über die WHSC-Prüfung (SFCWHSC) auf den korrigierten Wert SFCWHSC,corr gemäß Absatz 5.3.3.1 dieses Anhangs geändert werden.
7.3. Wurde bei der Prüfung gemäß Absatz 1.4 dieser Anlage ein Bezugskraftstoff verwendet, müssen auf den in Absatz 7.1 dieser Anlage ermittelten Wert die Sonderbestimmungen gemäß Absatz 5.3.3.2 dieses Anhangs Anwendung finden.
7.4. Die gemessenen Emissionen gasförmiger Schadstoffe über die gemäß Absatz 4 durchgeführte WHSC-Prüfung müssen um den geltenden Verschlechterungsfaktor korrigiert werden, der für den jeweiligen Motor im Beiblatt des EG-Typgenehmigungsbogens angegeben ist, der gemäß der Verordnung der Kommission (EU) Nr. 582/2011 ausgestellt wurde.
8. Grenzwert für die Übereinstimmung einer einzelnen Prüfung19
Bei Dieselmotoren gilt als Grenzwert für die Beurteilung der Übereinstimmung eines einzelnen geprüften Motors der gemäß Nummer 6 ermittelte Zielwert, erhöht um 4 Prozent.
Bei Gasmotoren gilt als Grenzwert für die Beurteilung der Übereinstimmung eines einzelnen geprüften Motors der gemäß Nummer 6 ermittelte Zielwert, erhöht um 5 Prozent.
9. Beurteilung der Übereinstimmung der zertifizierten CO2-Emissionen und der für den Kraftstoffverbrauch maßgeblichen Eigenschaften
9.1. Die gemäß Absatz 7.4 dieser Anlage ermittelten Ergebnisse der Emissionsprüfungen über den WHSC-Prüfzyklus für alle gasförmigen Schadstoffe (außer Ammoniak) müssen innerhalb der geltenden Grenzwerte gemäß Festlegung in Anhang I der Verordnung (EG) Nr. 595/2009 liegen. Andernfalls gilt die Prüfung im Sinne der Beurteilung, ob die zertifizierten CO2-Emissionen und die für den Kraftstoffverbrauch maßgeblichen Eigenschaften mit den geltenden Vorgaben übereinstimmen, als ungültig.
9.2. Das Ergebnis einer einzelnen Prüfung eines gemäß Absatz 4 dieser Anlage geprüften Motors gilt als negativ, wenn der tatsächliche Wert gemäß Absatz 7 dieser Anlage größer ist als der Grenzwert gemäß Festlegung laut Absatz 8 dieser Anlage.
9.3. Für die aktuelle Stichprobengröße der geprüften Motoren innerhalb einer CO2-Familie gemäß Absatz 4 dieser Anlage muss der statistische Prüfwert ermittelt werden, der die kumulierte Anzahl an negativen Prüfungen gemäß Absatz 9.2 dieser Anlage bei der nten Prüfung quantifiziert.
9.4. Wird weder eine positive noch eine negative Entscheidung getroffen, kann der Hersteller die Prüfung jederzeit abbrechen. In diesem Fall wird eine negative Entscheidung festgehalten.
| Ermittlung der Leistungsaufnahme der Motorbauteile | Anlage 5 |
1. Ventilator19
Das Motordrehmoment muss bei im Schiebebetrieb befindlichen Motor zum einen bei aktiviertem und zum anderen bei deaktiviertem Ventilator nach der folgenden Vorgehensweise gemessen werden:
Die tatsächliche Ventilatorkonstante muss anhand der Messdaten gemäß nachstehender Gleichung errechnet werden:

dabei gilt:
| Ci | Ventilatorkonstante bei einer bestimmten Motordrehzahl |
| MDfan_disengage | gemessenes Motordrehmoment im Schiebebetrieb bei deaktiviertem Ventilator (Nm) |
| MDfan_engage | gemessenes Motordrehmoment im Schiebebetrieb bei aktiviertem Ventilator (Nm) |
| nfan_engage | Ventilatordrehzahl bei aktiviertem Ventilator (U/min) |
| nfan_disengage | Ventilatordrehzahl bei deaktiviertem Ventilator (U/min) |
| rfan | Verhältnis zwischen der Drehzahl der Ventilatorkupplung auf der Motorseite und der Drehzahl der Kurbelwelle |
Beträgt die Standardabweichung aller berechneten Werte Ci bei den drei Drehzahlen npref, n95hund nhiweniger als 3 %, muss für die Ventilatorkonstante der Mittelwert Cavg-fanverwendet werden, ermittelt aus den drei Drehzahlen npref, n95h und nhi.
Beträgt die Standardabweichung aller berechneten Werte Ci bei den drei Drehzahlen npref, n95hund nhi mindestens 3 %, müssen für die Ventilatorkonstante Cind-fan,idie verschiedenen Werte für die einzelnen Motordrehzahlen gemäß Nummer ix verwendet werden. Der Wert der Ventilatorkonstante für die tatsächliche Motordrehzahl Cfan muss durch lineare Interpolation zwischen den einzelnen Werten Cind-fan,ider Ventilatorkonstante ermittelt werden.
Das zum Antreiben des Ventilators erforderliche Motordrehmoment muss anhand nachstehender Gleichung errechnet werden:
Mfan = Cfan · nfan 2 · 10-6
dabei gilt:
| Mfan | zum Antreiben des Ventilators erforderliches Motordrehmoment (Nm) |
| Cfan | Ventilatorkonstante Cavgfanoder Cindfan,i, die nengineentspricht |
Die vom Ventilator aufgenommene mechanische Leistung muss anhand des zum Antreiben des Ventilators erforderlichen Motordrehmoments und der tatsächlichen Motordrehzahl errechnet werden. Die mechanische Leistung und das Motordrehmoment müssen gemäß Absatz 3.1.2 berücksichtigt werden.
2. Elektrische Bauteile/Anlagen
Es muss die elektrische Energie gemessen werden, die den elektrischen Motorbauteilen von außen zugeführt wird. Dieser gemessene Wert muss anschließend in mechanische Leistung umgewandelt werden, indem er durch den generischen Wirkungsgrad 0,65 geteilt wird. Die mechanische Leistung und das entsprechende Motordrehmoment müssen gemäß Absatz 3.1.2 berücksichtigt werden.
| Anlage 6 |
1. Kennzeichnungen19
Wird ein Motor entsprechend diesem Anhang zertifiziert, muss er mit Folgendem gekennzeichnet werden:
1.1. Herstellername oder Handelsmarke
1.2. Fabrikmarke und typenbezeichnung gemäß Angaben in Anlage 2 Ziffern 0.1 und 0.2 dieses Anhangs
1.3. Das Zertifizierungszeichen in Form eines Rechtecks, das den Kleinbuchstaben "e" umgibt, gefolgt von der Kennzahl des Mitgliedstaats, der die Zertifizierung ausgestellt hat:
1 für Deutschland2 für Frankreich
3 für Italien
4 für die Niederlande
5 für Schweden
6 für Belgien
7 für Ungarn
8 für die Tschechische Republik
9 für Spanien
11 für das Vereinigte Königreich
12 für Österreich
13 für Luxemburg
17 für Finnland
18 für Dänemark
19 für Rumänien
20 für Polen
21 für Portugal
23 für Griechenland
24 für Irland
25 für Kroatien
26 für Slowenien
27 für die Slowakei
29 für Estland
32 für Lettland
34 für Bulgarien
36 für Litauen
49 für Zypern
50 für Malta
1.4. Auf dem Zertifizierungszeichen muss außerdem in der Nähe des Rechtecks die "Grundgenehmigungsnummer" gemäß Vorgaben für Abschnitt 4 der Typgenehmigungsnummer entsprechend Anhang VII der Richtlinie 2007/46/EG vermerkt sein. Dieser Nummer müssen die beiden Ziffern für die laufende Nummer vorausgehen, die der aktuellsten technischen Änderung dieser Verordnung zugewiesen wurde, sowie das Zeichen "E", mit dem angegeben wird, dass die Genehmigung für einen Motor erteilt wurde.
Für diese Verordnung ist die laufende Nummer "00".
1.4.1. Beispielhaftes Zertifizierungszeichen samt Abmessungen (separate Kennzeichnung)

Das obige, an einem Motor angebrachte Zertifizierungszeichen gibt an, dass der betreffende Typ gemäß dieser Verordnung in Polen zertifiziert wurde (e20). Die ersten beiden Ziffern (00) geben die laufende Nummer an, die der aktuellsten technischen Änderung dieser Verordnung zugewiesen wurde. Der nächste Buchstabe gibt an, dass die Zertifizierung für einen Motor ausgestellt wurde (E). Die letzten vier Ziffern (0004) wurden von der Genehmigungsbehörde vergeben und stellen die Grundgenehmigungsnummer für den Motor dar.
1.5. Für den Fall, dass die Zertifizierung gemäß dieser Verordnung zur gleichen Zeit ausgestellt wird wie die Typgenehmigung für Motoren als selbständige technische Einheiten gemäß Verordnung (EU) Nr. 582/2011, können auch die in Nummer 1.4 aufgeführten Kennzeichnungsanforderungen im Anschluss an die in Anhang I Anlage 8 der Verordnung (EU) Nr. 582/2011 aufgeführten Kennzeichnungsanforderungen angegeben werden. In diesem Fall sind beide Kennzeichnungen durch ein ' / ' voneinander zu trennen.
1.5.1. Beispielhaftes Zertifizierungszeichen (kombinierte Kennzeichnung)

Das obige, an einem Motor angebrachte Zertifizierungszeichen gibt an, dass der betreffende Typ gemäß Verordnung (EU) Nr. 582/2011 in Polen zertifiziert wurde (e20) . Das 'D' steht für Diesel. Das anschließende 'C' gibt die Emissionsstufe an. Die folgenden vier Ziffern (0004) wurden von der Genehmigungsbehörde vergeben und stellen die Grundgenehmigungsnummer für den Motor gemäß Verordnung (EU) Nr. 582/2011 dar. Nach dem Schrägstrich stellen die ersten beiden Ziffern die laufende Nummer dar, die der aktuellsten technischen Änderung dieser Verordnung zugewiesen wurde, gefolgt von dem Buchstaben 'E', das für 'engine' (engl. für Motor) steht, und weiteren vier Ziffern, die von der Genehmigungsbehörde zum Zwecke der Zertifizierung gemäß dieser Verordnung ("Grundgenehmigungsnummer" nach dieser Verordnung) vergeben wurden.
1.6. Auf Ersuchen des Antragstellers für die Zertifizierung und nach vorheriger Abstimmung mit der Genehmigungsbehörde können andere typengrößen verwendet werden als die in den Ziffern 1.4.1 und 1.5.1 angegebenen. Diese anderen typengrößen müssen in gut lesbarem Zustand erhalten bleiben.
1.7. Die Kennzeichnungen, Etiketten, Schilder oder Aufkleber müssen für die Lebensdauer des Motors ausgelegt, deutlich lesbar und von dauerhafter Natur sein. Der Hersteller muss dafür sorgen, dass die Kennzeichnungen, Etiketten, Schilder oder Aufkleber nicht entfernt werden können, ohne dass sie dabei zerstört oder unkenntlich gemacht werden.
2. Nummerierung19
2.1. Zertifizierungsnummern für Motoren müssen Folgendes enthalten:
eX*YYYY/YYYY*ZZZZ/ZZZZ*E*0000*00
| Abschnitt 1 | Abschnitt 2 | Abschnitt 3 | Zusätzlicher Buchstabe zu Abschnitt 3 | Abschnitt 4 | Abschnitt 5 |
| Angabe des die Zertifizierung ausstellenden Landes | Verordnung über CO2-Zertifizierungen für schwere Nutzfahrzeuge (2017/2400) | Letzte Änderung der Verordnung (ZZZZ/ZZZZ) | E - engine (= Motor) | Grundzertifizierungsnummer 0000 | Erweiterung 00"; |
| Eingabeparameter für das Simulationsinstrument | Anlage 7 |
Diese Anlage enthält die Liste der vom Bauteilehersteller für das Simulationsinstrument bereitzustellenden Parameter. Das geltende XML-Schema sowie Beispieldaten können von der dafür bestimmten elektronischen Verteilungsplattform abgerufen werden.
Die XML-Datei wird vom Motorvorbehandlungsinstrument automatisch erzeugt.
(1) "Parameter ID": im Simulationsinstrument verwendete eindeutige Kennzeichnung für einen bestimmten Eingabeparameter oder einen Satz Eingabedaten
(2) "Type": Datentyp des Parameters
| string ... | Zeichenabfolge in ISO8859-1-Kodierung |
| token ... | Zeichenabfolge in ISO8859-1-Kodierung ohne Leerschritt am Anfang/am Ende |
| date ... | Datum und Uhrzeit in koordinierter Weltzeit (UTC) im Format: YYYY-MM-DDTHH:MM:SSZ,wobei kursive Zeichen unveränderlich sind, z.B."2002-05-30T09:30:10Z" |
| integer ... | Wert mit integralem Datentyp ohne führende Nullen, z.B."1800" |
| double, X ... | Bruchzahl mit genau X Ziffern nach dem Dezimalzeichen (".") und ohne führende Nullen, z.B. für "double, 2": "2345.67", für "double, 4": "45.6780" |
(3) "Unit" ...: physikalische Einheit des Parameters
Satz Eingabeparameter
Tabelle 1 Eingabeparameter 'Engine/General'19
| Parameter name | Parameter ID | Type | Unit | Beschreibung/Referenz |
| Manufacturer | P200 | token | [-] | |
| Model | P201 | token | [-] | |
| CertificationNumber | P202 | token | [] | |
| Date | P203 | date Time | [-] | Datum und Uhrzeit der Erstellung des Bauteil-Hashs |
| AppVersion | P204 | token | [-] | Versionsnummer des Motorvorbehandlungsinstruments |
| Displacement | P061 | int | [cm3] | |
| Idling Speed | P063 | int | [1/min] | |
| Rated Speed | P249 | int | [1/min] | |
| Rated Power | P250 | int | [W] | |
| MaxEngine Torque | P259 | int | [Nm] | |
| WHTCUrban | P109 | double, 4 | [-] | |
| WHTCRural | P110 | double, 4 | [-] | |
| WHTCMotorway | P111 | double, 4 | [-] | |
| BFColdHot | P159 | double, 4 | [-] | |
| CFRegPer | P192 | double, 4 | [-] | |
| CFNCV | P260 | double, 4 | [-] | |
| FuelType | P193 | string | [] | Zulässige Werte: 'Diesel CI', 'Ethanol CI', 'Petrol PI', 'Ethanol PI', 'LPG PI', 'NG PI', 'NG CI' |
Tabelle 2 Eingabeparameter 'Engine/Fullload Curve' für jeden Rasterpunkt der Volllastkurve
| Parameter name | Parameter ID | Type | Unit | Beschreibung/Referenz |
| Engine Speed | P068 | double, 2 | [1/min] | |
| MaxTorque | P069 | double, 2 | [Nm] | |
| DragTorque | P070 | double, 2 | [Nm] |
Tabelle 3 Eingabeparameter 'Engine/FuelMap' für jeden Rasterpunkt in der Kraftstoffabbildung
| Parameter name | Parameter ID | Type | Unit | Beschreibung/Referenz |
| Engine Speed | P072 | double, 2 | [1/min] | |
| Drehmoment | P073 | double, 2 | [Nm] | |
| FuelConsumption | P074 | double, 2 | [g/h] |
| Wichtige Auswertungsschritte und Gleichungen des Motorvorbehandlungsinstruments | Anlage 8 |
Diese Anlage enthält eine Beschreibung der wichtigsten Auswertungsschritte und der Gleichungen, die dem Motorvorbehandlungsinstrument als Grundlage dienen. Die folgenden Schritte werden bei der Auswertung der Eingabedaten in der angegebenen Reihenfolge ausgeführt:
1. Einlesen der Eingabedateien und automatisches Prüfen der Eingabedaten
1.1. Überprüfen der Eingabedaten hinsichtlich der Anforderungen gemäß Begriffsbestimmungen in Absatz 6.1 dieses Anhangs
1.2. Überprüfen der aufgezeichneten FCMC-Daten hinsichtlich der Anforderungen gemäß Festlegungen in Absatz 4.3.5.2 und Absatz 4.3.5.5 Ziffer 1 dieses Anhangs
2. Berechnen der charakteristischen Motordrehzahlen anhand der Volllastkurven des Stammmotors und des zu zertifizierenden Motors gemäß Festlegungen in Absatz 4.3.5.2.1 dieses Anhangs
3. Bearbeiten der Abbildung des Kraftstoffverbrauchs (FC)
3.1. Die FC-Werte bei nidlewerden zur Motordrehzahl (nidle - 100 U/min) in der Abbildung kopiert
3.2. Die FC-Werte bei n95h werden zur Motordrehzahl (n95h + 500 U/min) in der Abbildung kopiert
3.3. Extrapolation der FC-Werte bei allen Motordrehzahl-Einstellpunkten auf einen Drehmomentwert des 1,1-Fachen von Tmax_overall, und zwar durch lineare Regression der Fehlerquadratmethode auf Grundlage der drei gemessenen FC-Punkte mit den höchsten Drehmomentwerten bei jedem Motordrehzahl-Einstellpunkt in der Abbildung
3.4. Addieren von FC = 0 für die interpolierten Schiebebetrieb-Drehmomentwerte bei allen Motordrehzahl-Einstellpunkten in der Abbildung
3.5. Addieren von FC = 0 für ein Minimum der interpolierten Schiebebetrieb-Drehmomentwerte aus Unterziffer (3.4) minus 100 Nm bei allen Motordrehzahl-Einstellpunkten in der Abbildung
4. Simulation von FC und Zyklusarbeit über die WHTC-Prüfung und die jeweiligen Teilzyklen für den zu zertifizierenden Motor
4.1. WHTC-Referenzpunkte werden anhand der Eingaben für die Volllastkurve in der ursprünglich aufgezeichneten Auflösung entnormiert
4.2. FC wird für die entnormierten WHTC-Referenzwerte für die Motordrehzahl und das Drehmoment aus Ziffer 4.1 berechnet
4.3. Für die Berechnung von FC wird als Motorträgheit "0" verwendet
4.4. Für die Berechnung von FC wird eine aktive Standard-PT1-Funktion (wie bei der allgemeinen Fahrzeugsimulation) für das Ansprechverhalten des Motordrehmoments verwendet
4.5. Für FC wird bei allen Schiebebetriebpunkten "0" festgelegt
4.6. Die Berechnung von FC für alle Punkte bei nicht im Schiebebetrieb laufendem Motor erfolgt anhand der FC-Abbildung durch das Delaunay-Interpolationsverfahren (wie bei der allgemeinen Fahrzeugsimulation)
4.7. Die Berechnung von Zyklusarbeit und FC erfolgt anhand der Gleichungen laut Absatz 5.1 und Absatz 5.2 dieses Anhangs
4.8. Die Berechnung der simulierten spezifischen FC-Werte erfolgt analog zu den Gleichungen laut Absatz 5.3.1 und 5.3.2 dieses Anhangs für die gemessenen Werte
5. Berechnung der WHTC-Korrekturfaktoren
5.1. Die gemessenen Werte aus der Eingabe in das Vorbehandlungsinstrument und die simulierten Werte aus Absatz 4 werden entsprechend den Gleichungen laut den Ziffernn 5.2 bis 5.4 verwendet
5.2. CFUrban = SFCmeas,Urban / SFCsimu,Urban
5.3. CFRural = SFCmeas,Rural / SFCsimu,Rural
5.4. CFMW= SFCmeas,MW / SFCsimu,MW
5.5. Für den Fall, dass der berechnete Wert für einen Korrekturfaktor weniger als 1 beträgt, wird für den betreffenden Korrekturfaktor "1" festgelegt
6. Berechnung des Kalt-Warm-Emissionsausgleichsfaktors
6.1. Dieser Faktor wird anhand der Gleichung laut Absatz 6.2 berechnet
6.2. BFcoldhot = 1 + 0,1 × (SFCmeas,cold - SFCmeas,hot) / SFCmeas,hot
6.3. Für den Fall, dass der berechnete Wert für diesen Faktor weniger als 1 beträgt, wird für ihn "1" festgelegt
7. Korrektur der FC-Werte in der FC-Abbildung auf den Standard-Nettoheizwert
7.1. Diese Korrektur wird anhand der Gleichung laut Absatz 7.2 vorgenommen
7.2. FCcorrected = FCmeasured,map × NCVmeas/ NVCstd
7.3. FCmeasured,map sei der FC-Wert in den Eingabedaten der FC-Abbildung, bearbeitet gemäß Absatz 3
7.4. NCVmeasund NVCstd muss entsprechend Absatz 5.3.3.1 dieses Anhangs festgelegt werden
7.5. Für den Fall, dass bei der Prüfung der Bezugskraftstoff des Typs B7 (Diesel/CI) entsprechend Absatz 3.2 dieses Anhangs verwendet wurde, wird die Korrektur gemäß den Absätzen 7.1 bis 7.4 nicht vorgenommen.
8. Umwandlung der Werte für die Motorvolllast und das Schiebebetriebsdrehmoment des zu zertifizierenden Motors in eine Messrate für die Motordrehzahl von 8 U/min19
8.1. Wenn die durchschnittliche Messrate für die Motordrehzahl der ursprünglich aufgezeichneten Volllastkurve kleiner als 6 ist, erfolgt die Umwandlung durch arithmetische Mittelung über Intervalle von ± 4 U/min des gegebenen Einstellpunkts für die Ausgabedaten, und zwar anhand der Eingaben für die Volllastkurve in der ursprünglich aufgezeichneten Auflösung. Wenn die durchschnittliche Messrate für die Motordrehzahl der ursprünglich aufgezeichneten Volllastkurve größer oder gleich 6 ist, erfolgt die Umwandlung durch lineare Interpolation, und zwar anhand der Eingaben für die Volllastkurve in der ursprünglich aufgezeichneten Auflösung.
| Überprüfung der Daten zu Getriebe, Drehmomentwandler, sonstigen Drehmoment übertragenden Bauteilen und zusätzlichen Bauteilen des Antriebsstrangs | Anhang VI |
1. Einleitung
Dieser Anhang enthält eine Beschreibung der Zertifizierungsvorschriften hinsichtlich der Drehmomentverluste von Getrieben, Drehmomentwandlern (torque converter, TC), sonstigen Drehmoment übertragenden Bauteilen (other torque transferring components, OTTC) und zusätzlichen Bauteilen des Antriebsstrangs (additional driveline components, ADC) für schwere Nutzfahrzeuge. Außerdem werden darin Berechnungsverfahren für die Pauschal-Drehmomentverluste festgelegt.
Drehmomentwandler (TC), sonstige Drehmoment übertragende Bauteile (OTTC) und zusätzliche Bauteile des Antriebsstrangs (ADC) können in Kombination mit einem Getriebe oder als selbstständige Einheit geprüft werden. Falls die genannten Bauteile als selbstständige Einheiten geprüft werden, gelten die Bestimmungen der Absätze 4, 5 und 6. Drehmomentverluste durch den Antriebsmechanismus zwischen dem Getriebe und den genannten Bauteilen können vernachlässigt werden.
2. Begriffsbestimmungen
Für die Zwecke dieses Anhangs bezeichnet der Begriff
3. Prüfverfahren für Getriebe
Zur Prüfung der Verluste eines Getriebes muss die Abbildung der Drehmomentverluste für jede einzelne Getriebeart gemessen werden. Getriebe können zu Familien mit ähnlichen oder gleichen CO2-relevanten Daten gemäß den Bestimmungen in Anlage 6 dieses Anhangs zusammengefasst werden.
Zur Bestimmung der Drehmomentverluste eines Getriebes muss der Antragsteller für die Zertifizierung eines der folgenden Verfahren für jeden Vorwärtsgang (Kriechgänge ausgenommen) anwenden:
3.1. Option 1: Messung der drehmomentunabhängigen Verluste, Berechnung der drehmomentabhängigen Verluste
Der Drehmomentverlust Tl,inan der Eingangswelle des Getriebes wird wie folgt berechnet:
Tl,in (nin, Tin, gear) = Tl,in,min_loss + fT * Tin + floss_corr * Tin + Tl,in,min_el + fel_corr * Tin
Der Korrekturfaktor für die drehmomentabhängigen hydraulischen Drehmomentverluste wird wie folgt berechnet:
floss_corr = (Tl,in,max - Tl,in,min_loss) / Tmax,in
Der Korrekturfaktor für die drehmomentabhängigen elektrischen Drehmomentverluste wird wie folgt berechnet:
fel_corr = (Tl,in,max_el - Tl,in,min_el) / Tmax,in
Der durch die Leistungsaufnahme von elektrischen Getriebe-Hilfseinrichtungen verursachte Drehmomentverlust an der Eingangswelle des Getriebes wird wie folgt berechnet:

