umwelt-online: Richtlinie 2002/49/EG über die Bewertung und Bekämpfung von Umgebungslärm - Anhang II (2)
|
zurück |
2.6. Allgemeine Bestimmungen - Fluglärm
2.6.1. Begriffsbestimmungen und Symbole
Im Folgenden werden wichtigeBegriffe mit der allgemeinen Bedeutung bestimmt, die ihnen in diesem Dokument zugeordnet wird. Die Zusammenstellung ist nicht vollständig; nur häufig verwendete Ausdrücke und Akronyme wurden aufgenommen. Andere werden an der Stelle beschrieben, an der sie erstmals erscheinen.
Bei den (nach den Begriffen aufgelisteten) mathematischenSymbolen handelt es sich um die wichtigsten Symbole, die in den Gleichungen im Textteil verwendet werden. Andere Symbole, die sowohl im Text als auch in den Anhängen nur gelegentlich erscheinen, werden an Ort und Stelle definiert.
Der Leser wird regelmäßig darauf hingewiesen, dass die WorteSchall undLärm in diesem Dokument austauschbar sind. Zwar ist das WortLärm mit subjektiven Assoziationen belegt - Akustiker definieren es für gewöhnlich als "unerwünschten Schall" -, doch im Bereich des Fluglärmschutzes wird es üblicherweise einfach im Sinne von Schall verwendet: durch Schallwellenbewegung übertragene Luftenergie. Das Symbol -> kennzeichnet Querverweise zu anderen Begriffen in der Liste.
Begriffe
| AIP | Luftfahrthandbuch (Aeronautical Information Publication) |
| Flugzeugkonfiguration | Die Positionen von Vorflügel, Landeklappen und Fahrwerk |
| Flugbewegung | An- oder Abflug oder sonstiger Flugzeugbetrieb, der sich auf die Lärmexposition rund um einen Flugplatz auswirkt |
| Lärm- und Leistungsdaten eines Flugzeugs | Daten, die die akustischen und leistungsbezogenen Werte verschiedener Flugzeugmuster beschreiben, die für den Modellierungsprozess erforderlich sind. Dazu gehören -> dieNPD-Beziehungen und Angaben, die eine Berechnung des Triebwerkschubs/der Triebwerksleistung in Abhängigkeit von der ->Flugkonfiguration ermöglichen. In der Regel werden diese Daten vom Flugzeughersteller bereitgestellt, doch auch aus anderen Quellen gewonnen, wenn die erstgenannte Möglichkeit nicht besteht. Sind keine Daten verfügbar, werden zur Darstellung des betreffenden Flugzeugs für gewöhnlich Daten eines hinreichend ähnlichen Flugzeugs angepasst; dies wird alsSubstitution bezeichnet. |
| Flughöhe | Flughöhe über Normalnull |
| ANP-Datenbank | Datenbank der Lärm- und Leistungsdaten der Flugzeuge (Aircraft Noise and Performance), beigefügt in Anhang I |
| A-bewerteter Schallpegel, LA | Der Maßstab des Basisschallpegels zur Messung des Umgebungslärms, einschließlich von Flugzeugen, auf dem die meisten Lärmkonturmessgrößen basieren |
| Kernflugweg | Ein repräsentativer oder nomineller Flugweg, der das Zentrum eines Korridors von Flugwegen definiert. |
| Basispegel eines Schallereignisses | Der aus einer NPD-Datenbank ausgelesene Schallereignispegel |
| Lösen der Bremsen | ->Start-of-Roll-Punkt |
| Korrigierter Nettoschub | Bei einer gegebenen Leistungseinstellung (z.B. EPR oder N1) fällt der Nettoschub mit der Luftdichte und somit mit zunehmender Flughöhe über NN; der korrigierte Nettoschub ist der Wert auf Meereshöhe.Nettoschub ist der Wert auf Meereshöhe. |
| Kumulativer Schall-/ Lärmpegel | Ein Dezibel-Maß des über einen festgelegten Zeitraum an einem Punkt in der Nähe eines Flughafens empfangenen Fluglärms bei normalen Betriebsbedingungen und Flugbahnen. Er wird berechnet, indem die an diesem Punkt auftretenden Schall-/ Lärmpegel auf gewisse Weise aufsummiert werden. |
| Dezibel-Summe oder - Durchschnitt | Andernorts auch als "energetische" oder "logarithmische" Werte (im Gegensatz zu den arithmetischen Werten) bezeichnet. Wird verwendet, wenn es sinnvoll ist, die Summe oder den Durchschnitt der zugrunde liegenden energieartigen Mengen zu ermitteln; z.B.Dezibel-Summe |
| Energieanteil, F | Verhältnis der von einem Segment ausgehenden empfangenen Schallenergie zu der von einer unendlichen Flugbahn ausgehenden empfangenen Energie |
| Triebwerksleistungseinstellung | Wert des ->schallbezogenen Leistungsparameters, der zur Ermittlung der Schallemission aus einer NPD-Datenbank verwendet wird |