dabei gilt:
| Tl,in | = | Drehmomentverlust, bezogen auf die Eingangswelle [Nm] |
| Tl,in,min_loss | = | Drehmomentunabhängiger Verlust bei minimalem hydraulischen Verlust (minimaler Hauptdruck, Kühl-/Schmiermitteldurchsatz usw.), gemessen mit einer frei rotierenden Ausgangswelle aus der Prüfung ohne Last [Nm] |
| Tl,in,max_loss | = | Drehmomentunabhängiger Verlust bei maximalem hydraulischen Verlust (maximaler Hauptdruck, Kühl-/Schmiermitteldurchsatz usw.), gemessen mit einer frei rotierenden Ausgangswelle aus der Prüfung ohne Last [Nm] |
| floss_corr | = | Korrektur des hydraulischen Verlusts in Abhängigkeit vom Eingangsdrehmoment [-] |
| nin | = | Drehzahl an der Eingangswelle des Getriebes (ggf. dem Drehmomentwandler nachgeschaltet) [U/min] |
| fT | = | Drehmomentverlustkoeffizient = 1-ηT |
| Tin | = | Drehmoment an der Eingangswelle [Nm] |
| ·T | = | Drehmomentabhängiger Wirkungsgrad (zu berechnen); bei einem direkten Gang fT = 0,007 (ηT= 0,993) [-] |
| fel_corr | = | Korrektur des Verlusts der elektrischen Leistung in Abhängigkeit des Eingangsdrehmoments [-] |
| Tl,in,el | = | Durch Stromverbraucher verursachter zusätzlicher Drehmomentverlust an der Eingangswelle [Nm] |
| Tl,in,min_el | = | Durch Stromverbraucher verursachter zusätzlicher Drehmomentverlust an der Eingangswelle bei minimaler elektrischer Leistung [Nm] |
| Tl,in,max_el | = | Durch Stromverbraucher verursachter zusätzlicher Drehmomentverlust an der Eingangswelle bei maximaler elektrischer Leistung [Nm] |
| Pel | = | Elektrische Leistungsaufnahme durch Stromverbraucher im Getriebe, gemessen bei der Prüfung der Verluste des Getriebes [W] |
| Tmax,in | = | Maximal zulässiges Eingangsdrehmoment für alle Vorwärtsgänge des Getriebes [Nm] |
3.1.1. Die drehmomentabhängigen Verluste eines Getriebesystems müssen gemäß folgender Beschreibung ermittelt werden:
Mehrere parallele Leistungsflüsse mit gleicher Nennleistung, etwa bei Doppelvorgelegewellen oder mehreren Planetenrädern in einem Planetengetriebe, können in diesem Abschnitt als ein Leistungsfluss behandelt werden.
3.1.1.1. Für jeden indirekten Gang g herkömmlicher Getriebe ohne Leistungsteilung und mit gewöhnlichem Aufbau (kein Planetengetriebe) müssen folgende Schritte durchgeführt werden:
3.1.1.2. Für jeden aktiven Zahneingriff ist als drehmomentabhängiger Wirkungsgrad jeweils ein konstanter Wert für hm festzulegen:
| Zahneingriffe außenaußen: | ηm = 0,986 |
| Zahneingriffe außeninnen: | ηm = 0,993 |
| Zahneingriffe an Winkelgetrieben: | ηm = 0,97 |
(Winkelgetriebeverluste können alternativ durch eine gesonderte Prüfung gemäß Nummer 6 dieses Anhangs ermittelt werden)
3.1.1.3. Das Produkt dieser drehmomentabhängigen Wirkungsgrade aktiver Zahneingriffe ist mit dem drehmomentabhängigen Lagerwirkungsgrad ηb= 99,5 % zu multiplizieren.
3.1.1.4. Der drehmomentabhängige GesamtwirkungsgradηTg von Gang g wird wie folgt berechnet:
ηTg = ηb * ηm,1 * ηm,2 * [...] * ηm,n
3.1.1.5. Der drehmomentabhängige VerlustkoeffizientfTgvon Gang g wird wie folgt berechnet:
fTg = 1 - ηTg
3.1.1.6. Der drehmomentabhängige Verlust Tl,in Tgan der Eingangswelle für Gang g wird wie folgt berechnet:
Tl,in Tg =fTg *Tin
3.1.1.7. Der drehmomentabhängige Wirkungsgrad des Planetennachschaltgetriebes in einer niedrigen Ganggruppe kann für den Sonderfall, dass das Getriebe aus einem vorgelegewellenartigen Basisgetriebe und einem dazu in Reihe geschalteten Planetennachschaltgetriebe (mit nichtrotierendem Außenrad und mit der Ausgangswelle verbundenem Planetenträger) besteht, alternativ zu dem in Absatz 3.1.1.8 beschriebenen Verfahren wie folgt berechnet werden:

dabei gilt:
| ηm,ring | = | Drehmomentabhängiger Wirkungsgrad des Zahneingriffs von Außen- zu Planetenrad = 99,3 % [-] |
| ηm,sun | = | Drehmomentabhängiger Wirkungsgrad des Zahneingriffs von Planeten- zu Sonnenrad = 98,6 % [-] |
| zsun | = | Anzahl der Zähne des Sonnenrads des Nachschaltgetriebes [-] |
| zring | = | Anzahl der Zähne des Außenrads des Nachschaltgetriebes [-] |
Das Planetennachschaltgetriebe gilt als zusätzlicher Zahneingriff im Vorgelegewelle-Basisgetriebe, und sein drehmomentabhängiger Wirkungsgradηlowrange muss bei der Ermittlung der drehmomentabhängigen GesamtwirkungsgradeηTg der niedrigen Gänge in die Berechnung gemäß Absatz 3.1.1.4 einbezogen werden.
3.1.1.8. Bei allen anderen Getriebearten mit komplexeren Leistungsteilungen und/oder Planetengetrieben (z.B. bei einem herkömmlichen automatischen Planetengetriebe) muss das folgende vereinfachte Verfahren zur Ermittlung des drehmomentabhängigen Wirkungsgrads angewandt werden. Dieses Verfahren gilt für Getriebesysteme mit herkömmlichem Aufbau (kein Planetengetriebe) und/oder für Planetengetriebe, die aus Außen-, Planeten- und Sonnenrädern bestehen. Alternativ kann der drehmomentabhängige Wirkungsgrad auf Grundlage der VDI-Richtlinie Nr. 2157 berechnet werden. Bei beiden Berechnungen muss derselbe konstante Wert für den Wirkungsgrad des Zahneingriffs gemäß Absatz 3.1.1.2 verwendet werden.
In diesem Fall sind für jeden indirekten Gang g die folgenden Schritte durchzuführen:
3.1.1.9. Unter der Bedingung, dass als Eingangsdrehzahl 1 rad/s und als Eingangsdrehmoment 1 Nm gelten, wird eine Tabelle mit Werten für die Drehzahl (Ni) und das Drehmoment (Ti) für alle Zahnräder mit fester Drehachse (Sonnenräder, Außenräder und gewöhnliche Zahnräder) sowie Planetenträger erzeugt. Die Drehzahl- und Drehmomentwerte müssen der Rechte-Hand-Regel folgen, wobei für die Motordrehung die positive Richtung gilt.
3.1.1.10. Für jedes Planetengetriebe werden die Relativgeschwindigkeiten Sonnenradzu-Planetenträger und Außenradzu-Planetenträger wie folgt berechnet:
Nsuncarrier = Nsun - Ncarrier
Nringcarrier = Nring - Ncarrier
dabei gilt:
| Nsun= | Drehgeschwindigkeit des Sonnenrads [rad/s] |
| Nring= | Drehgeschwindigkeit des Außenrads [rad/s] |
| Ncarrier = | Drehgeschwindigkeit des Planetenträgers [rad/s] |
3.1.1.11. Die Verluste verursachenden Leistungen an den Zahneingriffen sind wie folgt zu berechnen:
Für jedes Getriebe mit gewöhnlichem Aufbau (kein Planetengetriebe) wird die Leistung P wie folgt berechnet:
P1 = N1 · T1
P2 = N2 · T2
dabei gilt:
| P = | Leistung am Zahneingriff [W] |
| N = | Drehgeschwindigkeit des Zahnrads [rad/s] |
| T = | Drehmoment des Zahnrads [Nm] |
Für jedes Planetengetriebe wird die virtuelle Leistung von Sonnenrad Pv,sun und Außenrad Pv,ring wie folgt berechnet:
Pv,sun = Tsun · (Nsun - Ncarrier) = Tsun · Nsun/carrier
Pv,ring = Tring· (Nring - Ncarrier) = Tring · Nring/carrier
dabei gilt:
| Pv,sun = | Virtuelle Leistung des Sonnenrads [W] |
| Pv,ring = | Virtuelle Leistung des Außenrads [W] |
| Tsun = | Drehmoment des Sonnenrads [Nm] |
| Tcarrier = | Drehmoment des Planetenträgers [Nm] |
| Tring = | Drehmoment des Außenrads [Nm] |
Ein negativer Leistungswert kennzeichnet die Leistung am Getriebeausgang, ein positiver Leistungswert kennzeichnet die Leistung am Getriebeeingang.
Die verlustbereinigten LeistungenPadj an den Zahneingriffen sind wie folgt zu berechnen:
Für jedes Getriebe mit gewöhnlichem Aufbau (kein Planetengetriebe) ist die negative Leistung mit dem entsprechenden drehmomentabhängigen Wirkungsgradηm zu multiplizieren:
Pi > 0 => Pi,adj = Pi
Pi < 0 => Pi,adj = Pi · ηmi
dabei gilt:
| Padj = | Verlustbereinigte Leistungen an den Zahneingriffen [W] |
| ηm = | Drehmomentabhängiger Wirkungsgrad (entsprechend dem Zahneingriff; siehe Absatz 3.1.1.2) [-] |
Für jedes Planetengetriebe ist die negative virtuelle Leistung mit den drehmomentabhängigen Wirkungsgraden für Sonnen- zu Planetenrad ηmsunund für Außen- zu Planetenrad ηmsun zu multiplizieren:
Pν,i ≥ 0 => Pi,adj = Pν,i
Pν,i < 0 => Pi,adj = Pi · ηmsun · ηmring
dabei gilt:
| ηmsun = | Drehmomentabhängiger Wirkungsgrad für Sonnen- zu Planetenrad [-] |
| ηmring = | Drehmomentabhängiger Wirkungsgrad für Außen- zu Planetenrad [-] |
3.1.1.12. Alle verlustbereinigten Leistungswerte sind zu addieren, um so den drehmomentabhängigen Leistungsverlust Pm,loss am Zahneingriff des die Eingangsleistung betreffenden Getriebesystems zu erhalten:
Pm,loss= ΣPi,adj
dabei gilt:
| i | = Alle Zahnräder mit fester Drehachse [-] |
| Pm,loss | = Drehmomentabhängiger Leistungsverlust am Zahneingriff des Getriebesystems [W] |
3.1.1.13. Der drehmomentabhängige Verlustkoeffizient für Lager und der drehmomentabhängige Verlustkoeffizient für den Zahneingriff
fT,bear = 1 -ηbear = 1 - 0,995 = 0,005
sind zu addieren, um so den drehmomentabhängigen

Gesamt-VerlustkoeffizientenfT für das Getriebesystem zu erhalten:
fT= fT,gearmesh+ fT,bear
dabei gilt:
| fT | = Drehmomentabhängiger Gesamt-Verlustkoeffizient für das Getriebesystem [-] |
| fT,bear | = Drehmomentabhängiger Verlustkoeffizient für die Lager [-] |
| fT,gearmesh | = Drehmomentabhängiger Verlustkoeffizient für die Zahneingriffe [-] |
| Pin | = Feste Eingangsleistung des Getriebes; Pin = (1 Nm * 1 rad/s) [W] |
3.1.1.14. Die drehmomentabhängigen Verluste an der Eingangswelle des betreffenden Getriebes sind wie folgt zu berechnen:
Tl,inT = fT * Tin
dabei gilt:
| Tl,inT | = Drehmomentabhängiger Drehmomentverlust, bezogen auf die Eingangswelle [Nm] |
| Tin | = Drehmoment an der Eingangswelle [Nm] |
3.1.2. Die drehmomentunabhängigen Verluste sind entsprechend dem nachfolgend beschriebenen Verfahren zu messen.
3.1.2.1. Allgemeine Anforderungen19
Das für die Messungen verwendete Getriebe muss den Zeichnungsvorgaben für Seriengetriebe entsprechen und neu sein.
Änderungen am Getriebe sind zulässig, wenn sie mit dem Ziel vorgenommen werden, dass das Getriebe die in diesem Anhang genannten Prüfanforderungen erfüllt, z.B. zur Anbringung von Messsensoren oder zur Anpassung eines externen Ölkonditionierungssystems.
Die Toleranzgrenzen in diesem Abschnitt beziehen sich auf Messwerte ohne Sensorunsicherheiten.
Die pro Bestimmungsfahrzeugteil und Gang geprüfte Gesamtzeit darf das 5-Fache der tatsächlichen Prüfzeit pro Gang nicht überschreiten (erforderlichenfalls darf das Getriebe bei Mess- oder Aufbaufehlern erneut geprüft werden).
Dasselbe Bestimmungsfahrzeugteil darf für maximal zehn verschiedene Prüfungen verwendet werden, z.B. für Prüfungen der Drehmomentverluste des Getriebes bei Varianten mit und ohne Dauerbremseinrichtung (mit unterschiedlichen Temperaturanforderungen) oder mit unterschiedlichen Ölen. Wird dasselbe Bestimmungsfahrzeugteil für Prüfungen unterschiedlicher Öle verwendet, muss das empfohlene, ab Werk eingefüllte Öl zuerst geprüft werden.
Dieselbe Prüfung mehrmals durchzuführen, um die Prüfserie mit den besten Ergebnissen auszuwählen, ist nicht zulässig.
Auf Verlangen der Genehmigungsbehörde muss der Antragsteller für die Zertifizierung erklären und nachweisen, dass die in diesem Anhang aufgeführten Anforderungen erfüllt sind.
3.1.2.2. Differenzmessungen
Um Einflussgrößen, die durch den Prüfstandsaufbau (z.B. Lager, Kupplungen) bedingt sind, von den gemessenen Drehmomentverlusten abzuziehen, sind Differenzmessungen zulässig, in deren Rahmen sich diese parasitären Drehmomente ermitteln lassen. Die Messungen müssen bei denselben Drehzahlstufen und denselben Prüfstandslagertemperaturen ± 3 K wie bei der eigentlichen Prüfung durchgeführt werden. Die Messunsicherheit des Drehmomentsensors muss weniger als 0,3 Nm betragen.
3.1.2.3. Einlaufen
Auf Ersuchen des Antragstellers kann das Getriebe einem Einlaufverfahren unterzogen werden. Folgende Bestimmungen gelten für ein Einlaufverfahren:
3.1.2.3.1 Pro Gang darf das Verfahren nicht länger als 30 Stunden und insgesamt nicht länger als 100 Stunden dauern.
3.1.2.3.2 Die Anwendung des Eingangsdrehmoments ist auf 100 % des maximalen Eingangsdrehmoments beschränkt.
3.1.2.3.3 Die maximale Eingangsdrehzahl ist durch die angegebene maximale Drehzahl des Getriebes beschränkt.
3.1.2.3.4 Die Drehzahl und der Drehmomentverlauf für das Einlaufverfahren werden vom Hersteller festgelegt.
3.1.2.3.5 Das Einlaufverfahren muss vom Hersteller im Hinblick auf Laufzeit, Drehzahl, Drehmoment und Öltemperatur dokumentiert und der Genehmigungsbehörde mitgeteilt werden.
3.1.2.3.6 Die Anforderungen bezüglich der Umgebungstemperatur (Absatz 3.1.2.5.1), der Messgenauigkeit (Absatz 3.1.4), der Prüfanordnung (Absatz 3.1.8) und des Einbauwinkels (Absatz 3.1.3.2) gelten nicht für das Einlaufverfahren.
3.1.2.4. Vorkonditionierung
3.1.2.4.1 Es ist zulässig, das Getriebe und die Prüfstandseinrichtungen vorzukonditionieren, damit vor dem Einlauf- und Prüfverfahren die richtige Temperatur erreicht und aufrechterhalten wird.
3.1.2.4.2 Die Vorkonditionierung ist am direkten Gang durchzuführen, ohne dass an der Ausgangswelle ein Drehmoment anliegt. Verfügt das Getriebe über keinen direkten Gang, ist der Gang zu verwenden, dessen Verhältnis einem Verhältnis von 1:1 am nächsten kommt.
3.1.2.4.3 Die maximale Eingangsdrehzahl ist durch die angegebene maximale Drehzahl des Getriebes beschränkt.
3.1.2.4.4 Die Gesamtzeit für die Vorkonditionierung darf bei einem Getriebe höchstens 50 Stunden betragen. Da die komplette Prüfung eines Getriebes in mehrere Prüfsequenzen unterteilt werden kann (z.B. kann jeder Gang mit einer individuellen Sequenz geprüft werden), kann auch die Vorkonditionierung in mehrere Sequenzen unterteilt werden. Die Dauer einer einzelnen Vorkonditionierungssequenz darf jedoch höchstens 60 Minuten betragen.
3.1.2.4.5 Die Zeit für die Vorkonditionierung darf nicht zu der Zeitspanne hinzugerechnet werden, die für das Einlaufen oder das Prüfverfahren vorgesehen ist.
3.1.2.5. Prüfbedingungen
3.1.2.5.1 Umgebungstemperatur
Die bei der Prüfung herrschende Umgebungstemperatur muss in einem Bereich von 25 °C ± 10 K liegen.
Die Messung der Umgebungstemperatur muss 1 m seitlich neben dem Getriebe erfolgen.
Der für die Umgebungstemperatur angegebene Grenzwert gilt nicht für das Einlaufverfahren.
3.1.2.5.2 Öltemperatur
Mit Ausnahme des Öls ist keine externe Beheizung zulässig.
Während der Messung (außer in der Stabilisierungsphase) gelten folgende Temperaturgrenzwerte:
Bei SMT/AMT/DCT-Getrieben darf die Öltemperatur am Ablassstopfen bei Messungen ohne Dauerbremseinrichtung höchstens 83 °C und bei Messungen mit am Getriebe montierter Dauerbremseinrichtung höchstens 87 °C betragen. Für den Fall, dass Messungen eines Getriebes ohne Dauerbremseinrichtung mit gesonderten Messungen einer Dauerbremseinrichtung kombiniert werden, gilt der geringere Temperaturgrenzwert, damit der Antriebsmechanismus der Dauerbremseinrichtung und das Übersetzungsgetriebe sowie - bei abschaltbarer Dauerbremseinrichtung - die Kupplung ausgeglichen werden können.
Bei Drehmomentwandler-Planetengetrieben und bei Getrieben mit mehr als zwei Reibungskupplungen darf die Öltemperatur am Ablassstopfen ohne Dauerbremseinrichtung höchstens 93 °C und mit Dauerbremseinrichtung höchstens 97 °C betragen.
Damit die vorgenannten höheren Temperaturgrenzwerte auf Prüfungen mit Dauerbremseinrichtung angewandt werden dürfen, muss die Dauerbremseinrichtung im Getriebe integriert sein oder ein integriertes Kühl- oder Ölsystem im Getriebe nutzen.
Für das Einlaufen gelten dieselben Vorgaben für die Öltemperatur wie für die reguläre Prüfung.
Unter folgenden Bedingungen sind für die Öltemperatur außerordentliche Spitzenwerte von bis zu 110 °C zulässig:
Die Öltemperatur ist am Ablassstopfen oder im Ölsumpf zu messen.
3.1.2.5.3 Ölqualität
Für die Prüfung ist neues, für den europäischen Markt empfohlenes Öl für die erste Befüllung zu verwenden. Für die Drehmomentmessungen darf dieselbe Ölfüllung verwendet werden wie für das Einlaufen.
3.1.2.5.4 Ölviskosität
Gibt es mehrere Empfehlungen für die erste Ölbefüllung, werden sie gleichwertig behandelt, sofern sich ihre jeweilige kinematische Viskosität bei gleicher Temperatur um nicht mehr als 10 % voneinander unterscheidet (innerhalb des angegebenen Toleranzbereichs für KV100). Bei einem Öl mit geringerer Viskosität als bei dem in der Prüfung verwendeten Öl wird angenommen, dass die Verluste bei Prüfungen mit dieser Option niedriger ausfallen. Bei zusätzlichen Ölsorten für die erste Befüllung muss die Viskosität entweder in den vorgenannten 10-%-Toleranzbereich fallen oder geringer sein als bei dem in der Prüfung verwendeten Öl, damit für sie dieselbe Zertifizierung gilt.
3.1.2.5.5 Ölstand und Ölkonditionierung
Der Ölstand muss den für das Getriebe geltenden Vorgaben genügen.
Kommt ein externes Ölkonditionierungssystem zum Einsatz, muss eine solche Menge Öl im Getriebe aufrechterhalten werden, die dem angegebenen Ölstand entspricht.
Um sicherzustellen, dass sich das externe Ölkonditionierungssystem nicht auf die Prüfergebnisse auswirkt, muss ein Prüfpunkt einmal mit eingeschaltetem und einmal mit ausgeschaltetem Konditionierungssystem gemessen werden. Die Abweichung zwischen diesen beiden Messungen des Drehmomentverlusts (= Eingangsdrehmoment) muss unter 5 % liegen. Der Prüfpunkt ist wie folgt definiert:
Bei Getrieben mit hydraulischer Druckregelung oder intelligentem Schmiersystem muss die Messung der drehmomentunabhängigen Verluste mit zwei verschiedenen Einstellungen erfolgen: einmal bei einem eingestelltem Getriebesystemdruck von mindestens dem Wert, der bei eingekuppeltem Gang gilt, und ein zweites Mal bei höchstmöglichem Hydraulikdruck (siehe Absatz 3.1.6.3.1).
3.1.3. Montage
3.1.3.1. Die elektrische Maschine und der Drehmomentsensor müssen an die Eingangsseite des Getriebes montiert werden. Die Ausgangswelle muss sich ungehindert drehen können.
3.1.3.2. Beim Einbau in das Fahrzeug muss für das Getriebe ein Neigungswinkel gemäß Homologationszeichnung von ± 1° bzw. von 0° ± 1° eingehalten werden.
3.1.3.3. Die interne Ölpumpe muss im Getriebe enthalten sein.
3.1.3.4. Ist bei dem betreffenden Getriebe der Einsatz eines Ölkühlers optional oder erforderlich, gilt für die Prüfung, dass der Kühler ausgeschlossen oder ein anderer Ölkühler verwendet werden darf.
3.1.3.5. Die Prüfung des Getriebes kann mit oder ohne Nebenabtriebs-Antriebsmechanismus und/oder Nebenabtrieb erfolgen. Zur Ermittlung der Leistungsverluste des Nebenabtriebs und/oder des Nebenabtriebs-Antriebsmechanismus werden die Werte aus Anhang VII dieser Verordnung angewandt. Bei diesen Werten wird davon ausgegangen, dass das Getriebe ohne Nebenabtriebs-Antriebsmechanismus und/oder Nebenabtrieb geprüft wird.
3.1.3.6. Die Messung des Getriebes kann mit oder ohne montierte Einzel-Trockenkupplung (mit einer oder zwei Scheiben) erfolgen. Bei anderen Kupplungstypen muss die Prüfung mit montierter Kupplung erfolgen.
3.1.3.7. Der Einfluss der jeweiligen parasitären Lasten muss für jeden einzelnen Prüfstandsaufbau und jeden einzelnen Drehmomentsensor gemäß der Beschreibung in Absatz 3.1.8 berechnet werden.
3.1.4. Messeinrichtungen
Die Anlagen des Kalibrierlabors müssen die Anforderungen von ISO/TS 16949, der ISO 9000 Reihen oder ISO/IEC 17025 erfüllen. Sämtliche Laboreinrichtungen für Referenzmessungen, die zur Kalibrierung und/oder Überprüfung verwendet werden, müssen auf nationale (internationale) Normen zurückführbar sein.
3.1.4.1. Drehmoment
Die Messunsicherheit des Drehmomentsensors muss weniger als 0,3 Nm betragen.
Der Einsatz von Drehmomentsensoren mit höheren Messunsicherheiten ist dann zulässig, wenn sich der Teil der Unsicherheit, der 0,3 Nm überschreitet, errechnen lässt und zum gemessenen Drehmomentverlust gemäß der Beschreibung in Absatz 3.1.8 (Messunsicherheit) hinzugerechnet wird.
3.1.4.2. Drehzahl
Die Unsicherheit der Drehzahlsensoren darf höchstens ± 1 U/min betragen.
3.1.4.3. Temperatur
Die Unsicherheit der für die Messung der Umgebungstemperatur eingesetzten Temperatursensoren darf höchstens ± 1,5 K betragen.
Die Unsicherheit der für die Messung der Öltemperatur eingesetzten Temperatursensoren darf höchstens ± 1,5 K betragen.
3.1.4.4. Druck
Die Unsicherheit der Drucksensoren darf höchstens 1 % des maximal gemessenen Drucks betragen.
3.1.4.5. Spannung
Die Unsicherheit des Spannungsmessers darf höchstens 1 % der maximal gemessenen Spannung betragen.
3.1.4.6. Elektrische Stromstärke
Die Unsicherheit des Strommessers darf höchstens 1 % der maximal gemessenen Stromstärke betragen.
3.1.5. Messsignale und Datenaufzeichnung
Mindestens folgende Signale müssen während der Messung aufgezeichnet werden:
Ist das Getriebe mit einem Gangschaltungs- und/oder Kupplungssystem mit hydraulischer Druckregelung oder aber mit einem mechanisch angetriebenen intelligenten Schmiersystem ausgestattet, ist zusätzlich Folgendes aufzuzeichnen:
Ist das Getriebe mit einer elektrischen Getriebe-Hilfseinrichtung ausgestattet, ist zusätzlich Folgendes aufzuzeichnen:
Bei Differenzmessungen zum Ausgleich von Einflussgrößen, die durch den Prüfstandsaufbau bedingt sind, ist zusätzlich Folgendes aufzuzeichnen:
Die Abtast- und Aufzeichnungsrate muss mindestens 100 Hz betragen.
Um Messfehler möglichst gering zu halten, ist ein Tiefpassfilter zu verwenden.
3.1.6. Prüfverfahren
3.1.6.1. Kompensation Nulldrehmomentsignal:
Das Nullsignal der Drehmomentsensoren ist zu messen. Zum Zwecke der Messung müssen die Sensoren in den Prüfstand montiert werden. Am Antriebsstrang des Prüfstands (Eingang und Ausgang) darf keine Last anliegen. Die gemessene Signalabweichung vom Nullwert ist auszugleichen.
3.1.6.2. Drehzahlbereich:
Für folgende Drehzahlstufen ist der Drehmomentverlust zu messen (Drehzahl der Eingangswelle): 600, 900, 1.200, 1.600, 2.000, 2.500, 3.000 [...] U/min bis zur höchsten Drehzahl pro Gang gemäß Getriebespezifikationen oder bis zur letzten Drehzahlstufe vor der festgelegten maximalen Drehzahl.
Die Drehzahlübergangsphase (Zeit für den Wechsel zwischen zwei Drehzahlstufen) darf höchstens 20 Sekunden dauern.
3.1.6.3. Messsequenz:
3.1.6.3.1 Ist das Getriebe mit einem intelligenten Schmiersystem und/oder mit elektrischen Getriebe-Hilfseinrichtungen ausgestattet, muss die Messung mit zwei verschiedenen Messeinstellungen dieser Systeme erfolgen:
Die erste Messsequenz (Absätze 3.1.6.3.2 bis 3.1.6.3.4) muss durchgeführt werden, wenn für das hydraulische und elektrische System beim Betrieb im Fahrzeug die geringste Leistungsaufnahme zu verzeichnen ist (geringer Verlust).
Die zweite Messsequenz muss durchgeführt werden, wenn die Systeme so eingestellt sind, dass die höchstmögliche Leistungsaufnahme beim Betrieb im Fahrzeug zu verzeichnen ist (hoher Verlust).
3.1.6.3.2 Die Messungen müssen so durchgeführt werden, dass mit der niedrigsten Drehzahl begonnen und mit der höchsten Drehzahl geendet wird.
3.1.6.3.3 Bei jeder Drehzahlstufe sind mindestens 5 Sekunden zur Stabilisierung innerhalb der in Absatz 3.1.2.5 festgelegten Temperaturgrenzwerte notwendig. Erforderlichenfalls kann die Stabilisierungszeit durch den Hersteller auf maximal 60 Sekunden verlängert werden. Während der Stabilisierung sind die Öl- und Umgebungstemperatur aufzuzeichnen.
3.1.6.3.4 Nach der Stabilisierungszeit sind die in Absatz 3.1.5 aufgeführten Messsignale 5 bis 15 Sekunden lang für den Prüfpunkt aufgezeichnet werden.
3.1.6.3.5 Jede Messung ist mit jeder Messeinstellung jeweils zweimal durchzuführen.
3.1.7. Validierung der Messwerte
3.1.7.1. Für jede der Messungen ist das arithmetische Mittel von Drehmoment, Drehzahl, (ggf.) Spannung und Stromstärke für die 5 bis 15 Sekunden langen Messungen zu berechnen.
3.1.7.2. Die gemittelte Drehzahlabweichung muss für jeden gemessenen Punkt in der gesamten Drehmomentverlustserie weniger als ± 5 U/min des Drehzahleinstellpunkts betragen.
3.1.7.3. Die mechanischen Drehmomentverluste und (ggf.) die elektrische Leistungsaufnahme werden für jede der Messungen wie folgt berechnet:
Tloss = Tin
Pel = I * U
Es ist zulässig, durch den Prüfstandsaufbau bedingte Einflussgrößen von den Drehmomentverlusten abzuziehen (Absatz 3.1.2.2).
3.1.7.4. Die mechanischen Drehmomentverluste und (gegebenenfalls) die elektrische Leistungsaufnahme aus beiden Messserien sind zu mitteln (arithmetischer Mittelwert).
3.1.7.5. Die Abweichung zwischen den gemittelten Werten für die Drehmomentverluste an beiden Messpunkten muss bei jeder Einstellung unter ± 5 % des gemittelten Werts bzw. ±1 Nm liegen, wobei der jeweils größere Wert maßgeblich ist. Dann muss das arithmetische Mittel der beiden gemittelten Leistungswerte verwendet werden.
3.1.7.6. Liegt eine größere Abweichung vor, ist der größte gemittelte Drehmomentverlust zu verwenden; alternativ kann die Prüfung für das Getriebe wiederholt werden.
3.1.7.7. Die Abweichung zwischen den gemittelten Werten für die elektrische Leistungsaufnahme (Spannung*Stromstärke) bei beiden Messungen muss bei jeder Messeinstellung unter ± 10 % des gemittelten Werts bzw. ± 5 W liegen, wobei der jeweils größere Wert maßgeblich ist. Dann ist das arithmetische Mittel der beiden gemittelten Leistungswerte zu verwenden.
3.1.7.8. Liegt eine größere Abweichung vor, sind diejenigen gemittelten Werte für die Spannung/Stromstärke zu verwenden, die der größten gemittelten Leistungsaufnahme entsprechen; alternativ kann die Prüfung für das Getriebe wiederholt werden.
3.1.8. Messunsicherheit
Der Teil der berechneten GesamtunsicherheitUT,loss, der 0,3 Nm überschreitet, muss zuTloss des gemeldeten DrehmomentverlustsTloss,rep hinzugerechnet werden. WennUT,loss kleiner als 0,3 Nm, dannTloss,rep =Tloss.
Tloss,rep = Tloss + MAX (0, (UT,loss - 0,3 Nm))
Die Gesamtunsicherheit UT,loss des Drehmomentverlusts muss anhand folgender Parameter berechnet werden:
Die Gesamtunsicherheit des Drehmomentverlusts (UT,loss) basiert auf den Unsicherheiten der Sensoren bei einem Vertraunsbereich von 95 %. Zur Berechnung wird die Quadratwurzel aus der Summe von Quadraten gezogen ("Gaußsches Fehlerfortpflanzungsgesetz").