| Äquivalenter (Dauer-) Schallpegel, Leq | Ein Maß für den langfristigen Schall. Der Pegel eines hypothetischen gleichmäßigen Schalls, der über einen festgelegten Zeitraum die gleiche Gesamtenergie enthält wie der tatsächliche variable Schall. |
| Ereignislärmpegel | Dezibel-Maß, das die von einem vorbeifliegenden erzeugte Schallexposition beschreibt ->Lärmexpositionspegel |
| Flugkonfiguration | = ->Flugzeugkonfiguration + ->Flugparameter |
| Flugparameter | Flugzeugleistungseinstellung, -geschwindigkeit, -querneigung und -gewicht |
| Flugbahn | Der Weg eines Flugzeugs durch die Luft, dreidimensional definiert, in der Regel mit Bezugspunkt am Anfang der Startrollstrecke oder an der Landeschwelle |
| Flugbahnsegment | Teil einer Flugzeugflugbahn, der für Schallmodellierungszwecke durch eine gerade Linie endlicher Länge dargestellt wird |
| Flugverfahren | Die Abfolge von Arbeitsschritten, die von der Flugzeugbesatzung oder dem Flugmanagementsystem ausgeführt werden: ausgedrückt als Änderungen der Flugkonfiguration in Abhängigkeit vom Abstand entlang des Kurses über Grund. |
| Flugprofil | Schwankung der Flughöhe über Grund entlang des Flugwegs (beinhaltet bisweilen auch Änderungen der ->Flugkonfiguration), beschrieben durch eine Reihe von ->Profilpunkten |
| Bezugsebene | (oder nominelle Bezugsebene) Horizontale Bodenoberfläche durch den Flugplatzbezugspunkt, an dem die Konturen normalerweise berechnet werden |
| Geschwindigkeit über Grund | Geschwindigkeit eines Flugzeugs bezogen auf einen festen Punkt am Boden |
| Flugweg | Vertikalprojektion der Flugbahn auf die Bezugsebene |
| Flughöhe über Grund | Vertikale Entfernung zwischen Flugzeug und ->Bezugsebene |
| Integrierter Schallpegel | Auch bezeichnet als ->Einzelereignis-Lärmexpositionspegel |
| ISA | Internationale Standardatmosphäre - definiert von der ICAO. Definiert die Änderung von Lufttemperatur, -druck und -dichte in Abhängigkeit von der Höhe über Normalnull. Verwendet zur Normalisierung der Ergebnisse von Berechnungen zur Flugzeugkonstruktion und Analyse von Testdaten. |
| Dämpfung zur Seite | Zusätzliche, dem Vorhandensein der Bodenoberfläche direkt oder indirekt zurechenbare Dämpfung mit wachsendem Abstand. Erheblich bei niedrigen Höhenwinkeln (des Flugzeugs über der Bezugsebene) |
| Maximaler Lärm-/Schallpegel | Der höchste während eines Ereignisses erreichte Schallpegel |
| Normalnull, NN | Die Standardhöhenbezugsfläche, auf die sich die -> ISa bezieht |
| Nettoschub | Die von einem Triebwerk auf die Flugzeugzelle ausgeübte Schubkraft |
| Lärm | Lärm wird definiert als unerwünschter Schall. Aber mit Messgrößen wie demA-bewerteten Schallpegel (LA) und demLärmstörpegel (EPNL) wird der Schallpegel effektiv in Lärmpegel konvertiert. Trotz der entsprechend fehlenden Genauigkeit werden die Begriffe Schall und Lärm in diesem Dokument, wie auch andernorts, gelegentlich synonym verwendet - insbesondere in Verbindung mit dem WortPegel. |
| Lärmkontur | Eine Linie eines konstanten Wertes eines kumulativen Fluglärmpegels oder -indexes um einen Flughafen |
| Lärmimmission | Die nachteilige(n) Wirkung(en) von Lärm auf seine Empfänger; vor allem wird unterstellt, dass Lärmmesswerte Indizes für die Lärmimmission sind. |
| Lärmindex | Für den langfristigen oder kumulativen Schall ein Maß, das mit dessen Wirkung auf Menschen korreliert (d. h. als Prädiktor dafür angesehen wird); kann neben der Schallstärke zusätzliche Faktoren berücksichtigen (insbesondere die Tageszeit). Ein Beispiel ist der Tag-Abend-Nacht-PegelLDEN. |
| Lärmpegel | Ein Dezibel-Maß für den Schall in einem Maßstab, der dessen Lautheit oder Geräuschhaftigkeit angibt. Für den Umgebungslärm von Flugzeugen werden im Allgemeinen zwei Vergleichsmaßstäbe verwendet: der A-bewertete Schallpegel und der Lärmstörpegel. Dabei wird von unterschiedlichen Bewertungen für unterschiedliche Frequenzen ausgegangen, um der menschlichen Wahrnehmung Rechnung zu tragen. |
| Lärmmaß | Ausdruck zur Darstellung der Menge an Lärm, die an einer Empfängerposition in Form eines Einzelereignisses oder über längere Zeit akkumulierten Lärms auftritt. Üblicherweise werden zwei Maße für den Einzelereignislärm verwendet: der während des Ereignisses erreichtehöchste Pegel oder dessenLärmexpositionspegel, ein Maß der gesamten Schallenergie, bestimmt durch Zeitintegration. |