dabei gilt:
| Tloss | = | Gemessener Drehmomentverlust (unkorrigiert) [Nm] |
| Tloss,rep | = | Gemeldeter Drehmomentverlust (nach Korrektur der Unsicherheit) [Nm] |
| UT,loss | = | Gesamte erweiterte Unsicherheit bei der Messung des Drehmomentverlusts bei einem Vertrauensbereich von 95 % [Nm] |
| UT,in | = | Unsicherheit bei der Messung des Eingangsdrehmomentverlusts [Nm] |
| uTKC | = | Durch den Temperatureinfluss bedingte Unsicherheit am Signal für das momentane Drehmoment [Nm] |
| wtkc | = | Temperatureinfluss am Signal für das momentane Drehmoment pro Kref gemäß Angaben des Sensorherstellers [%] |
| uTK0 | = | Durch den Temperatureinfluss bedingte Unsicherheit am Nulldrehmomentsignal (bezogen auf das Nenndrehmoment) [Nm] |
| wtk0 | = | Temperatureinfluss am Nulldrehmomentsignal pro Kref (bezogen auf das Nenndrehmoment) gemäß Angaben des Sensorherstellers [%] |
| Kref | = | Referenztemperaturbereich für uTKCund uTK0, wtk0 und wtkc gemäß Angaben des Sensorherstellers [K] |
| ΔK | = | Zwischen Kalibrierung und Messung vorliegende Differenz der Sensortemperatur [K]. Sollte die Sensortemperatur nicht gemessen werden können, muss der Standardwert von ΔK = 15 K verwendet werden. |
| Tc | = | Momentaner/gemessener Drehmomentwert am Drehmomentsensor [Nm] |
| Tn | = | Nenndrehmomentwert des Drehmomentsensors [Nm] |
| ucal | = | Durch die Kalibrierung des Drehmomentsensors bedingte Unsicherheit [Nm] |
| Wcal | = | Relative Kalibrierunsicherheit (bezogen auf das Nenndrehmoment) [%] |
| kcal | = | Kalibrierungsfortschrittsfaktor (sofern vom Sensorhersteller angegeben, andernfalls = 1) |
| upara | = | Durch parasitäre Lasten bedingte Unsicherheit [Nm] |
| wpara | = | senspara* ipara
Relativer Einfluss von Kräften und Biegemomenten, die durch Versatz verursacht werden |
| senspara | = | Maximaler Einfluss parasitärer Lasten auf den jeweiligen Drehmomentsensor gemäß Angaben des Sensorherstellers [%]; wurde kein spezifischer Wert für parasitäre Lasten vom Sensorhersteller angegeben, wird als Wert 1,0 % festgelegt |
| ipara | = | Maximaler Einfluss parasitärer Lasten auf den jeweiligen Drehmomentsensor in Abhängigkeit von der Prüfanordnung (A/B/C gemäß nachstehender Festlegung). |
| = | A) 10 % für den Fall, dass Lager die parasitären Lasten vor und hinter dem Sensor isolieren und dass am Sensor eine elastische Kupplung (oder Kardanwelle) funktional montiert ist (vor- oder nachgelagert); darüber hinaus können diese Lager in einer Antriebs-/Bremsmaschine (z.B. einer elektrischen Maschine) und/oder im Getriebe integriert sein, sofern die Kräfte in der Maschine und/oder im Getriebe vom Sensor ferngehalten werden. Siehe Abbildung 1.
Abbildung 1 Prüfanordnung a für Option 1 |
|
| = | B) 50 % für den Fall, dass Lager die parasitären Lasten vor und hinter dem Sensor isolieren und dass am Sensor keine elastische Kupplung funktional montiert ist; darüber hinaus können diese Lager in einer Antriebs-/Bremsmaschine (z.B. einer elektrischen Maschine) und/oder im Getriebe integriert sein, sofern die Kräfte in der Maschine und/oder im Getriebe vom Sensor ferngehalten werden. Siehe Abbildung 2.
Abbildung 2 Prüfanordnung B für Option 1 |
|
| = | C) 100 % für alle anderen Prüfaufbauten |
3.2. Option 2: Messung der drehmomentunabhängigen Verluste, Messung des Drehmomentverlusts bei maximalem Drehmoment und Interpolation der drehmomentabhängigen Verluste anhand eines linearen Modells
Bei Option 2 wird der Drehmomentverlust durch Kombination aus Messungen und linearer Interpolation ermittelt. Messungen müssen für die drehmomentunabhängigen Verluste des Getriebes und für einen Lastpunkt der drehmomentabhängigen Verluste (maximales Eingangsdrehmoment) erfolgen. Auf Grundlage der Drehmomentverluste bei Betrieb ohne Last und bei maximalem Eingangsdrehmoment müssen die Drehmomentverluste für die dazwischen liegenden Eingangsdrehmomentwerte mit Hilfe des DrehmomentverlustkoeffizientenfTlimo berechnet werden.
Der DrehmomentverlustTl,in an der Eingangswelle des Getriebes wird wie folgt berechnet:
Tl,in(nin, Tin, gear) = Tl,in,min_loss + fTlimo * Tin + Tl,in,min_el + fel_corr * Tin
Der auf dem linearen ModellfTlimo basierende Drehmomentverlustkoeffizient wird wie folgt berechnet:
fTlimo = (Tl,maxT - Tl,in,min_loss) / Tin,maxT
dabei gilt:
| Tl,in | = | Drehmomentverlust, bezogen auf die Eingangswelle [Nm] |
| Tl,in,min_loss | = | Schleppdrehmomentverlust am Getriebeeingang, gemessen mit einer frei rotierenden Ausgangswelle aus der Prüfung ohne Last [Nm] |
| nin | = | Drehzahl an der Eingangswelle [U/min] |
| fTlimo | = | Auf dem linearen Modell basierender Drehmomentverlustkoeffizient [-] |
| Tin | = | Drehmoment an der Eingangswelle [Nm] |
| Tin,maxT | = | Höchstes geprüftes Drehmoment an der Eingangswelle (normalerweise 100 % Eingangsdrehmoment, siehe Absätze 3.2.5.2 und 3.4.4) [Nm] |
| Tl,maxT | = | Drehmomentverlust in Bezug auf die Eingangswelle bei Tin = Tin,maxT |
| fel_corr | = | Korrektur des Verlusts der elektrischen Leistung in Abhängigkeit vom Eingangsdrehmoment [-] |
| Tl,in,el | = | Durch Stromverbraucher verursachter zusätzlicher Drehmomentverlust an der Eingangswelle [Nm] |
| Tl,in,min_el | = | Durch Stromverbraucher verursachter zusätzlicher Drehmomentverlust an der Eingangswelle bei minimaler elektrischer Leistung [Nm] |
Der Korrekturfaktor für die drehmomentabhängigen elektrischen Drehmomentverlustefel_corrund der Drehmomentverlust an der Eingangswelle des Getriebes, der durch die Leistungsaufnahme der elektrischen Getriebe-HilfseinrichtungTl,in,el verursacht wird, ist gemäß der Beschreibung in Absatz 3.1 zu berechnen.
3.2.1. Die Drehmomentverluste sind entsprechend dem nachfolgend beschriebenen Verfahren zu messen.
3.2.1.1. Allgemeine Anforderungen:
Siehe Angaben für Option 1 in Absatz 3.1.2.1.
3.2.1.2. Differenzmessungen:
Siehe Angaben für Option 1 in Absatz 3.1.2.2.
3.2.1.3. Einlaufen
Siehe Angaben für Option 1 in Absatz 3.1.2.3.
3.2.1.4. Vorkonditionierung
Siehe Angaben für Option 3 in Absatz 3.3.2.1.
3.2.1.5. Prüfbedingungen
3.2.1.5.1 Umgebungstemperatur
Siehe Angaben für Option 1 in Absatz 3.1.2.5.1.
3.2.1.5.2 Öltemperatur
Siehe Angaben für Option 1 in Absatz 3.1.2.5.2.
3.2.1.5.3 Ölqualität/Ölviskosität
Siehe Angaben für Option 1 in den Absätzen 3.1.2.5.3 und 3.1.2.5.4.
3.2.1.5.4 Ölstand und Ölkonditionierung
Siehe Angaben für Option 3 in Absatz 3.3.3.4.
3.2.2. Montage
Siehe Angaben für Option 1 in Absatz 3.1.3 für die Messung der drehmomentunabhängigen Verluste.
Siehe Angaben für Option 3 in Absatz 3.3.4 für die Messung der drehmomentabhängigen Verluste.
3.2.3. Messeinrichtungen
Siehe Angaben für Option 1 in Absatz 3.1.4 für die Messung der drehmomentunabhängigen Verluste.
Siehe Angaben für Option 3 in Absatz 3.3.5 für die Messung der drehmomentabhängigen Verluste.
3.2.4. Messsignale und Datenaufzeichnung
Siehe Angaben für Option 1 in Absatz 3.1.5 für die Messung der drehmomentunabhängigen Verluste.
Siehe Angaben für Option 3 in Absatz 3.3.7 für die Messung der drehmomentabhängigen Verluste.
3.2.5. Prüfverfahren
Die Abbildung der Drehmomentverluste, die für das Simulationsinstrument zur Anwendung kommt, enthält die Drehmomentverlustwerte eines Getriebes in Abhängigkeit von der Eingangsdrehzahl und dem Eingangsdrehmoment.
Um die Abbildung der Drehmomentverluste eines Getriebes zu ermitteln, müssen die Eckdaten für die Abbildung der Drehmomentverluste gemäß diesem Abschnitt gemessen und berechnet werden. Die Ergebnisse für die Drehmomentverluste müssen gemäß Nummer 3.4 ergänzt und gemäß Anlage 12 formatiert werden, um die weitere Verarbeitung durch das Simulationsinstrument zu ermöglichen.
3.2.5.1. Die drehmomentunabhängigen Verluste müssen nach dem in Absatz 3.1.1 für die drehmomentunabhängigen Verluste für Option 1 beschriebenen Verfahren nur für diejenige Einstellung der elektrischen und hydraulischen Verbraucher ermittelt werden, bei der ein geringer Verlust zu verzeichnen ist.
3.2.5.2. Für jeden Gang sind die drehmomentabhängigen Verluste nach dem in Absatz 3.3.6 für Option 3 beschriebenen Verfahren zu ermitteln, wobei für den betreffenden Drehmomentbereich folgende Abweichung gilt:
Drehmomentbereich:
Die Drehmomentverluste für jeden Gang sind bei 100 % des maximalen Eingangsdrehmoments des Getriebes pro Gang zu messen.
Für den Fall, dass das Ausgangsdrehmoment 10 kNm überschreitet (bei einem theoretischen verlustfreien Getriebe) oder die Eingangsleistung die angegebene maximale Eingangsleistung überschreitet, findet Absatz 3.4.4 Anwendung.
3.2.6. Validierung der Messwerte
Siehe Angaben für Option 3 in Absatz 3.3.8.
3.2.7. Messunsicherheit
Siehe Angaben für Option 1 in Absatz 3.1.8 für die Messung der drehmomentunabhängigen Verluste.
Siehe Angaben für Option 3 in Absatz 3.3.9 für die Messung der drehmomentabhängigen Verluste.
3.3. Option 3: Messung des gesamten Drehmomentverlusts
Bei Option 3 wird der Drehmomentverlust durch vollständige Messung der drehmomentabhängigen Verluste ermittelt, einschließlich der drehmomentunabhängigen Verluste des Getriebes.
3.3.1. Allgemeine Anforderungen
Siehe Angaben für Option 1 in Absatz 3.1.2.1.
3.3.1.1. Differenzmessungen:
Siehe Angaben für Option 1 in Absatz 3.1.2.2.
3.3.2. Einlaufen
Siehe Angaben für Option 1 in Absatz 3.1.2.3.
3.3.2.1. Vorkonditionierung
Siehe Angaben für Option 1 in Absatz 3.1.2.4, wobei folgende Ausnahme gilt:
Die Vorkonditionierung ist am direkten Gang durchzuführen, und zwar unter der Voraussetzung, dass an der Ausgangswelle kein Drehmoment anliegt oder als Zieldrehmoment für die Ausgangswelle null festgelegt wird. Verfügt das Getriebe über keinen direkten Gang, ist der Gang zu verwenden, dessen Verhältnis einem Verhältnis von 1:1 am nächsten kommt.
Oder
es gelten die Anforderungen gemäß Absatz 3.1.2.4 - mit folgender Ausnahme:
Die Vorkonditionierung ist am direkten Gang durchzuführen, und zwar unter der Voraussetzung, dass an der Ausgangswelle kein Drehmoment anliegt oder das Drehmoment an der Ausgangswelle bei +/- 50 Nm liegt. Verfügt das Getriebe über keinen direkten Gang, ist der Gang zu verwenden, dessen Verhältnis einem Verhältnis von 1:1 am nächsten kommt.
oder, falls beim Prüfstand eine (Haupt-Reibungs-)Kupplung an der Eingangswelle vorhanden ist:
Es gelten die Anforderungen gemäß Absatz 3.1.2.4 - mit folgender Ausnahme:
Die Vorkonditionierung ist am direkten Gang durchzuführen, ohne dass an der Ausgangswelle oder an der Eingangswelle ein Drehmoment anliegt. Verfügt das Getriebe über keinen direkten Gang, ist der Gang zu verwenden, dessen Verhältnis einem Verhältnis von 1:1 am nächsten kommt.
Das Getriebe würde dann von der Ausgangsseite angetrieben werden. Diese Vorschläge können auch in Kombination übernommen werden.
3.3.3. Prüfbedingungen
3.3.3.1. Umgebungstemperatur
Siehe Angaben für Option 1 in Absatz 3.1.2.5.1.
3.3.3.2. Öltemperatur
Siehe Angaben für Option 1 in Absatz 3.1.2.5.2.
3.3.3.3. Ölqualität/Ölviskosität
Siehe Angaben für Option 1 in den Absätzen 3.1.2.5.3 und 3.1.2.5.4.
3.3.3.4. Ölstand und Ölkonditionierung
Es gelten die Anforderungen gemäß den Angaben in Absatz 3.1.2.5.5 - mit folgenden Abweichungen:
Der Prüfpunkt für das externe Ölkonditionierungssystem ist wie folgt festgelegt:
3.3.4. Montage
Für den Prüfstand sind als Antrieb elektrische Maschinen (Eingang und Ausgang) einzusetzen.
Drehmomentsensoren müssen an der Eingangs- und Ausgangsseite des Getriebes montiert sein.
Als sonstige Anforderungen gelten die Angaben gemäß Absatz 3.1.3.
3.3.5. Messeinrichtungen
Für die Messung der drehmomentunabhängigen Verluste gelten die Anforderungen an Messeinrichtungen gemäß den Angaben für Option 1 in Absatz 3.1.4.
Für die Messung der drehmomentabhängigen Verluste gelten folgende Anforderungen:
Die Messunsicherheit der Drehmomentsensoren muss unter 5 % des gemessenen Drehmomentverlusts oder 1 Nm liegen (es gilt der jeweils größere Wert).
Der Einsatz von Drehmomentsensoren mit höheren Messunsicherheiten ist dann zulässig, wenn sich die Teile der Unsicherheit, die 5 % oder 1 Nm überschreiten, errechnen lassen und der kleinere dieser Teile zum gemessenen Drehmomentverlust hinzugerechnet wird.
Die Messunsicherheit für das Drehmoment ist gemäß der Beschreibung in Absatz 3.3.9 zu errechnen und einzubeziehen.
Als sonstige Anforderungen an die Messeinrichtungen gelten die Angaben für Option 1 in Absatz 3.1.4.
3.3.6. Prüfverfahren
3.3.6.1. Kompensation Nulldrehmomentsignal:
Siehe Angaben in Absatz 3.1.6.1.
3.3.6.2. Drehzahlbereich
Der Drehmomentverlust ist für folgende Drehzahlstufen zu messen (Drehzahl der Eingangswelle): 600, 900, 1.200, 1.600, 2.000, 2.500, 3.000 [...] U/min bis zur höchsten Drehzahl pro Gang gemäß Getriebespezifikationen oder bis zur letzten Drehzahlstufe vor der festgelegten maximalen Drehzahl.
Die Drehzahlübergangsphase (Zeit für den Wechsel zwischen zwei Drehzahlstufen) darf höchstens 20 Sekunden dauern.
3.3.6.3. Drehmomentbereich
Für jede Drehzahlstufe ist der Drehmomentverlust für folgende Eingangsdrehmomente zu messen: 0 (frei rotierende Ausgangswelle), 200, 400, 600, 900, 1.200, 1.600, 2.000, 2.500, 3.000, 3.500, 4.000 [...] Nm bis zum höchsten Eingangsdrehmoment pro Gang gemäß Getriebespezifikationen oder bis zur letzten Drehmomentstufe vor dem festgelegten maximalen Drehmoment und/oder zur letzten Drehmomentstufe vor dem Ausgangsdrehmoment von 10 kNm.
Für den Fall, dass das Ausgangsdrehmoment 10 kNm überschreitet (bei einem theoretischen verlustfreien Getriebe) oder die Eingangsleistung die angegebene maximale Eingangsleistung überschreitet, findet Absatz 3.4.4 Anwendung.
Die Drehmomentübergangsphase (Zeit für den Wechsel zwischen zwei Drehmomentstufen) darf höchstens 15 Sekunden (bei Option 2: höchstens 180 Sekunden) dauern.
Zur Erfassung des gesamten Drehmomentbereichs eines Getriebes in der vorstehenden Abbildung können an der Eingangs-/Ausgangsseite verschiedene Drehmomentsensoren mit begrenzten Messbereichen eingesetzt werden. Dazu kann die Messung in mehrere Abschnitte unterteilt werden, bei denen derselbe Satz von Drehmomentsensoren zum Einsatz kommt. Die gesamte Abbildung der Drehmomentverluste muss sich aus diesen Messabschnitten zusammensetzen.
3.3.6.4. Messsequenz
3.3.6.4.1 Die Messungen sind so durchzuführen, dass mit der niedrigsten Drehzahl begonnen und mit der höchsten Drehzahl geendet wird.
3.3.6.4.2 Das Eingangsdrehmoment muss entsprechend den vorstehenden Drehmomentstufen geändert werden, angefangen vom niedrigsten bis zum höchsten Drehmoment, das für jede Drehzahlstufe vom Sensor für das momentane Drehmoment erfasst wird.
3.3.6.4.3 Bei jeder Drehzahl- und Drehmomentstufe sind mindestens 5 Sekunden zur Stabilisierung innerhalb der in Absatz 3.3.3 festgelegten Temperaturgrenzwerte notwendig. Erforderlichenfalls kann die Stabilisierungszeit durch den Hersteller auf maximal 60 Sekunden (bei Option 2: maximal 180 Sekunden) verlängert werden. Während der Stabilisierung sind die Öl- und Umgebungstemperatur aufzuzeichnen.
3.3.6.4.4 Die Messserie ist insgesamt zweimal durchzuführen. Dafür ist es zulässig, mit demselben Satz von Drehmomentsensoren eine sequentielle Wiederholung von Abschnitten vorzunehmen.
3.3.7. Messsignale und Datenaufzeichnung
Mindestens folgende Signale müssen während der Messung aufgezeichnet werden:
Ist das Getriebe mit einem Gangschaltungs- und/oder Kupplungssystem mit hydraulischer Druckregelung oder aber mit einem mechanisch angetriebenen intelligenten Schmiersystem ausgestattet, ist zusätzlich Folgendes aufzuzeichnen:
Ist das Getriebe mit einer elektrischen Getriebe-Hilfseinrichtung ausgestattet, ist zusätzlich Folgendes aufzuzeichnen:
Bei Differenzmessungen zum Ausgleich von durch den Prüfstandsaufbau bedingten Einflussgrößen ist zusätzlich Folgendes aufzuzeichnen:
Die Abtast- und Aufzeichnungsrate muss mindestens 100 Hz betragen.
Zur Vermeidung von Messfehlern ist ein Tiefpassfilter zu verwenden.
3.3.8. Validierung der Messwerte19
3.3.8.1. Für jede der beiden Messungen ist das arithmetische Mittel von Drehmoment, Drehzahl, ggf. Spannung und Stromstärke für die 5 bis 15 Sekunden langen Messungen zu berechnen.
3.3.8.2. Das gemessene und gemittelte Drehmoment an der Eingangswelle muss für jeden gemessenen Betriebspunkt in der gesamten Drehmomentverlustserie weniger als ± 5 Nm bzw. ± 0,5 % des Drehmomenteinstellpunkts betragen, wobei der jeweils größere Wert maßgeblich ist.
3.3.8.3. Die mechanischen Drehmomentverluste und (gegebenenfalls) die elektrische Leistungsaufnahme sind für jede der Messungen wie folgt zu berechnen:
Tloss = Tin - (Tout / igear)
Pel = I * U
Es ist zulässig, durch den Prüfstandsaufbau bedingte Einflussgrößen von den Drehmomentverlusten abzuziehen (Absatz 3.3.2.2).
3.3.8.4. Die mechanischen Drehmomentverluste und (gegebenenfalls) die elektrische Leistungsaufnahme aus beiden Messserien sind zu mitteln (arithmetisches Mittel).
3.3.8.5. Die Abweichung zwischen den gemittelten Werten für die Drehmomentverluste der beiden Messserien muss unter ± 5 % des gemittelten Werts bzw. ± 1 Nm liegen (es gilt der jeweils größere Wert). Es ist das arithmetische Mittel der beiden gemittelten Werte für die Drehmomentverluste zu verwenden. Liegt eine größere Abweichung vor, ist der größte gemittelte Drehmomentverlust zu verwenden; alternativ kann die Prüfung für das Getriebe wiederholt werden.
3.3.8.6. Die Abweichung zwischen den gemittelten Werten für die elektrische Leistungsaufnahme (Spannung*Stromstärke) bei beiden Messserien muss unter ± 10 % des gemittelten Werts bzw. ± 5 W liegen, wobei der jeweils größere Wert maßgeblich ist. Dann ist das arithmetische Mittel der beiden gemittelten Leistungswerte zu verwenden.
3.3.8.7. Liegt eine größere Abweichung vor, sind diejenigen gemittelten Werte für die Spannung/Stromstärke zu verwenden, die der größten gemittelten Leistungsaufnahme entsprechen; alternativ kann die Prüfung für den Gang wiederholt werden.
3.3.9. Messunsicherheit
Der Teil der berechneten GesamtunsicherheitUT,loss, der 5 % vonTloss bzw. 1 Nm (ΔUT,loss) überschreitet, wobei der jeweils kleinere Wert vonΔUT,loss maßgeblich ist, ist zuTloss des gemeldeten DrehmomentverlustsTloss,rep hinzuzurechnen. WennUT,loss kleiner als 5 % vonTloss bzw. 1 Nm, dannTloss,rep =Tloss.
Tloss,rep = Tloss + MAX (0, ΔUT,loss)
ΔUT,loss = MIN ((UT,loss - 5 % * Tloss), (UT,loss - 1 Nm))
Für jede Messserie ist die GesamtunsicherheitUT,loss des Drehmomentverlusts anhand folgender Parameter zu berechnen:
Die Gesamtunsicherheit des Drehmomentverlusts (UT,loss) basiert auf den Unsicherheiten der Sensoren bei einem Vertrauensbereich von 95 %. Zur Berechnung wird die Quadratwurzel aus der Summe von Quadraten gezogen ("Gaußsches Fehlerfortpflanzungsgesetz").

dabei gilt:
| Tloss | = | Gemessener Drehmomentverlust (unkorrigiert) [Nm] |
| Tloss,rep | = | Gemeldeter Drehmomentverlust (nach Korrektur der Unsicherheit) [Nm] |
| UT,loss | = | Gesamte erweiterte Unsicherheit bei der Messung des Drehmomentverlusts bei einem Vertrauensbereich von 95 % [Nm] |
| uT,in/out | = | Messunsicherheit für die Eingangs-/Ausgangsdrehmomentverluste, getrennt nach Eingangs- und Ausgangsdrehmomentsensor [Nm] |
| igear | = | Gangübersetzung [-] |
| uTKC | = | Durch den Temperatureinfluss bedingte Unsicherheit am Signal für das momentane Drehmoment [Nm] |
| wtkc | = | Temperatureinfluss am Signal für das momentane Drehmoment pro Krefgemäß Angaben des Sensorherstellers [%] |
| uTK0 | = | Durch den Temperatureinfluss bedingte Unsicherheit am Nulldrehmomentsignal (bezogen auf das Nenndrehmoment) [Nm] |
| wtk0 | = | Temperatureinfluss am Nulldrehmomentsignal pro Kref(bezogen auf das Nenndrehmoment) gemäß Angaben des Sensorherstellers [%] |
| Kref | = | Bezugstemperaturbereich für uTKC und uTK0, wtk0und wtkc gemäß Angaben des Sensorherstellers [K] |
| ΔK | = | Zwischen Kalibrierung und Messung vorliegende Differenz der Sensortemperatur [K]. Sollte die Sensortemperatur nicht gemessen werden können, muss der Standardwert von ΔK = 15 K verwendet werden. |
| Tc | = | Momentaner/gemessener Drehmomentwert am Drehmomentsensor [Nm] |
| Tn | = | Nenndrehmomentwert des Drehmomentsensors [Nm] |
| ucal | = | Durch die Kalibrierung des Drehmomentsensors bedingte Unsicherheit [Nm] |
| Wcal | = | Relative Kalibrierunsicherheit (bezogen auf das Nenndrehmoment) [%] |
| kcal | = | Kalibrierungsfortschrittsfaktor (sofern vom Sensorhersteller angegeben, andernfalls = 1) |
| upara | = | Durch parasitäre Lasten bedingte Unsicherheit [Nm] |
| wpara | = | senspara * ipara
Relativer Einfluss von Kräften und Biegemomenten, die durch Versatz verursacht werden [%] |
| senspara | = | Maximaler Einfluss parasitärer Lasten auf den jeweiligen Drehmomentsensor gemäß Angaben des Sensorherstellers [%]; wurde kein spezifischer Wert für parasitäre Lasten vom Sensorhersteller angegeben, wird als Wert 1,0 % festgelegt |
| ipara | = | Maximaler Einfluss parasitärer Lasten auf den jeweiligen Drehmomentsensor in Abhängigkeit von der Prüfanordnung (A/B/C gemäß nachstehender Festlegung). |
| = | A) 10 % für den Fall, dass Lager die parasitären Lasten vor und hinter dem Sensor isolieren und dass am Sensor eine elastische Kupplung (oder Kardanwelle) funktional montiert ist (vor- oder nachgelagert); darüber hinaus können diese Lager in einer Antriebs-/Bremsmaschine (z.B. einer elektrischen Maschine) und/oder im Getriebe integriert sein, sofern die Kräfte in der Maschine und/oder im Getriebe vom Sensor ferngehalten werden. Siehe Abbildung 3.
Abbildung 3 Prüfanordnung a für Option 3 |
|
| = | B) 50 % für den Fall, dass Lager die parasitären Lasten vor und hinter dem Sensor isolieren und dass am Sensor keine elastische Kupplung funktional montiert ist; darüber hinaus können diese Lager in einer Antriebs-/Bremsmaschine (z.B. einer elektrischen Maschine) und/oder im Getriebe integriert sein, sofern die Kräfte in der Maschine und/oder im Getriebe vom Sensor ferngehalten werden. Siehe Abbildung 4.
Abbildung 4 Prüfanordnung B für Option 3 |
|
| = | C) 100 % für alle anderen Prüfaufbauten |
3.4. Ergänzung zu den Eingabedateien für das Simulationsinstrument
Für jeden Gang ist eine Abbildung der Drehmomentverluste zu ermitteln, in der die festgelegten Eingangsdrehzahl- und Eingangsdrehmomentstufen enthalten sind, und zwar mit einer der angegebenen Prüfoptionen oder den Pauschalwerten für den Drehmomentverlust. Hinsichtlich der Eingabedatei für das Simulationsinstrument muss diese Grundabbildung der Drehmomentverluste gemäß folgender Beschreibung ergänzt werden:
3.4.1. In den Fällen, in denen es sich bei der höchsten geprüften Eingangsdrehzahl um die letzte Drehzahlstufe unterhalb des festgelegten zulässigen Höchstwerts für die Getriebedrehzahl handelt, ist eine Extrapolation des Drehmomentverlusts bis zur höchsten Drehzahl mit linearer Regression anhand der beiden letzten gemessenen Drehzahlstufen vorzunehmen.
3.4.2. In den Fällen, in denen es sich bei dem höchsten geprüften Eingangsdrehmoment um die letzte Drehmomentstufe unterhalb des festgelegten zulässigen Höchstwerts für das Getriebedrehmoment handelt, ist eine Extrapolation des Drehmomentverlusts bis zum höchsten Drehmoment mit linearer Regression anhand der beiden letzten gemessenen Drehmomentstufen für die zugehörige Drehzahlstufe vorzunehmen. Um Toleranzen des Motordrehmoments usw. zu berücksichtigen, nimmt das Simulationsinstrument erforderlichenfalls eine Extrapolation des Drehmomentverlusts für Eingangsdrehmomentwerte vor, die bis zu 10 % über dem festgelegten zulässigen Höchstwert für das Getriebedrehmoment liegen.
3.4.3. Für den Fall, dass eine Extrapolation der Drehmomentverlustwerte gleichzeitig sowohl für den Höchstwert der Eingangsdrehzahl als auch für den Höchstwert des Eingangsdrehmoments vorgenommen wird, ist der Drehmomentverlust für den gemeinsamen Punkt von höchster Drehzahl und höchstem Drehmoment anhand einer zweidimensionalen linearen Extrapolation zu berechnen.
3.4.4. Sollte das höchste Ausgangsdrehmoment 10 kNm überschreiten (bei einem theoretischen verlustfreien Getriebe) und/oder bei allen Drehzahl- und Drehmomentpunkten, bei denen die Eingangsleistung höher ist als die angegebene maximale Eingangsleistung, ist es dem Hersteller gestattet, die Drehmomentverlustwerte für alle Drehmomente über 10 kNm und/oder für alle Drehzahl- und Drehmomentpunkte mit einer höheren Eingangsleistung als der angegebenen maximalen Eingangsleistung zu verwenden, und zwar jeweils von einer der folgenden Möglichkeiten:
Für die Fälle i und ii in Option 2 sind die Drehmomentverluste bei Last an demjenigen Eingangsdrehmoment zu messen, das einem Ausgangsdrehmoment von 10 kNm und/oder der angegebenen maximalen Eingangsleistung entspricht.
3.4.5. Für Drehzahlen unter der festgelegten Mindestdrehzahl und für die zusätzliche Eingangsdrehzahlstufe von 0 U/min sind die für die kleinste Drehzahlstufe ermittelten gemeldeten Drehmomentverluste zu übernehmen.
3.4.6. Zur Erfassung des Bereichs mit den negativen Eingangsdrehmomentwerten beim Ausrollen sind für diese negativen Werte die Drehmomentverlustwerte für die entsprechenden positiven Eingangsdrehmomentwerte zu übernehmen.
3.4.7. Mit Zustimmung einer Genehmigungsbehörde können die Drehmomentverluste für die Eingangsdrehzahlen unter 1.000 U/min durch die Drehmomentverluste bei 1.000 U/min ersetzt werden, wenn die Messung aus technischen Gründen nicht möglich ist.
3.4.8. Ist die Messung von Drehzahlpunkten aus technischen Gründen nicht möglich (z.B. aufgrund der Eigenfrequenz), ist es dem Hersteller gestattet, die Drehmomentverluste mit Zustimmung der Genehmigungsbehörde durch Interpolation oder Extrapolation zu berechnen (diese Möglichkeit ist auf max. 1 Drehzahlstufe pro Gang begrenzt).
3.4.9. Die Daten für die Abbildung der Drehmomentverluste sind gemäß den Angaben in Anlage 12 dieses Anhangs zu formatieren und zu speichern.
4. Drehmomentwandler
Als Kenndaten des Drehmomentwandlers müssen für die Eingabe in das Simulationsinstrument folgende Werte bestimmt werden:Tpum 1000 (Bezugsdrehmoment bei einer Eingangsdrehzahl von 1.000 U/min) undµ (Drehmomentverhältnis des Drehmomentwandlers). Beide Werte hängen vom Übersetzungsverhältnis ν (= Drehzahl am Ausgang (Turbinenrad)/Drehzahl am Eingang (Pumpenrad) für den Drehmomentwandler) des Drehmomentwandlers ab.
Zur Bestimmung der Kenndaten des Wandlers muss der Antragsteller für die Zertifizierung - unabhängig von der gewählten Option für die Beurteilung der Drehmomentverluste des Getriebes - folgendes Verfahren anwenden.
Zur Berücksichtigung der beiden möglichen Anordnungen des Wandlers und der mechanischen Getriebeteile wird wie folgt zwischen Fall S und Fall P unterschieden:
Fall S: Wandler und mechanische Getriebeteile in serieller Anordnung
Fall P: Wandler und mechanische Getriebeteile in paralleler Anordnung (Anlage mit Leistungsteilung)
Bei Anordnungen gemäß Fall S können die Kenndaten des Wandlers entweder gesondert vom mechanischen Getriebe oder zusammen mit diesem bewertet werden. Bei Anordnungen gemäß Fall P ist die Bewertung der Kenndaten des Wandlers nur zusammen mit dem mechanischen Getriebe möglich. In diesem Fall sowie bei den zu messenden hydromechanischen Getrieben gilt die gesamte Anordnung, d. h. Drehmomentwandler und mechanisches Getriebe, als Wandler mit ähnlichen Kennlinien wie bei einem einzigen Drehmomentwandler.
Zur Bestimmung der Kenndaten des Drehmomentwandlers können zwei Messoptionen verwendet werden:
Bei Anordnungen gemäß Fällen S und P kann der Hersteller zwischen Option A und B wählen.
Im Hinblick auf die Eingabe in das Simulationsinstrument sind das Drehmomentverhältnis µ und das BezugsdrehmomentTpum des Drehmomentwandlers für einen Bereich von v ≤ 0,95 (= Fahrzeug im Fahrbetrieb) zu messen. Der Bereich von ν ≥ 1,00 (= ausrollendes Fahrzeug) kann entweder gemessen oder den Pauschalwerten aus Tabelle 1 entnommen werden.
Bei Messungen, die zusammen mit einem mechanischen Getriebe erfolgen, kann der Freilaufpunkt von ν = 1,00 abweichen, so dass der Bereich der gemessenen Übersetzungsverhältnisse entsprechend angepasst werden muss.
Bei Verwendung von Pauschalwerten dürfen die Daten, die als Kenndaten des Drehmomentwandlers in das Simulationsinstrument eingegeben werden, nur für den Bereich von ν ≤ 0,95 (oder das angepasste Übersetzungsverhältnis) gelten. Das Simulationsinstrument fügt automatisch die Pauschalwerte für Freilaufbedingungen hinzu.
Tabelle 1 Pauschalwerte für v > 1,00
| ν | µ | Tpum 1000 |
| 1,000 | 1,0000 | 0,00 |
| 1,100 | 0,9999 | - 40,34 |
| 1,222 | 0,9998 | - 80,34 |
| 1,375 | 0,9997 | - 136,11 |
| 1,571 | 0,9996 | - 216,52 |
| 1,833 | 0,9995 | - 335,19 |
| 2,200 | 0,9994 | - 528,77 |
| 2,500 | 0,9993 | - 721,00 |
| 3,000 | 0,9992 | - 1.122,00 |
| 3,500 | 0,9991 | - 1.648,00 |
| 4,000 | 0,9990 | - 2.326,00 |
| 4,500 | 0,9989 | - 3.182,00 |
| 5,000 | 0,9988 | - 4.242,00 |
4.1. Option A: Gemessene Kenndaten des Drehmomentwandlers bei konstanter Drehzahl
4.1.1. Allgemeine Anforderungen
Der für die Messungen verwendete Drehmomentwandler muss den Zeichnungsvorgaben für Seriendrehmomentwandler entsprechen.
Änderungen am Wandler sind zulässig, wenn sie mit dem Ziel vorgenommen werden, dass die in diesem Anhang genannten Prüfvorschriften erfüllt werden, z.B. zur Anbringung von Messsensoren.
Auf Verlangen der Genehmigungsbehörde muss der Antragsteller für die Zertifizierung erklären und nachweisen, dass er die in diesem Anhang aufgeführten Anforderungen erfüllt.
4.1.2. Öltemperatur
Die Öltemperatur am Eingang des Wandlers muss folgende Anforderungen erfüllen:
Die Öltemperatur für Messungen am Wandler, die unabhängig vom Getriebe erfolgen, muss 90 °C +7/- 3 K betragen.
Die Öltemperatur für Messungen am Wandler, die zusammen mit dem Getriebe erfolgen (Fälle S und P), muss 90 °C +20/- 3 K betragen.
Die Öltemperatur muss am Ablassstopfen oder im Ölsumpf gemessen werden.
Für den Fall, dass die Kenndaten des Wandlers gesondert vom Getriebe gemessen werden, muss die Messung der Öltemperatur vor dem Prüfstand/der Prüftrommel für den Wandler erfolgen.
4.1.3. Öldurchsatz und Öldruck
Der Öldurchsatz am Wandlereingang und der Öldruck am Wandlerausgang sind in den für den Betrieb des Drehmomentwandlers angegebenen Grenzwerten zu halten, die von der zugehörigen Getriebeart und der geprüften maximalen Eingangsdrehzahl abhängig sind.
4.1.4. Ölqualität/Ölviskosität
Siehe Angaben für die Getriebeprüfung in den Absätzen 3.1.2.5.3 und 3.1.2.5.4.
4.1.5. Montage
Der Drehmomentwandler ist mit einem Drehmoment- und einem Drehzahlsensor sowie einer elektrischen Maschine an seiner Eingangs- und Ausgangswelle auf einen Prüfstand zu montieren.
4.1.6. Messeinrichtungen
Die Anlagen des Kalibrierlabors müssen die Anforderungen von ISO/TS 16949, den ISO 9000 Reihen oder von ISO/IEC 17025 erfüllen. Sämtliche Laboreinrichtungen für Referenzmessungen, die zur Kalibrierung und/oder Überprüfung verwendet werden, müssen auf nationale (internationale) Normen zurückführbar sein.
4.1.6.1. Drehmoment
Die Messunsicherheit der Drehmomentsensoren muss unter 1 % des gemessenen Drehmoments liegen.
Der Einsatz von Drehmomentsensoren mit höheren Messunsicherheiten ist dann zulässig, wenn sich der Teil der Unsicherheit, der 1 % des gemessenen Drehmoments überschreitet, errechnen lässt und zum gemessenen Drehmomentverlust gemäß Absatz 4.1.7 hinzugerechnet wird.
4.1.6.2. Drehzahl
Die Unsicherheit der Drehzahlsensoren darf höchstens ± 1 U/min betragen.
4.1.6.3. Temperatur
Die Unsicherheit der für die Messung der Umgebungstemperatur eingesetzten Temperatursensoren darf höchstens ± 1,5 K betragen.
Die Unsicherheit der für die Messung der Öltemperatur eingesetzten Temperatursensoren darf höchstens ± 1,5 K betragen.
4.1.7. Prüfverfahren
4.1.7.1. Kompensation Nulldrehmomentsignal
Siehe Angaben in Absatz 3.1.6.1.
4.1.7.2. Messsequenz
4.1.7.2.1 Die Eingangsdrehzahlnpum des Wandlers ist auf eine konstante Drehzahl zu bringen, die innerhalb des folgenden Bereichs liegt:
1.000 U/min ≤ npum ≤ 2.000 U/min
4.1.7.2.2 Das Übersetzungsverhältnis v ist so anzupassen, dass die Ausgangsdrehzahlntur von 0 U/min bis zum festgelegten Wertnpum erhöht wird.
4.1.7.2.3 Für den Bereich des Übersetzungsverhältnisses, der zwischen 0 und 0,6 liegt, ist als Schrittweite 0,1 zu verwenden, für den Bereich zwischen 0,6 und 0,95 hingegen 0,05.
4.1.7.2.4 Als Obergrenze für das Übersetzungsverhältnis kann vom Hersteller ein Wert unter 0,95 festgelegt werden. In diesem Fall sind mindestens sieben gleichmäßig verteilte Punkte zwischenv = 0 und einem Wert von ν < 0,95 im Rahmen der Messung zu erfassen.
4.1.7.2.5 Bei jedem Schritt sind mindestens 3 Sekunden zur Stabilisierung innerhalb der in Absatz 4.1.2 festgelegten Temperaturgrenzwerte notwendig. Erforderlichenfalls kann die Stabilisierungszeit durch den Hersteller auf maximal 60 Sekunden verlängert werden. Während der Stabilisierung ist die Öltemperatur aufzuzeichnen.
4.1.7.2.6 Bei jedem Schritt sind die in Absatz 4.1.8 angegebenen Signale 3 bis 15 Sekunden lang für den Prüfpunkt aufzuzeichnen.
4.1.7.2.7 Die Messsequenz (Absätze 4.1.7.2.1 bis 4.1.7.2.6) muss insgesamt zweimal durchgeführt werden.
4.1.8. Messsignale und Datenaufzeichnung
Während der Messung sind mindestens folgende Signale aufzuzeichnen:
Die Abtast- und Aufzeichnungsrate muss mindestens 100 Hz betragen.
Zur Vermeidung von Messfehlern ist ein Tiefpassfilter zu verwenden.
4.1.9. Validierung der Messwerte
4.1.9.1. Für jede der beiden Messungen ist das arithmetische Mittel von Drehmoment und Drehzahl für die 3 bis 15 Sekunden langen Messungen zu berechnen.
4.1.9.2. Die in beiden Messserien gemessenen Werte für das Drehmoment und die Drehzahl sind zu mitteln (arithmetisches Mittel).
4.1.9.3. Die Abweichung zwischen den gemittelten Drehmomentwerten beider Messserien muss unter ± 5 % des gemittelten Werts bzw. ± 1 Nm liegen (es gilt der jeweils größere Wert). Es muss das arithmetische Mittel der beiden gemittelten Drehmomentwerte verwendet werden. Liegt eine größere Abweichung vor, ist für die Absätze 4.1.10. und 4.1.11. folgender Wert zu verwenden; alternativ kann die Prüfung für den Wandler wiederholt werden.
4.1.9.4. Die gemessenen und gemittelten Werte für die Drehzahl und das Drehmoment an der Eingangswelle müssen für jeden gemessenen Betriebspunkt in der gesamten Übersetzungsverhältnisserie weniger als ± 5 U/min und ± 5 Nm des Einstellpunkts für Drehzahl und Drehmoment betragen.
4.1.10. Messunsicherheit
Der Teil der errechneten MessunsicherheitUT,pum/tur, der 1 % des gemessenen DrehmomentsTc,pum/tur überschreitet, ist für die Korrektur des Kennwerts für den Wandler gemäß folgender Festlegung zu verwenden.
ΔUT,pum/tur = MAX (0, (UT,pum/tur - 0,01 * Tc,pum/tur))
Die MessunsicherheitUT,pum/tur für das Drehmoment ist anhand des folgenden Parameters zu berechnen:
Die Messunsicherheit (UT,pum/tur) für das Drehmoment basiert auf den Unsicherheiten der Sensoren bei einem Vertrauensbereich von 95 %.
UT,pum/tur = 2 * ucal
ucal = 1 × (Wcal / kcal) × Tn
dabei gilt:
| Tc,pum/tur | = | Momentaner/gemessener Drehmomentwert am Eingangs-/Ausgangsdrehmomentsensor [Nm] |
| Tpum | = | Drehmoment am Eingang (Pumpenrad) (nach Korrektur der Unsicherheit) [Nm] |
| UT,pum/tur | = | Messunsicherheit für das Eingangs-/Ausgangsdrehmoment bei einem Vertrauensbereich von 95 %, getrennt nach Eingangs- und Ausgangsdrehmomentsensor [Nm] |
| Tn | = | Nenndrehmomentwert des Drehmomentsensors [Nm] |
| ucal | = | Durch die Kalibrierung des Drehmomentsensors bedingte Unsicherheit [Nm] |
| Wcal | = | Relative Kalibrierunsicherheit (bezogen auf das Nenndrehmoment) [%] |
| kcal | = | Kalibrierungsfortschrittsfaktor (sofern vom Sensorhersteller angegeben, andernfalls = 1) |
4.1.11. Berechnung der Kenndaten des Wandlers
Für jeden Messpunkt sind die Messdaten folgenden Berechnungen zu unterziehen:
Das Drehmomentverhältnis des Wandlers errechnet sich aus:
µ =(Tc,tur - ΔUT,tur) / Tc,pum + ΔUT,pum)
Das Übersetzungsverhältnis des Wandlers errechnet sich aus:
ν = ntur / npum
Das Bezugsdrehmoment bei 1.000 U/min errechnet sich aus:

dabei gilt:
| µ | = | Drehmomentverhältnis des Wandlers [-] |
| v | = | Übersetzungsverhältnis des Wandlers [-] |
| Tc, pum | = | Drehmoment am Eingang (Pumpenrad) (korrigiert) [Nm] |
| npum | = | Drehzahl am Eingang (Pumpenrad) [U/min] |
| ntur | = | Drehzahl am Ausgang (Turbinenrad) [U/min] |
| Tpum1000 | = | Bezugsdrehmoment bei 1.000 U/min [Nm] |
4.2. Option B: Messung bei konstantem Eingangsdrehmoment (gemäß SAE J643)
4.2.1. Allgemeine Anforderungen
Siehe Angaben in Absatz 4.1.1.
4.2.2. Öltemperatur
Siehe Angaben in Absatz 4.1.2.
4.2.3. Öldurchsatz und Öldruck
Siehe Angaben in Absatz 4.1.3.
4.2.4. Ölqualität
Siehe Angaben in Absatz 4.1.4.
4.2.5. Montage
Siehe Angaben in Absatz 4.1.5.
4.2.6. Messeinrichtungen
Siehe Angaben in Absatz 4.1.6.
4.2.7. Prüfverfahren
4.2.7.1. Kompensation Nulldrehmomentsignal
Siehe Angaben in Absatz 3.1.6.1.
4.1.7.2. Messsequenz
4.2.7.2.1 Als EingangsdrehmomentTpum ist ein positiver Wert beinpum = 1.000 U/min einzustellen, wobei die Ausgangswelle des Wandlers nicht rotieren darf (Ausgangsdrehzahlntur = 0 U/min).
4.2.7.2.2 Das Übersetzungsverhältnisv ist so anzupassen, dass die Ausgangsdrehzahlntur von 0 U/min bis zu einem Wert vonntur erhöht und der nutzbare Bereich von ν mit mindestens sieben gleichmäßig verteilten Drehzahlpunkten erfasst wird.
4.2.7.2.3 Für den Bereich des Übersetzungsverhältnisses, der zwischen 0 und 0,6 liegt, ist als Schrittweite 0,1 zu verwenden, für den Bereich zwischen 0,6 und 0,95 hingegen 0,05.
4.2.7.2.4 Als Obergrenze für das Übersetzungsverhältnis kann vom Hersteller ein Wert unter 0,95 festgelegt werden.
4.2.7.2.5 Bei jedem Schritt sind mindestens 5 Sekunden zur Stabilisierung innerhalb der unter 4.2.2 festgelegten Temperaturgrenzwerte notwendig. Erforderlichenfalls kann die Stabilisierungszeit durch den Hersteller auf maximal 60 Sekunden verlängert werden. Während der Stabilisierung muss die Öltemperatur aufgezeichnet werden.
4.2.7.2.6 Bei jedem Schritt sind die unter 4.2.8 angegebenen Werte 5 bis 15 Sekunden lang für den Prüfpunkt aufzuzeichnen.
4.2.7.2.7 Die Messsequenz (Absätze 4.2.7.2.1 bis 4.2.7.2.6) ist insgesamt zweimal durchzuführen.
4.2.8. Messsignale und Datenaufzeichnung
Siehe Angaben in Absatz 4.1.8.
4.2.9. Validierung der Messwerte
Siehe Angaben in Absatz 4.1.9.
4.2.10. Messunsicherheit
Siehe Angaben in Absatz 4.1.9.
4.2.11. Berechnung der Kenndaten des Wandlers
Siehe Angaben in Absatz 4.1.11.
5. Sonstige Drehmoment übertragende Bauteile
Gegenstand dieses Abschnitts sind unter anderem Motorbremsen, Getriebebremsen, Antriebsstrangbremsen und Bauteile, die im Sinne des Simulationsinstruments als Dauerbremseinrichtungen gelten. Zu diesen Bauteilen zählen z.B. Anfahrelemente für Fahrzeuge wie einfache nasse Getriebeeingangskupplungen oder hydrodynamische Kupplungen.
5.1. Verfahren zur Ermittlung der Schleppverluste von Dauerbremseinrichtungen
Beim Schleppdrehmomentverlust einer Dauerbremseinrichtung handelt es sich um eine Funktion der Drehzahl des Bremsenrotors. Da für die Dauerbremseinrichtung verschiedene Einbauorte innerhalb des Antriebsstrangs des Fahrzeugs in Frage kommen, ist die Drehzahl des Bremsenrotors vom Antriebsteil (= Drehzahlreferenz) und vom Übersetzungsverhältnis zwischen dem Antriebsteil und dem Bremsenrotor abhängig - siehe Tabelle 2.
Tabelle 2 Drehzahlen des Bremsenrotors
| Anordnung | Drehzahlreferenz | Berechnung der Drehzahl des Bremsenrotors |
| A. Motorbremse | Motordrehzahl | nretarder = nengine * istep-up |
| B. Getriebeeingangsbremse | Drehzahl der Getriebeeingangswelle | nretarder = ntransm.input* istep-up = ntransm.output* itransm* istep-up |
| C. Getriebeausgangsbremse oder Kardanwellenbremse | Drehzahl der Getriebeausgangswelle | nretarder = ntransm.output * istep-up |
dabei gilt:
| istep-up | = | Übersetzungsverhältnis ins Schnelle = Drehzahl des Bremsenrotors/Drehzahl des Antriebsteils |
| itransm | = | Übersetzungsverhältnis = Getriebeeingangsdrehzahl/Getriebeausgangsdrehzahl |
Dauerbremseinrichtungen, die untrennbar in den Motor eingebaut sind, müssen zusammen mit dem Motor geprüft werden. Diese untrennbar in den Motor eingebauten Dauerbremseinrichtungen sind nicht Gegenstand dieses Abschnitts.
Für Dauerbremseinrichtungen, die vom Antriebsstrang oder Motor durch gleich welche Art von Kupplung getrennt werden können, gilt im getrennten Zustand eine Rotordrehzahl von null, wodurch sich keinerlei Leistungsverluste ergeben.
Die Messung der Schleppverluste der Bremseinrichtungen muss anhand eines der beiden folgenden Verfahren erfolgen:
5.1.1. Allgemeine Anforderungen
Falls die Verluste an der Dauerbremseinrichtung als Einzelkomponente gemessen werden, wirken sich die Drehmomentverluste in den Lagern der Prüfanordnung auf die Messergebnisse aus. Es ist zulässig, diese Lagerverluste zu messen und anschließend von den Messergebnissen für die Schleppverluste der Bremseinrichtungen abzuziehen.
Der Hersteller muss dafür sorgen, dass die für die Messungen verwendete Dauerbremseinrichtung den Zeichnungsvorgaben für Seriendauerbremseinrichtungen entspricht.
Änderungen an der Dauerbremseinrichtung sind zulässig, wenn sie mit dem Ziel vorgenommen werden, dass die in diesem Anhang genannten Prüfanforderungen erfüllt werden, z.B. zur Anbringung von Messsensoren oder zur Anpassung externer Ölkonditionierungssysteme.
Auf Grundlage der in Anlage 6 dieses Anhangs beschriebenen Familie können die bei Getrieben mit Dauerbremseinrichtung gemessenen Schleppverluste für das gleiche (bzw. ein ähnliches) Getriebe ohne Dauerbremseinrichtung verwendet werden.
Zur Messung von Drehmomentverlusten bei Varianten mit und ohne Dauerbremseinrichtung ist es zulässig, die gleiche Getriebeeinheit zu verwenden.
Auf Verlangen der Genehmigungsbehörde muss der Antragsteller für die Zertifizierung erklären und nachweisen, dass die in diesem Anhang aufgeführten Anforderungen erfüllt werden.
5.1.2. Einlaufen
Auf Ersuchen des Antragstellers kann die Dauerbremseinrichtung einem Einlaufverfahren unterzogen werden. Folgende Bestimmungen gelten für ein Einlaufverfahren:
5.1.2.1 Für den Fall, dass der Hersteller die Dauerbremseinrichtung einem Einlaufverfahren unterzieht, darf die Einlaufzeit für die Bremseinrichtung ohne aufgebrachtes Drehmoment höchstens 100 Stunden betragen. Optional kann das Einlaufverfahren anteilig - bis zu 6 Stunden - mit aufgebrachtem Drehmoment durchgeführt werden.
5.1.3. Prüfbedingungen
5.1.3.1. Umgebungstemperatur
Die bei der Prüfung herrschende Umgebungstemperatur muss in einem Bereich von 25 °C ± 10 K liegen.
Die Messung der Umgebungstemperatur muss 1 m seitlich neben der Dauerbremseinrichtung erfolgen.
5.1.3.2. Umgebungsdruck
Bei magnetischen Dauerbremseinrichtungen muss der Umgebungsdruck entsprechend der internationalen Standardatmosphäre (ISA) laut ISO 2533 mindestens 899 hPa betragen.
5.1.3.3. Öl- bzw. Wassertemperatur
Bei hydrodynamischen Dauerbremseinrichtungen:
Mit Ausnahme der Flüssigkeit ist keine externe Beheizung zulässig.
Für den Fall, dass die Prüfung als Einzelkomponente erfolgt, darf die Temperatur der Flüssigkeit (Öl oder Wasser) höchstens 87 °C betragen.
Erfolgt die Prüfung zusammen mit dem Getriebe, finden die für die Getriebeprüfung geltenden Grenzwerte für die Öltemperatur Anwendung.
5.1.3.4. Öl- bzw. Wasserqualität
Für die Prüfung muss neues, für den europäischen Markt empfohlenes Öl für die erste Befüllung verwendet werden.
Bei Dauerbremseinrichtungen auf Wasserbasis muss die Wasserqualität den Vorgaben genügen, die der Hersteller für die Bremseinrichtung festgelegt hat. Als Wasserdruck muss ein fester Wert eingestellt werden, der den Fahrzeugbedingungen nahekommt (relativer Druck von 1 ± 0,2 bar am Eingangsschlauch der Dauerbremseinrichtung).
5.1.3.5. Ölviskosität
Gibt es mehrere Empfehlungen für die erste Ölbefüllung, werden sie als gleichwertig behandelt, sofern sich ihre jeweilige kinematische Viskosität bei gleicher Temperatur um nicht mehr als 50 % voneinander unterscheidet (innerhalb des angegebenen Toleranzbereichs für KV100).
5.1.3.6. Öl- bzw. Wasserstand
Der Öl-/Wasserstand muss den für die Dauerbremseinrichtung geltenden Vorgaben genügen.
5.1.4. Montage
Die elektrische Maschine, der Drehmomentsensor und der Drehzahlsensor müssen an der Eingangsseite der Dauerbremseinrichtung bzw. des Getriebes montiert sein.
Beim der Anbringung muss für die Dauerbremseinrichtung (und das Getriebe) ein Neigungswinkel wie beim Einbau in das Fahrzeug gemäß Homologationszeichnung ± 1° bzw. von 0° ± 1° eingehalten werden.
5.1.5. Messeinrichtungen
Siehe Angaben für die Getriebeprüfung in Absatz 3.1.4.
5.1.6. Prüfverfahren19
5.1.6.1. Kompensation Nulldrehmomentsignal:
Siehe Angaben für die Getriebeprüfung in Absatz 3.1.6.1.
5.1.6.2. Messsequenz
Die Messsequenz für die Drehmomentverluste bei der Prüfung der Dauerbremseinrichtung muss den für die Getriebeprüfung geltenden Bestimmungen gemäß Absatz 3.1.6.3.2 bis 3.1.6.3.5 entsprechen.
5.1.6.2.1 Messung an der Dauerbremseinrichtung als Einzelkomponente
Wird die Dauerbremseinrichtung als Einzelkomponente geprüft, muss die Messung der Drehmomentverluste unter Verwendung folgender Drehzahlpunkte erfolgen:
200, 400, 600, 900, 1.200, 1.600, 2.000, 2.500, 3.000, 3.500, 4.000, 4.500, 5.000 und weiter bis zur maximalen Drehzahl des Bremsenrotors.
5.1.6.2.2 Messung zusammen mit dem Getriebe
5.1.6.2.2.1 Für den Fall, dass die Dauerbremseinrichtung zusammen mit einem Getriebe geprüft wird, muss der gewählte Getriebegang zulassen, dass die Dauerbremseinrichtung mit maximaler Rotordrehzahl betrieben wird.
5.1.6.2.2.2 Der Drehmomentverlust muss bei der Betriebsdrehzahl gemessen werden, die für die zugehörige Getriebeprüfung angegeben ist.
5.1.6.2.2.3 Auf Wunsch des Herstellers können bei Getriebeeingangsdrehzahlen von unter 600 U/min weitere Messpunkte hinzugefügt werden.
5.1.6.2.2.4 Der Hersteller hat die Möglichkeit, die Verluste der Dauerbremseinrichtung von den Verlusten des Getriebes insgesamt abzugrenzen, indem er die Prüfungen in der nachstehend beschriebenen Reihenfolge vornimmt:
=Tl,in,withret
=Tl,in,withoutret
=Tl,in,retsys= Tl,in,withret - Tl,in,withoutret
5.1.7. Messsignale und Datenaufzeichnung
Siehe Angaben für die Getriebeprüfung in Absatz 3.1.5.
5.1.8. Validierung der Messwerte
Alle aufgezeichneten Daten müssen derart geprüft und verarbeitet werden, wie es für die Getriebeprüfung unter Absatz 3.1.7 beschrieben ist.
5.2. Ergänzung zu den für das Simulationsinstrument zu verwendenden Eingabedateien
5.2.1. Als Drehmomentverlust der Dauerbremseinrichtung für Drehzahlen unter der niedrigsten Messdrehzahl muss der bei dieser niedrigsten Messdrehzahl gemessene Drehmomentverlust eingestellt werden.
5.2.2. Für den Fall, dass die Verluste der Dauerbremseinrichtung durch Berechnung der Differenzen zwischen den Datensätzen (Prüfung mit und ohne Dauerbremseinrichtung, siehe Absatz 5.1.6.2.2.4) von den Gesamtverlusten abgegrenzt wurden, sind die tatsächlichen Drehzahlen des Bremsenrotors vom Einbauort der Dauerbremseinrichtung und/oder von der gewählten Gangübersetzung sowie vom Übersetzungsverhältnis der Dauerbremseinrichtung abhängig und können demnach von den gemessenen Drehzahlen an der Eingangswelle des Getriebes abweichen. Das Verhältnis zwischen den tatsächlichen Drehzahlen des Bremsenrotors und den gemessenen Schleppverlustdaten muss gemäß der Beschreibung in Absatz 5.1 (Tabelle 2) berechnet werden.
5.2.3. Die Daten für die Abbildung der Drehmomentverluste müssen gemäß den Angaben in Anlage 12 dieses Anhangs formatiert und gespeichert werden.
6. Zusätzliche Bauteile des Antriebsstrangs/Winkelgetriebe
6.1. Verfahren zur Ermittlung der Winkelgetriebeverluste
Die Winkelgetriebeverluste müssen entsprechend einem der folgenden Fälle ermittelt werden:
6.1.1. Fall A: Messung an einem separaten Winkelgetriebe
Für die Messung der Drehmomentverluste bei einem separaten Winkelgetriebe stehen die drei Optionen zur Verfügung, die für die Ermittlung der Getriebeverluste gelten:
| Option 1: | Gemessene drehmomentunabhängige Verluste und berechnete drehmomentabhängige Verluste (Getriebeprüfoption 1) |
| Option 2: | Gemessene drehmomentunabhängige Verluste und gemessene drehmomentabhängige Verluste bei Volllast (Getriebeprüfoption 2) |
| Option 3: | Messung unter Volllastpunkten (Getriebeprüfoption 3) |
Die Winkelgetriebeverluste sind nach dem Verfahren gemäß der Beschreibung für die zugehörige Getriebeprüfoption in Absatz 3 zu messen, wobei für die Anforderungen folgende Abweichung gilt:
6.1.1.1. Geltender Drehzahlbereich:
Von 200 U/min (an der Welle, die mit dem Winkelgetriebe verbunden ist) bis zur maximalen Drehzahl gemäß Spezifikationen des Winkelgetriebes oder bis zur letzten Drehzahlstufe vor der festgelegten maximalen Drehzahl.
6.1.1.2 Größe der Drehzahlstufen: 200 U/min
6.1.2. Fall B: Einzelne Messung eines Winkelgetriebes, das mit einem Getriebe verbunden ist
Für den Fall, dass das Winkelgetriebe zusammen mit einem Getriebe geprüft wird, muss die Prüfung entsprechend einer der für die Getriebeprüfung festgelegten Optionen erfolgen:
| Option 1: | Gemessene drehmomentunabhängige Verluste und berechnete drehmomentabhängige Verluste (Getriebeprüfoption 1) |
| Option 2: | Gemessene drehmomentunabhängige Verluste und gemessene drehmomentabhängige Verluste bei Volllast (Getriebeprüfoption 2) |
| Option 3: | Messung unter Volllastpunkten (Getriebeprüfoption 3) |
6.1.2.1. Der Hersteller hat die Möglichkeit, die Winkelgetriebeverluste von den Verlusten des Getriebes insgesamt abzugrenzen, indem er die Prüfungen in der nachstehend beschriebenen Reihenfolge vornimmt:
=Tl,in,withad
=Tl,in,withoutad
=Tl,in,adsys= Tl,in,withad- Tl,in,withoutad
6.2. Ergänzung zu den Eingabedateien für das Simulationsinstrument
6.2.1 Als Drehmomentverlust für Drehzahlen unter der oben genannten Mindestdrehzahl ist der Drehmomentverlust bei der Mindestdrehzahl einzustellen.
6.2.2. In den Fällen, in denen es sich bei der höchsten geprüften Eingangsdrehzahl des Winkelgetriebes um die letzte Drehzahlstufe unterhalb des festgelegten zulässigen Höchstwerts für die Winkelgetriebedrehzahl handelt, ist eine Extrapolation des Drehmomentverlusts bis zur höchsten Drehzahl mit linearer Regression anhand der beiden letzten gemessenen Drehzahlstufen vorzunehmen.
6.2.3. Zur Berechnung der Drehmomentverlustdaten für die Eingangswelle des mit dem Winkelgetriebe zu verbindenden Getriebes ist auf die lineare Interpolation und Extrapolation zurückzugreifen.
7. Übereinstimmung der zertifizierten CO2-Emissionen und der für den Kraftstoffverbrauch maßgeblichen Eigenschaften
7.1. Alle Getriebe, Drehmomentwandler, sonstigen Drehmoment übertragenden Bauteile und zusätzlichen Bauteile des Antriebsstrangs müssen so hergestellt werden, dass sie mit dem genehmigten Typ übereinstimmen, was die Beschreibung laut Zertifizierung und deren Anhängen anbelangt. Die zertifizierten CO2-Emissionen und die für den Kraftstoffverbrauch maßgeblichen Eigenschaften müssen mit den Vorgaben nach Artikel 12 der Richtlinie 2007/46/EG übereinstimmen.
7.2. Der Drehmomentwandler, sonstige Drehmoment übertragende Bauteile und zusätzliche Bauteile des Antriebsstrangs sind von den Bestimmungen für die Prüfung der Übereinstimmung der Produktion nach Abschnitt 8 dieses Anhangs ausgenommen.
7.3. Die Übereinstimmung der zertifizierten CO2-Emissionen und der für den Kraftstoffverbrauch maßgeblichen Eigenschaften muss anhand der Beschreibung in den Zertifizierungen laut Anlage 1 dieses Anhangs überprüft werden.
7.4. Die Übereinstimmung der zertifizierten CO2-Emissionen und der für den Kraftstoffverbrauch maßgeblichen Eigenschaften muss entsprechend den in diesem Abschnitt genannten besonderen Bedingungen bewertet werden.
7.5. Einmal pro Jahr muss der Hersteller mindestens die Anzahl der Getriebe prüfen, die in Tabelle 3 angegeben ist, wobei die Gesamtproduktionszahl des Herstellers für Getriebe zugrunde gelegt wird. Zur Ermittlung der Produktionszahlen werden nur diejenigen Getriebe berücksichtigt, für die die in dieser Verordnung genannten Anforderungen gelten.
7.6. Jedes vom Hersteller geprüfte Getriebe muss repräsentativ für eine bestimmte Familie sein. Unbeschadet der Bestimmungen gemäß Absatz 7.10. muss nur ein Getriebe pro Familie geprüft werden.
7.7. Bei einer Jahresgesamtproduktion von 1.001 bis 10.000 Getrieben muss die Wahl der Familie, an der die Prüfung erfolgen soll, gemeinsam vom Hersteller und der Genehmigungsbehörde getroffen werden.
7.8. Bei einer Jahresgesamtproduktion von mehr als 10.000 Getrieben muss stets die Getriebefamilie mit dem höchsten Produktionsvolumen geprüft werden. Der Hersteller muss der Genehmigungsbehörde gegenüber die Anzahl der durchgeführten Prüfungen und die Wahl der Familien begründen (z.B. durch Nachweis der Verkaufszahlen). Die Wahl der übrigen Familien, an denen die Prüfungen durchgeführt werden sollen, muss gemeinsam vom Hersteller und der Genehmigungsbehörde getroffen werden.
Tabelle 3 Stichprobengröße für die Übereinstimmungsprüfung
| Jahresgesamtproduktion an Getrieben | Anzahl der Prüfungen |
| 0 - 1.000 | 0 |
| > 1.000 - 10.000 | 1 |
| > 10.000 - 30.000 | 2 |
| > 30.000 | 3 |
| > 100.000 | 4 |
7.9. Für die Prüfungen, die hinsichtlich der Übereinstimmung der zertifizierten CO2-Emissionen und der für den Kraftstoffverbrauch maßgeblichen Eigenschaften durchgeführt werden sollen, muss die Genehmigungsbehörde gemeinsam mit dem Hersteller die zu prüfenden Getriebetypen festlegen. Dabei muss die Genehmigungsbehörde sicherstellen, dass die ausgewählten Getriebearten nach denselben Normen hergestellt werden wie bei der Serienproduktion.
7.10. Liegt das Ergebnis einer Prüfung gemäß Nummer 8 über den in Absatz 8.1.3 genannten Angaben, müssen drei weitere Getriebe aus derselben Familie geprüft werden. Besteht mindestens ein weiteres Getriebe die Prüfung nicht, gelten die Bestimmungen von Artikel 23.
8. Überprüfung der Übereinstimmung der Produktion
Zur Überprüfung der Übereinstimmung der für die CO2-Emissionen und den Kraftstoffverbrauch maßgeblichen zertifizierten Eigenschaften ist in vorheriger Absprache zwischen einer Genehmigungsbehörde und dem Antragsteller folgendes Verfahren anzuwenden:
8.1. Übereinstimmungsprüfungen für Getriebe19
8.1.1. Der Wirkungsgrad des Getriebes ist anhand des vereinfachten Verfahrens gemäß der Beschreibung in diesem Abschnitt zu ermitteln.
8.1.2.1. Es gelten sämtliche in diesem Anhang festgelegten Randbedingungen für die Zertifizierungsprüfung.
Werden für die Ölart, die Öltemperatur und den Neigungswinkel andere Randbedingungen verwendet, muss der Hersteller den Einfluss dieser Bedingungen und derer, die für die Zertifizierung betreffend den Wirkungsgrad verwendet wurden, deutlich aufzeigen.
8.1.2.2. Für die Messung muss dieselbe Prüfoption verwendet werden wie für die Zertifizierungsprüfung, begrenzt auf die Betriebspunkte gemäß Angaben in diesem Abschnitt.
8.1.2.2.1 Für den Fall, dass Option 1 für die Zertifizierungsprüfung verwendet wurde, müssen die drehmomentunabhängigen Verluste für die beiden Drehzahlen laut Angaben in Absatz 8.1.2.2.2 Ziffer 3 gemessen und für die Berechnung der Drehmomentverluste an den drei höchsten Drehmomentstufen verwendet werden.
Für den Fall, dass Option 2 für die Zertifizierungsprüfung verwendet wurde, müssen die drehmomentunabhängigen Verluste für die beiden Drehzahlen nach Absatz 8.1.2.2.2 Ziffer 3 gemessen werden. Die drehmomentabhängigen Verluste bei maximalem Drehmoment müssen bei denselben beiden Drehzahlen gemessen werden. Die Drehmomentverluste an den drei höchsten Drehmomentstufen müssen per Interpolation gemäß der Beschreibung im Zertifizierungsverfahren ermittelt werden.
Für den Fall, dass Option 3 für die Zertifizierungsprüfung verwendet wurde, müssen die Drehmomentverluste für die 18 Betriebspunkte nach den Angaben in Absatz 8.1.2.2.2 gemessen werden.
8.1.2.2.2 Der Wirkungsgrad des Getriebes muss für 18 Betriebspunkte ermittelt werden, für die folgende Anforderungen gelten:
8.1.2.3 Für jeden der 18 Betriebspunkte muss der Wirkungsgrad des Getriebes anhand folgender Gleichung berechnet werden:
ηi = (Tout · nout) / (Tin · nin)
dabei gilt:
| ηi | = | Wirkungsgrad jedes Betriebspunkts von 1 bis 18 |
| Tout | = | Ausgangsdrehmoment [Nm] |
| Tin | = | Eingangsdrehmoment [Nm] |
| nin | = | Eingangsdrehzahl [U/min] |
| nout | = | Ausgangsdrehzahl [U/min] |
8.1.2.4 Der Gesamtwirkungsgrad während der Prüfungen, die hinsichtlich der Übereinstimmung der zertifizierten CO2-Emissionen und der für den Kraftstoffverbrauch maßgeblichen Eigenschaften durchgeführt werden (ηA,CoP), errechnet sich aus dem arithmetischen Mittel der Wirkungsgrade aller 18 Betriebspunkte.
ηA,CoP = (η1 + η2 + [...] + η18) / 18
8.1.3 Die Prüfung, die hinsichtlich der Übereinstimmung der zertifizierten CO2-Emissionen und der für den Kraftstoffverbrauch maßgeblichen Eigenschaften durchgeführt wird, gilt als bestanden, wenn folgende Bedingung zutrifft:
Der Wirkungsgrad des geprüften Getriebes während der Prüfung, die hinsichtlich der Übereinstimmung der zertifizierten CO2-Emissionen und der für den Kraftstoffverbrauch maßgeblichen Eigenschaften durchgeführt wird (ηA, CoP), darf nicht unter X % des für den Getriebetyp genehmigten WirkungsgradsηA,TA liegen.
ηA,TA - ηA,CoP ≤ X
Bei Schaltgetrieben, automatisierten Schaltgetrieben und Doppelkupplungsgetrieben muss X durch 1,5 % und bei Automatikgetrieben bzw. bei Getrieben mit mehr als 2 Reibungsschaltkupplungen durch 3 % ersetzt werden.
| Muster einer Bescheinigung für ein Bauteil, eine selbständige technische Einheit oder ein System | Anlage 1 |
Größtes Format: A4 [210 × 297 mm]
Bescheinigung der Eigenschaften einer Getriebefamilie/Drehmomentwandlerfamilie/Familie sonstiger Drehmoment übertragender Bauteile/Familie zusätzlicher Bauteile des Antriebsstrangs 1 in bezug auf die CO2-Emissionen und den Kraftstoffverbrauch
| Mitteilung über: |
|
einer Bescheinigung im Hinblick auf die Verordnung (EG) Nr. 595/2009, durchgeführt durch die Verordnung (EU) 2017/2400.
Verordnung (EG) Nr. XXXXX und Verordnung (EU) 2017/2400, zuletzt geändert durch ...
Nummer der Bescheinigung:
Hash:
Grund für die Erweiterung:
0.1. Fabrikmarke (Firmenname des Herstellers)
0.2. Typ:
0.3. Kennzeichen zur Typidentifizierung, sofern am Bauteil vorhanden
0.3.1. Stelle, an der diese Bezeichnung angebracht ist:
0.4. Name und Anschrift des Herstellers:
0.5. Bei Bauteilen und selbstständigen technischen Einheiten: Anbringungsstelle und Anbringungsart des EG-Typgenehmigungszeichens:
0.6. Namen und Anschriften der Fertigungsstätten:
0.7. (Gegebenenfalls) Name und Anschrift des Bevollmächtigten des Herstellers
1. (Gegebenenfalls) zusätzliche Angaben: siehe Beiblatt
1.1. Gewählte Möglichkeit zur Bestimmung der Drehmomentverluste
1.1.1. Bei Getrieben: für jeden Getriebegang separat für die beiden Ausgangsdrehmomentbereiche 0-10 kNm und > 10 kNm angeben.
2. Genehmigungsbehörde, die für die Durchführung der Prüfungen zuständig ist:
3. Datum des Prüfberichts
4. Nummer des Prüfberichts
5. Bemerkungen (falls zutreffend): siehe Beiblatt
6. Ort
7. Date
8. Unterschrift
Anlagen:
| Getriebe-Beschreibungsbogen | Anlage 219 |
| Beschreibungsbogen Nr.: | Betrifft:
Ausstellungsdatum: Änderungsdatum: |
gemäß ...
Getriebeart/-familie
(falls zutreffend)
...
0. Allgemein
0.1. Name und Anschrift des Herstellers:
0.2. Fabrikmarke (Firmenname des Herstellers)
0.3. Getriebetyp
0.4. Getriebefamilie:
0.5. Getriebetyp als selbstständige technische Einheit/Getriebefamilie als selbstständige technische Einheit
0.6. Handelsnamen (sofern vorhanden):
0.7. Merkmale zur Modellidentifizierung (falls am Getriebe vorhanden):
0.8. Bei Bauteilen und selbstständigen technischen Einheiten: Anbringungsstelle und Anbringungsart des EG-Typgenehmigungszeichens:
0.9. Namen und Anschriften der Fertigungsstätten:
0.10. Name und Anschrift des Bevollmächtigten des Herstellers:
Teil 119
Wesentliche Merkmale des (Stamm-) Getriebes und der Getriebetypen innerhalb einer Getriebefamilie

0.0. - gestrichen -
0.1. - gestrichen -
0.2. - gestrichen -
0.3. - gestrichen -
0.4. - gestrichen -
0.5. - gestrichen -
0.6. - gestrichen -
0.7. - gestrichen -
0.8. - gestrichen -
0.9. - gestrichen -
1.0. Spezifische Angaben zum Getriebe/zur Getriebefamilie
1.1. Getriebeübersetzung, Getriebeschema und Leistungsfluss
1.2. Abstand der Wellenachsen bei Getrieben mit Vorlegewelle
1.3. Art der Lager an den entsprechenden Stellen (falls vorhanden)
1.4. Art der Schaltelemente (Zahnkupplungen einschließlich Synchronringe oder Reibungskupplungen) an den entsprechenden Stellen (falls vorhanden)
1.5. Zahnradbreite für Option 1 oder Zahnradbreite ± 1 mm für Option 2 oder 3
1.6. Gesamtzahl der Vorwärtsgänge
1.7. Zahl der Zahnschaltkupplungen
1.8. Zahl der Synchronringe
1.9. Zahl der Scheiben bei Reibungskupplungen (außer bei nur einer Trockenkupplung mit einer oder zwei Scheiben)
1.10. Außendurchmesser der Scheiben von Reibungskupplungen (außer bei nur einer Trockenkupplung mit einer oder zwei Scheiben)
1.11. Oberflächenrauheit der Zähne (einschließlich Zeichnungen)
1.12. Zahl der dynamischen Wellendichtringe
1.13. Ölfluss zur Schmierung und Kühlung pro Umdrehung der Getriebeeingangswelle
1.14. Viskosität des Öls bei 100 °C (± 10 %)
1.15. Systemdruck bei hydraulisch gesteuerten Getrieben
1.16. Angegebener Ölstand in Bezug auf die zentrale Achse und entsprechend der Angabe in den Zeichnungen (auf der Grundlage des Durchschnittswertes zwischen unterer und oberer Toleranz) bei Stillstand oder im Betrieb. Der Ölstand gilt als ausgeglichen, wenn alle drehenden Getriebeteile (ausgenommen die Ölpumpe und ihr Antrieb) oberhalb des angegebenen Ölstandes liegen.
1.17. Angegebener Ölstand (± 1mm)
1.18. Getriebeübersetzungen [-] und maximales Eingangsdrehmoment [Nm], maximale Eingangsleistung (kW) und maximale Eingangsdrehzahl [U/min]
1. Gang2. Gang
3. Gang
4. Gang
5. Gang
6. Gang
7. Gang
8. Gang
9. Gang
10. Gang
11. Gang
12. Gang
n. Gang
Liste der Anlagen
| Nr. | Beschreibung: | Ausstellungsdatum: |
| 1 | Angaben zu den Bedingungen der Getriebeprüfung | ... |
| 2 | ... |
Anlage 1 zum Getriebe-Beschreibungsbogen
Angaben zu den Prüfbedingungen (falls zutreffend)
| 1.1. Messung mit Dauerbremseinrichtung | ja/nein |
| 1.2. Messung mit Winkelgetriebe | ja/nein |
| 1.3. Maximale geprüfte Eingangsdrehzahl [U/min] | |
| 1.4. Maximales geprüftes Eingangsdrehmoment [Nm] |
| Beschreibungsbogen für einen hydrodynamischen Drehmomentwandler (TC) | Anlage 319 |
| Beschreibungsbogen Nr.: | Betrifft:
Ausstellungsdatum: Änderungsdatum: |
gemäß ...
TC-Typ/-Familie
(falls zutreffend)
...
0. Allgemein
0.1. Name und Anschrift des Herstellers:
0.2. Fabrikmarke (Firmenname des Herstellers)
0.3. TC-Typ
0.4. TC-Familie
0.5. TC-Typ als selbstständige technische Einheit/TC-Familie als selbstständige technische Einheit
0.6. Handelsnamen (sofern vorhanden):
0.7. Merkmale zur Modellidentifizierung (falls am TC vorhanden):
0.8. Bei Bauteilen und selbstständigen technischen Einheiten: Anbringungsstelle und Anbringungsart des EG-Typgenehmigungszeichens:
0.9. Namen und Anschriften der Fertigungsstätten:
0.10. Name und Anschrift des Bevollmächtigten des Herstellers:
Teil 119
Wesentliche Merkmale des (Stamm-) TC und der TC-Typen innerhalb einer TC-Familie

0.0. - gestrichen -
0.1. - gestrichen -
0.2. - gestrichen -
0.3. - gestrichen -
0.4. - gestrichen -
0.5. - gestrichen -
0.6. - gestrichen -
0.7. - gestrichen -
0.8. - gestrichen -
0.9. - gestrichen -
1.0. Spezifische Angaben zum Drehmomentwandler/zur Drehmomentwandlerfamilie
1.1. Für hydrodynamische Drehmomentwandler ohne mechanisches Getriebe (serielle Anordnung)
1.1.1. Außendurchmesser des torusförmigen Arbeitsraums
1.1.2. Innendurchmesser des torusförmigen Arbeitsraums
1.1.3. Anordnung von Pumpenrad (P), Turbinenrad (T) und Leitrad (Stator, S) in Flussrichtung
1.1.4. Breite des torusförmigen Arbeitsraums
1.1.5. Ölart gemäß den Prüfvorschriften
1.1.6. Konstruktion der Schaufeln;
1.2. Für hydrodynamische Drehmomentwandler mit mechanischem Getriebe (parallele Anordnung)
1.2.1. Außendurchmesser des torusförmigen Arbeitsraums
1.2.2. Innendurchmesser des torusförmigen Arbeitsraums
1.2.3. Anordnung von Pumpenrad (P), Turbinenrad (T) und Leitrad (Stator, S) in Flussrichtung
1.2.4. Breite des torusförmigen Arbeitsraums
1.2.5. Ölart gemäß den Prüfvorschriften
1.2.6. Konstruktion der Schaufeln;
1.2.7. Getriebeschema und Leistungsfluss im Drehmomentwandelmodus;
1.2.8. Art der Lager an den entsprechenden Positionen (falls vorhanden);
1.2.9. Art der Kühl-/Schmiermittelpumpe (Verweis auf die Teileliste)
1.2.10. Art der Schaltelemente (Zahnkupplungen (einschließlich Synchronringe) ODER Reibungskupplungen) an den entsprechenden Positionen, falls vorhanden.
1.2.11. Ölstand entsprechend Zeichnung bezogen auf die zentrale Achse
Liste der Anlagen
| Nr. | Beschreibung: | Ausstellungsdatum: |
| 1 | Angaben zu den Bedingungen der Drehmomentwandlerprüfung | ... |
| 2 | ... |
Anlage 1 zum Drehmomentwandler-Beschreibungsbogen
Angaben zu den Prüfbedingungen (falls zutreffend)
| 1. | Messverfahren | |
| 1.1. | TC mit mechanischem Getriebe | ja/nein |
| 1.2. | TC als selbstständige Einheit | ja/nein |
| Beschreibungsbogen für sonstige Drehmoment übertragende Bauteile (OTTC) | Anlage 419 |
| Beschreibungsbogen Nr.: | Betrifft:
Ausstellungsdatum: Änderungsdatum: |
gemäß ...
OTTC-Typ/-Familie
(falls zutreffend)
...
...
0. Allgemein
0.1. Name und Anschrift des Herstellers:
0.2. Fabrikmarke (Firmenname des Herstellers)
0.3. Typ des OTTC
0.4. OTTC-Familie
0.5. OTTC-Typ als selbstständige technische Einheit/OTTC-Familie als selbstständige technische Einheit
0.6. Handelsnamen (sofern vorhanden):
0.7. Merkmale zur Modellidentifizierung (falls am OTTC vorhanden):
0.8. Bei Bauteilen und selbstständigen technischen Einheiten: Anbringungsstelle und Anbringungsart des EG-Typgenehmigungszeichens:
0.9. Namen und Anschriften der Fertigungsstätten:
0.10. Name und Anschrift des Bevollmächtigten des Herstellers:
Teil 119
Wesentliche Merkmale des (stamm-) OTTC und der OTTC-Typen innerhalb einer OTTC-Familie

0.0. - gestrichen -
0.1. - gestrichen -
0.2. - gestrichen -
0.3. - gestrichen -
0.4. - gestrichen -
0.5. - gestrichen -
0.6. - gestrichen -
0.7. - gestrichen -
0.8. - gestrichen -
0.9. - gestrichen -
1.0. Spezifische Angaben zum OTTC
1.1. Für hydrodynamische Drehmoment übertragende Bauteile (OTTC)/Dauerbremseinrichtungen
1.1.1. Außendurchmesser des torusförmigen Arbeitsraums
1.1.2. Breite des torusförmigen Arbeitsraums
1.1.3. Konstruktion der Schaufeln;
1.1.4. Betriebsfluid
1.1.5. Außendurchmesser des torusförmigen Arbeitsraums - Innendurchmesser des torusförmigen Arbeitsraums (OD-ID)
1.1.6. Zahl der Schaufeln
1.1.7. Viskosität des Betriebsfluids
1.2. Für magnetisch Drehmoment übertragende Bauteile (OTTC)/Dauerbremseinrichtungen
1.2.1. Konstruktion der Trommel (Dauerbremseinrichtung mit Elektro- oder Dauermagneten)
1.2.2. Außendurchmesser des Rotors
1.2.3. Konstruktion der Kühlschaufeln
1.2.4. Konstruktion der Schaufeln;
1.2.5. Betriebsfluid
1.2.6. Außendurchmesser des Rotors - Innendurchmesser des Rotors (OD-ID)
1.2.7. Zahl der Rotoren
1.2.8. Zahl der Kühlschaufeln/Schaufeln
1.2.9. Viskosität des Betriebsfluids
1.2.10. Zahl der Arme
1.3. Für Drehmoment übertragenden Bauteile (OTTC)/hydrodynamische Kupplung
1.3.1. Außendurchmesser des torusförmigen Arbeitsraums
1.3.2. Breite des torusförmigen Arbeitsraums
1.3.3. Konstruktion der Schaufeln
1.3.4. Viskosität des Betriebsfluids
1.3.5. Außendurchmesser des torusförmigen Arbeitsraums - Innendurchmesser des torusförmigen Arbeitsraums (OD-ID)
1.3.6. Zahl der Schaufeln
Liste der Anlagen
| Nr. | Beschreibung: | Ausstellungsdatum: |
| 1 | Angaben zu den Bedingungen der OTTC-Prüfung | ... |
| 2 | ... |
Anlage 1 zum OTTC-Beschreibungsbogen
Angaben zu den Prüfbedingungen (falls zutreffend)
| 1. | Messverfahren | |
| Mit Getriebe | ja/nein | |
| Mit Motor | ja/nein | |
| Antriebsmechanismus | ja/nein | |
| direkt | ja/nein | |
| 2. | Maximale Prüfdrehzahl des Teils des OTTC mit der größten Drehmomentaufnahme, z.B. des Rotors der Dauerbremseinrichtung [U/min] | |
| Beschreibungsbogen für zusätzliche Bauteile des Antriebsstrangs (ADC) | Anlage 519 |
| Beschreibungsbogen Nr.: | Betrifft:
Ausstellungsdatum: Änderungsdatum: |
gemäß ...
ADC-Typ/-Familie
(falls zutreffend)
...
0. Allgemein
0.1. Name und Anschrift des Herstellers:
0.2. Fabrikmarke (Firmenname des Herstellers)
0.3. ADC-Typ:
0.4. ADC-Familie:
0.5. ADC-Typ als selbstständige technische Einheit/ADC-Familie als selbstständige technische Einheit
0.6. Handelsnamen (sofern vorhanden):
0.7. Merkmale zur Modellidentifizierung (falls am ADC vorhanden):
0.8. Bei Bauteilen und selbstständigen technischen Einheiten: Anbringungsstelle und Anbringungsart des EG-Typgenehmigungszeichens:
0.9. Namen und Anschriften der Fertigungsstätten:
0.10. Name und Anschrift des Bevollmächtigten des Herstellers:
Teil 119
Wesentliche Merkmale des (Stamm-)ADC und der ADC-Typen innerhalb einer ADC-Familie

0.0. - gestrichen -
0.1. - gestrichen -
0.2. - gestrichen -
0.3. - gestrichen -
0.4. - gestrichen -
0.5. - gestrichen -
0.6. - gestrichen -
0.7. - gestrichen -
0.8. - gestrichen -
0.9. - gestrichen -
1.0. Spezifische Angaben zum ADC/zum Winkelgetriebe
1.1. Getriebeübersetzung und Getriebeschema
1.2. Winkel zwischen Ein- und Ausgangswelle
1.3. Art der Lager an den entsprechenden Positionen.
1.4. Anzahl der Zähne pro Gangrad
1.5. Zahnradbreite
1.6. Zahl der dynamischen Wellendichtringe
1.7. Viskosität des Öls (± 10 %)
1.8. Oberflächenrauheit der Zähne
1.9. Angegebener Ölstand in Bezug auf die zentrale Achse und entsprechend der Angabe in den Zeichnungen (auf der Grundlage des Durchschnittswertes zwischen unterer und oberer Toleranz) bei Stillstand oder im Betrieb. Der Ölstand gilt als ausgeglichen, wenn alle drehenden Getriebeteile (ausgenommen die Ölpumpe und ihr Antrieb) oberhalb des angegebenen Ölstandes liegen.
1.10. Ölstand innen (± 1mm)
Liste der Anlagen
| Nr. | Beschreibung: | Ausstellungsdatum: |
| 1 | Angaben zu den Bedingungen der ADC-Prüfung | ... |
| 2 | ... |
Anlage 1 zum ADC-Beschreibungsbogen
Angaben zu den Prüfbedingungen (falls zutreffend)
| 1. | Messverfahren | |
| mit Getriebe | ja/nein | |
| Antriebsmechanismus | ja/nein | |
| direkt | ja/nein | |
| 2. | Maximale Prüfgeschwindigkeit am ADC-Eingang [U/min] | |
| Familienkonzept | Anlage 6 |
1. Allgemeines
Eine Getriebefamilie, Drehmomentwandlerfamilie, Familie von sonstigen Drehmoment übertragenden Bauteilen oder von zusätzlichen Bauteilen des Antriebsstrangs ist durch Konstruktions- und Leistungsmerkmale gekennzeichnet. Diese müssen für alle Mitglieder einer Familie die gleichen sein. Welche Getriebe, Drehmomentwandler, sonstige Drehmoment übertragenden Bauteile oder zusätzlichen Bauteile des Antriebsstrangs zu einer Familie gehören, kann der Hersteller nach eigenem Ermessen festlegen, solange er sich dabei an die Vorschriften dieser Anlage hält. Die entsprechende Familie ist von der Genehmigungsbehörde zu genehmigen. Der Hersteller muss der Genehmigungsbehörde die entsprechenden Daten zu den Mitgliedern einer Familie zur Verfügung stellen.
1.1. Sonderfälle
In manchen Fällen können Wechselwirkungen zwischen den Parametern vorliegen. Dies muss berücksichtigt werden, damit gewährleistet ist, dass einer Familie nur Getriebe, Drehmomentwandler, sonstige Drehmoment übertragende Bauteile oder zusätzliche Bauteile des Antriebsstrangs mit ähnlichen Eigenschaften zugeordnet werden. Diese Fälle sind vom Hersteller zu ermitteln und der Genehmigungsbehörde mitzuteilen. Sie werden anschließend als Kriterium zur Festlegung einer neuen Getriebefamilie, Drehmomentwandlerfamilie, Familie von sonstigen Drehmoment übertragenden Bauteilen oder von zusätzlichen Bauteilen des Antriebsstrangs berücksichtigt.
Sind Einrichtungen oder Merkmale vorhanden, die in Absatz 9 nicht aufgeführt sind, aber die Leistung stark beeinflussen, so muss sie der Hersteller nach den anerkannten Regeln der Technik feststellen und der Genehmigungsbehörde mitteilen. Sie werden anschließend als Kriterium zur Festlegung einer neuen Getriebefamilie, Drehmomentwandlerfamilie, Familie von sonstigen Drehmoment übertragenden Bauteilen oder von zusätzlichen Bauteilen des Antriebsstrangs berücksichtigt.
1.2. Im Familienkonzept werden Kriterien und Parameter festgelegt, die die Hersteller in die Lage versetzen sollen, Getriebe, Drehmomentwandler, sonstige Drehmoment übertragende Bauteile oder zusätzliche Bauteile des Antriebsstrangs in Familien und typen mit ähnlichen oder gleichen CO2-relevanten Daten einzuteilen.
2.Die Genehmigungsbehörde kann zu dem Schluss gelangen, dass der höchste Drehmomentverlust der Getriebefamilie, Drehmomentwandlerfamilie, Familie von sonstigen Drehmoment übertragenden Bauteilen oder Familie von zusätzlichen Bauteilen des Antriebsstrangs durch zusätzliche Prüfungen am besten zu bestimmen ist. In diesem Fall muss der Hersteller die geeigneten Angaben zur Bestimmung des Getriebes, des Drehmomentwandlers, des sonstigen Drehmoment übertragenden Bauteils oder des zusätzlichen Bauteils des Antriebsstrangs mit dem voraussichtlich höchsten Drehmomentverlust der Familie vorlegen.
Weisen die Mitglieder einer Familie weitere Merkmale auf, von denen man einen Einfluss auf die Drehmomentverluste erwarten kann, sind diese Merkmale ebenfalls zu bestimmen und bei der Auswahl des Stammmitglieds der Familie zu berücksichtigen.
3. Parameter für die Festlegung der Getriebefamilie
3.1. Folgende Kriterien müssen bei allen zu derselben Familie gehörenden Getrieben gleich sein:
3.2. Folgende Kriterien müssen bei allen Getrieben einer Getriebefamilie gleich sein. Die Anwendung einer spezifischen Spanne ist bei den nachfolgend aufgeführten Parametern mit Zustimmung der Genehmigungsbehörde zulässig.
4. Wahl des Stammgetriebes
Das Stammgetriebe ist nach den nachfolgend aufgeführten Kriterien auszuwählen.
5. Parameter für die Festlegung der Drehmomentwandlerfamilie
5.1. Folgende Kriterien müssen bei allen zu derselben Familie gehörenden Drehmomentwandlern (TC) gleich sein.
5.1.1. Für hydrodynamische Drehmomentwandler ohne mechanisches Getriebe (serielle Anordnung)
5.1.2. Für hydrodynamische Drehmomentwandler mit mechanischem Getriebe (parallele Anordnung)
5.1.3. Folgende Kriterien müssen bei allen Mitgliedern einer Familie von hydrodynamischen Drehmomentwandlern mit mechanischem Getriebe (parallele Anordnung) gleich sein. Die Anwendung einer spezifischen Spanne ist bei den nachfolgend aufgeführten Parametern mit Zustimmung der Genehmigungsbehörde zulässig.
6. Wahl des Stammdrehmomentwandlers
6.1. Für hydrodynamische Drehmomentwandler ohne mechanisches Getriebe (serielle Anordnung)
Solange alle Kriterien nach Nummer 5.1.1 identisch sind, kann jeder Drehmomentwandler ohne mechanisches Getriebe einer Familie als Stammdrehmomentwandler ausgewählt werden.
6.2. Für hydrodynamische Drehmomentwandler mit mechanischem Getriebe
Der Stamm der Familie hydrodynamischer Drehmomentwandler mit mechanischem Getriebe (Parallelanordnung) ist nach dem nachfolgend aufgeführten Kriterium auszuwählen.
7. Parameter für die Festlegung der Familie sonstiger Drehmoment übertragender Bauteile (OTTC)
7.1. Folgende Kriterien müssen bei allen Mitgliedern einer Familie von hydrodynamischen Drehmoment übertragenden Bauteilen oder Dauerbremseinrichtungen gleich sein:
7.2. Folgende Kriterien müssen bei allen Mitgliedern einer Familie von magnetischen Drehmoment übertragenden Bauteilen/Dauerbremseinrichtungen gleich sein:
7.3. Folgende Kriterien müssen bei allen Mitgliedern einer Familie von Drehmoment übertragenden Bauteilen/hydrodynamischen Kupplungen gleich sein:
7.4. Folgende Kriterien müssen alle Mitglieder einer Familie von hydrodynamischen Drehmoment übertragenden Bauteilen oder Dauerbremseinrichtungen gemeinsam haben. Die Anwendung einer spezifischen Spanne ist bei den nachfolgend aufgeführten Parametern mit Zustimmung der Genehmigungsbehörde zulässig.
7.5. Folgende Kriterien müssen alle Mitglieder einer Familie von magnetischen Drehmoment übertragenden Bauteilen/Dauerbremseinrichtungen gemeinsam haben. Die Anwendung einer spezifischen Spanne ist bei den nachfolgend aufgeführten Parametern mit Zustimmung der Genehmigungsbehörde zulässig.
7.6. Folgende Kriterien müssen alle Mitglieder einer Familie von Drehmoment übertragenden Bauteilen/hydrodynamischen Kupplungen gemeinsam haben. Die Anwendung einer spezifischen Spanne ist bei den nachfolgend aufgeführten Parametern mit Zustimmung der Genehmigungsbehörde zulässig.
8. Wahl des Stammbauteils der Familie von Drehmoment übertragenden Bauteilen
8.1. Das Stammbauteil der Familie von hydrodynamischen Drehmoment übertragenden Bauteilen/Dauerbremseinrichtungen ist nach den nachfolgend aufgeführten Kriterien auszuwählen:
8.2. Das Stammbauteil der Familie von magnetischen Drehmoment übertragenden Bauteilen/Dauerbremseinrichtungen ist nach den nachfolgend aufgeführten Kriterien auszuwählen:
8.3. Das Stammbauteil der Familie von Drehmoment übertragenden Bauteilen/hydrodynamischen Kupplungen ist nach den nachfolgend aufgeführten Kriterien auszuwählen:
9. Parameter zur Definition der Familie von zusätzlichen Bauteilen des Antriebsstrangs
9.1 Folgende Kriterien müssen bei allen Mitgliedern einer Familie von zusätzlichen Bauteilen des Antriebsstrangs/von Winkelgetrieben gleich sein:
9.2. Folgende Kriterien müssen alle Mitglieder einer Familie von zusätzlichen Bauteilen des Antriebsstrangs/von Winkelgetrieben gemeinsam haben. Die Anwendung einer spezifischen Spanne ist bei den nachfolgend aufgeführten Parametern mit Zustimmung der Genehmigungsbehörde zulässig.
10. Wahl des Stammbauteils der Familie von zusätzlichen Bauteilen des Antriebsstrangs
10.1. Das Stammbauteil der Familie von zusätzlichen Bauteilen des Antriebsstrangs/Winkelgetrieben ist nach den nachfolgend aufgeführten Kriterien auszuwählen:
| Kennzeichnung und Nummerierung | Anlage 719 |
1. Kennzeichnungen19
Ein nach diesem Anhang zertifiziertes Bauteil muss folgende Kennzeichnungen tragen:
1.1. Herstellername oder Handelsmarke
1.2. Fabrikmarke und typenbezeichnung gemäß Angaben in Anlagen 2- 5 Nummern 0.2 und 0.3 dieses Anhangs
1.3. Das Zertifizierungszeichen (falls zutreffend) besteht aus einem Rechteck, das den Kleinbuchstaben "e" umgibt, gefolgt von der jeweiligen Kennziffer des Mitgliedstaats, der die Zertifizierung erteilt hat:
1 für Deutschland,2 für Frankreich,
3 für Italien,
4 für die Niederlande,
5 für Schweden,
6 für Belgien,
7 für Ungarn,
8 für die Tschechische Republik,
9 für Spanien,
11 für das Vereinigte Königreich,
12 für Österreich,
13 für Luxemburg,
17 für Finnland,
18 für Dänemark,
19 für Rumänien,
20 für Polen,
21 für Portugal,
23 für Griechenland,
24 für Irland,
25 für Kroatien,
26 für Slowenien,
27 für die Slowakei,
29 für Estland,
32 für Lettland,
34 für Bulgarien,
36 für Litauen,
49 für Zypern,
50 für Malta.
1.4. Das Zertifizierungszeichen muss in der Nähe des Rechtecks die in Anhang VII der Richtlinie 2007/46/EG für Abschnitt 4 der Typgenehmigungsnummer vorgeschriebene "Basis-Typgenehmigungsnummer" umfassen, davor steht die zweistellige laufende Nummer zur Bezeichnung der letzten technischen Änderung dieser Verordnung und ein Buchstabe zur Bezeichnung des Teils, für das die Zertifizierung ausgestellt wurde.
Für diese Verordnung ist die laufende Nummer 00.
Der Buchstabe für diese Verordnung ist in Tabelle 1 festgelegt.
| T | Getriebe |
| C | Drehmomentwandler (TC) |
| O | Sonstiges Drehmoment übertragendes Bauteil (OTTC) |
| D | Zusätzliches Bauteil des Antriebsstrangs (ADC) |
1.5. Beispiel für das Zertifizierungszeichen19
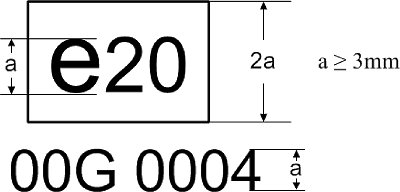
Das oben dargestellte, an einem Getriebe, Drehmomentwandler (TC), sonstigen Drehmoment übertragenden Bauteil (OTTC) oder zusätzlichen Bauteil des Antriebsstrangs (ADC) angebrachte Zertifizierungszeichen besagt, dass der betreffende Typ in Polen (e20) gemäß dieser Verordnung genehmigt wurde. Die beiden ersten Ziffern (00) beziehen sich auf die laufende Nummer der letzten technischen Änderung dieser Verordnung. Das nachfolgende Zeichen gibt an, dass die Zertifizierung für ein Getriebe (T) erteilt wurde. Die letzten vier Ziffern (0004) sind die dem Getriebe von der Typgenehmigungsbehörde zugeteilte Basis-Typgenehmigungsnummer.
1.6. Auf Antrag der Person, die die Zertifizierung beantragt und nach vorheriger Einigung mit der Typgenehmigungsbehörde können auch andere Zeichengrößen als unter Nummer 1.5 angegeben verwendet werden. Diese müssen weiterhin deutlich lesbar sein.
1.7. Die Kennzeichnungen, Label, Schilder oder Aufkleber müssen die gesamte Nutzlebensdauer des Getriebes, Drehmomentwandlers (TC), sonstigen Drehmoment übertragenden Bauteils (OTTC) oder zusätzlichen Bauteils des Antriebsstrangs (ADC) halten, deutlich lesbar und dauerhaft sein. Der Hersteller stellt sicher, dass die Kennzeichnungen, Label, Schilder oder Aufkleber nicht entfernt werden können, ohne dass sie dabei zerstört oder unleserlich werden.
1.8. Werden von derselben Genehmigungsbehörde für ein Getriebe, einen Drehmomentwandler, ein sonstiges Drehmoment übertragendes Bauteil oder ein zusätzliches Bauteil des Antriebsstrangs separate Zertifizierungen ausgestellt und werden diese Teile kombiniert eingebaut, genügt die Angabe eines der Zertifizierungszeichen nach Nummer 1.3. Auf dieses Zertifizierungszeichen folgen, abgetrennt durch "/", die für das jeweilige Getriebe, den Drehmomentwandler, das sonstige Drehmoment übertragende Bauteil oder zusätzliche Bauteil des Antriebsstrangs geltenden Kennzeichen nach Nummer 1.4.
1.9. Das Zertifizierungszeichen muss sichtbar sein, wenn das Getriebe, der Drehmomentwandler, das sonstige Drehmoment übertragende Bauteil oder das zusätzliche Bauteil des Antriebsstrangs in das Fahrzeug eingebaut ist, und ist an einem für den normalen Betrieb notwendigen Teil anzubringen, das während der Lebensdauer des Bauteils normalerweise nicht ausgetauscht werden muss.
1.10. Falls Drehmomentwandler oder sonstige Drehmoment übertragende Bauteile so gebaut sind, dass sie nach Zusammenbau mit einem Getriebe nicht zugänglich und/oder nicht sichtbar sind, ist das Zertifizierungszeichen des Drehmomentwandlers oder sonstigen Drehmoment übertragenden Bauteils am Getriebe anzubringen.
In dem in Absatz 1 beschriebenen Fall ist bei einem Drehmomentwandler oder sonstigen Drehmoment übertragenden Bauteil, der oder das nicht zertifiziert wurde, anstatt der Zertifizierungsnummer "-" auf dem Getriebe neben dem Buchstaben gemäß Nummer 1.4 anzugeben.
2. Zertifizierungsnummer19
2.1. Die Zertifizierungsnummer für Getriebe, Drehmomentwandler, sonstige Drehmoment übertragende Bauteile und zusätzliche Bauteile des Antriebsstrangs muss Folgendes umfassen:
eX*YYYY/YYYY*ZZZZ/ZZZZ*X*0000*00
| Abschnitt 1 | Abschnitt 2 | Abschnitt 3 | Zusätzlicher Buchstabe zu Abschnitt 3 | Abschnitt 4 | Abschnitt 5 |
| Angabe des Landes, das die Zertifizierung ausstellt | Verordnung über CO2-Zertifizierungen für schwere Nutzfahrzeuge (2017/2400) | Letzte Änderung der Verordnung (ZZZZ/ZZZZ) | Siehe Tabelle 1 dieser Anlage | Grundzertifizierungsnummer 0000 | Erweiterung 00 |
| Pauschalwerte für den Drehmomentverlust - Getriebe | Anlage 8 |
Errechnete Ausweichwerte auf der Grundlage des maximalen Nenndrehmoments des Getriebes:
Der DrehmomentverlustTl,in durch die Eingangswelle des Getriebes wird folgendermaßen berechnet:

Dabei gilt:
| Tl,in | = | Drehmomentverlust durch die Eingangswelle [Nm] |
| Tdx | = | Schleppdrehmoment bei x U/min [Nm] |
| Taddx | = | Zusätzliches Schleppdrehmoment bei Winkelgetriebe bei x U/min [Nm] |
| (falls zutreffend) | ||
| nin | = | Drehzahl der Eingangswelle [U/min] |
| fT | = | 1-η |
| η | = | Wirkungsgrad |
| fT | = | 0,01 für direkten Gang, 0,04 für indirekte Gänge |
| fT_add | = | 0,04 bei Winkelgetriebe (falls zutreffend) |
| Tin | Drehmoment an der Eingangswelle [Nm] |
Bei Getrieben mit Zahnschaltkupplungen (synchronisierte manuelle Getriebe (SMT), automatisierte Schaltgetriebe (AMT) und Doppelkupplungsgetrieben (DCT)) wird das SchleppdrehmomentTdx folgendermaßen berechnet:

Dabei gilt:
| Tmax,in | = | maximal zulässiges Eingangsdrehmoment in einem beliebigen Vorwärtsgang des Getriebes [Nm] |
| = | max(Tmax,in,gear) | |
| Tmax,in,gear | = | maximal zulässiges Eingangsdrehmoment in einem bestimmten Gang, wobei Gang = 1, 2, 3, ... größter Gang); bei Getrieben mit hydrodynamischen Drehmomentwandler ist dieses Eingangsdrehmoment das Drehmoment am Getriebeeingang vor dem Drehmomentwandler. |
Bei Getrieben mit Reibungsschaltkupplungen (> 2 Reibungskupplungen) wird das SchleppdrehmomentTdxfolgendermaßen berechnet:

"Reibungskupplung" bezeichnet in diesem Zusammenhang eine Kupplung oder Bremse, die mit Reibung arbeitet und in mindestens einem Gang zur dauernden Drehmomentübertragung erforderlich ist.
Bei Getrieben mit einem Winkelgetriebe (z.B. einem Kegelrad) ist das zusätzliche SchleppdrehmomentTaddx in der Berechnung vonTdx zu berücksichtigen:

(nur falls zutreffend)
| Allgemeines Modell - Drehmomentwandler | Anlage 9 |
Allgemeines Drehmomentwandlermodell auf der Grundlage von Standardtechnologie:
Zur Bestimmung der Eigenschaften des Drehmomentwandlers kann, in Abhängigkeit von spezifischen Motoreigenschaften, ein allgemeines Drehmomentwandlermodell angewandt werden.
Das allgemeine Drehmomentwandlermodell beruht auf den folgenden Motordaten:
| nrated | = | Maximale Motordrehzahl bei maximaler Leistung (bestimmt mithilfe der vom Motor-Vorverarbeitungsinstrument berechneten Volllastkurve) [U/min] |
| Tmax | = | Maximales Motordrehmoment (bestimmt mithilfe der vom Motor-Vorverarbeitungsinstrument berechneten Volllastkurve) [Nm] |
Die Eigenschaften des allgemeinen Drehmomentwandlermodells sind dadurch nur für Kombinationen mit einem Motor gültig, der dieselben spezifischen Eigenschaften aufweist.
Beschreibung des Vier-Punkte-Modells für den Drehmomentverlauf des Drehmomentwandlers:
Allgemeiner Drehmomentverlauf und allgemeines Drehmomentverhältnis:
Abbildung 1 Allgemeiner Drehmomentverlauf

Abbildung 2 Allgemeines Drehmomentverhältnis

Dabei gilt:
| TP1000 | = Bezugsdrehmoment der Pumpe TP1000 = TP (1.000 rpm / nP)2 [Nm] |
| v | = Drehzahlverhältnis ν = n2/n1 [-] |
| µ | = Drehmomentverhältnis µ = T2/T1 [-] |
| vs | = Drehzahlverhältnis am Freilaufpunkt νs = n2/n1 [-]
Bei Drehmomentwandlern mit rotierendem Gehäuse (Typ Trilock) ist vs typischerweise 1. Bei sonstigen Drehmomentwandlerkonstruktionen, speziell bei Konstruktionen mit Leistungsteilung, kann vs auch andere Werte als 1 haben. |
| vc | = Drehzahlverhältnis am Kupplungspunkt; νc = n2/n1 [-] |
| v0 | = Anfahrpunkt ν0 = 0 [U/min] |
| vm | = Übergangs-Drehzahlverhältnis νm = n2/n1 [-] |
Das Modell erfordert folgende Definitionen zur Berechnung des allgemeinen Drehmomentverlaufs:
Anfahrpunkt:

Übergangspunkt:
TP1000 (νm) = 0,8 ×TP1000(νo)
Kupplungspunkt:
TP1000(νS) = 0,5 × TP1000(νo)
Freilaufpunkt:
TP1000(νs) = 0
Das Modell erfordert folgende Definitionen zur Berechnung des allgemeinen Drehmomentverhältnisses:
Anfahrpunkt:
µ(ν0) = 1,8 / νs
Übergangspunkt:
Kupplungspunkt:
µ(νc) = 0,95 / νs
Freilaufpunkt:
µ(νs) = 0,95 / νs
Wirkungsgrad:
n = µ * ν
Zwischen den berechneten spezifischen Punkten ist eine lineare Interpolation vorzunehmen.
| Pauschalwerte für den Drehmomentverlust - sonstige Drehmoment übertragende Bauteile | Anlage 10 |
Berechnete Pauschalwerte für den Drehmomentverlust für sonstige Drehmoment übertragende Bauteile:
Für hydrodynamische Dauerbremseinrichtungen (Öl oder Wasser) ist das Schleppdrehmoment der Dauerbremseinrichtung folgendermaßen zu berechnen:

Für magnetische Dauerbremseinrichtungen (Dauer- oder Elektromagneten) ist das Schleppdrehmoment der Dauerbremseinrichtung folgendermaßen zu berechnen:

Dabei gilt:
| Tretarder | = | Drehmomentverlust der Dauerbremseinrichtung [Nm] |
| nretarder | = | Rotordrehzahl der Dauerbremseinrichtung [U/min] (siehe Absatz 5.1 dieses Anhangs) |
| istep-up | = | Übersetzungsverhältnis = Rotordrehzahl der Dauerbremseinrichtung/Drehzahl des Antriebsbauteils (siehe Absatz 5.1 dieses Anhangs) |
| Pauschalwerte für den Drehmomentverlust - Winkelgetriebe | Anlage 11 |
Entsprechend dem Berechnungsverfahren für die Pauschalwerte des Drehmomentverlusts eines Getriebes mit Winkelgetriebe nach Anlage 8 sind die Pauschal-Drehmomentverluste eines Winkelgetriebes ohne Getriebe folgendermaßen zu berechnen:

Dabei gilt:
| Tl,in | = | Drehmomentverlust durch die Eingangswelle des Getriebes [Nm] |
| Taddx | = | Zusätzliches Schleppdrehmoment bei Winkelgetriebe bei x U/min [Nm]
(falls zutreffend) |
| nin | = | Drehzahl der Eingangswelle des Getriebes [U/min] |
| fT | = | 1-η;
η= Wirkungsgrad fT_add = 0,04 für den Winkelgetriebe |
| Tin | = | Drehmoment an der Eingangswelle des Getriebes [Nm] |
| Tmax,in | = | maximal zulässiges Eingangsdrehmoment in einem beliebigen Vorwärtsgang des Getriebes [Nm] |
| = | max(Tmax,in,gear) | |
| Tmax,in | = | maximal zulässiges Eingangsdrehmoment in einem bestimmten Gang, wobei Gang = 1, 2, 3, ... größter Gang) |

Die nach dem vorstehenden Verfahren berechneten Drehmomentverluste können zu den nach den Optionen 1 bis 3 ermittelten Drehmomentverlusten eines Getriebes hinzugefügt werden, um die Drehmomentverluste des jeweiligen Getriebes in Kombination mit einem Winkelgetriebe zu erhalten.
|
weiter . | |
(Stand: 24.08.2022)
Alle vollständigen Texte in der aktuellen Fassung im Jahresabonnement
Nutzungsgebühr: 90.- € netto (Grundlizenz)
(derzeit ca. 7200 Titel s.Übersicht - keine Unterteilung in Fachbereiche)
Die Zugangskennung wird kurzfristig übermittelt
? Fragen ?
Abonnentenzugang/Volltextversion