| Lärm-Leistung-Abstand- (NPD)-Beziehungen/-Daten | Lärmereignispegel, tabellarisiert als Funktion des Abstands unter einem Flugzeug im stationären Horizontalflug mit einer Bezugsgeschwindigkeit in einer Referenzatmosphäre, für jeweils eine bestimmte Anzahl von ->Triebwerksleistungseinstellungen. Mit den Daten wird dem Einfluss der Schalldämpfung aufgrund der Kugelwellenausbreitung (quadratisches Abstandsgesetz) und atmosphärische Dämpfung Rechnung getragen. Der Abstand wird senkrecht zur Flugbahn des Flugzeugs und zur Tragflächenachse bestimmt (d. h. vertikal unter dem Flugzeug bei Flug ohne Schräglage). |
| Lärmbezogener Leistungsparameter | Parameter, der die Vortriebswirkung beschreibt oder angibt, die ein Flugzeugtriebwerk erzeugt, mit dem eine Emission von Schallleistung logischerweise in Verbindung gebracht werden kann; in der Regel definiert als ->korrigierter Nettoschub. Im gesamten Text verkürzt als "Leistung" oder "Leistungseinstellung" bezeichnet. |
| Lärmsignifikanz | Der von einem Flugbahnsegment ausgehende Lärmanteil ist "lärmsignifikant", wenn er den Ereignislärmpegel in nennenswertem Umfang beeinflusst. Die Nichtberücksichtigung von Segmenten, die nicht lärmsignifikant sind, ermöglicht erhebliche Einsparungen bei der elektronischen Verarbeitung |
| Beobachter | ->Empfänger |
| Verfahrensschritte | Vorgabe für das Fliegen eines Profils - die Schritte umfassen auch Änderungen der Geschwindigkeit und/oder der Höhe. |
| Profilpunkt | Höhe des Endpunktes eines Flugbahnsegments - in einer vertikalen Ebene über dem Flugweg |
| Empfänger | Ein Empfänger von Lärm, der aus einer Quelle ankommt; hauptsächlich an einem Punkt auf oder nahe der Bodenoberfläche |
| Referenzatmosphäre | Eine tabellarische Zusammenstellung von Schallabsorptionsraten zur Vereinheitlichung der NPD-Daten (siehe Anlage D). |
| Referenztag | Bestimmte atmosphärische Bedingungen, nach denen die ANP-Daten vereinheitlich werden. |
| Referenzdauer | Ein nomineller Zeitraum, der zur Vereinheitlichung von Messungen des Einzelereignis-Lärmexpositionspegels verwendet wird; im Falle von ->SEL gleich 1 Sekunde. |
| Referenzgeschwindigkeit | Geschwindigkeit über Grund eines Flugzeugs, nach derNPD- ->SEL-Daten normalisiert werden. |
| SEL | ->Lärmexpositionspegel |
| Einzelereignis-Lärmexpositionspegel | Der Schallpegel, den ein Ereignis hätte, wenn seine gesamte Schallenergie einheitlich in einen Standardzeitraum verdichtet würde, der als ->Referenzdauer bekannt ist. |
| Weicher Grund | Eine akustisch "weiche" und in der Regel grasbedeckte Bodenoberfläche, die die meisten Flugplätze umgibt. Akustisch harte, d. h. stark reflektierende Bodenoberflächen sind etwa Beton und Wasser. Die hier beschriebene Methodik für Lärmkonturen gilt für weiche Bodenverhältnisse. |
| Schall | Durch eine Wellenlängsbewegung durch die Luft übertragene Energie, die vom Ohr wahrgenommen wird |
| Schalldämpfung | Die Abnahme der Schallintensität mit der Entfernung entlang eines Ausbreitungsweges. Bei Fluglärm sind die Ursachen die Ausbreitung von Kugelwellen, die Luftabsorption und die ->Dämpfung zur Seite. |
| Lärmexposition | Ein Maß der gesamten Schallenergieimmission über einen bestimmten Zeitraum |
| Lärmexpositionspegel, LAE | (Akronym SEL) Ein in ISO 1996-1 oder ISO 3891 standardisiertes Maß = auf 1 Sekunde bezogener A-bewerteter Einzelereignis-Lärmexpositionspegel |
| Schallintensität | Die Stärke der Schallimmission an einem bestimmten Punkt - verbunden mit Schallenergie (und angegeben durch gemessene Schallpegel) |
| Schallpegel | Ein Maß der Schallenergie, ausgedrückt in Dezibel-Einheiten. Empfangener Schall wird mit oder ohne "Frequenzbewertung" gemessen; mit einer Bewertung gemessene Pegel werden oft als ->Lärmpegel bezeichnet. |
| Teilstrecken-/Gesamtentfernung | Wegstrecke bis zum ersten Ziel eines abfliegenden Flugzeugs; gilt als Kennziffer für das Flugzeuggewicht. |
| Start-of-Roll-Punkt, SOR | Der Punkt auf der Startbahn, an dem ein abfliegendes Flugzeug seinen Start beginnt. Auch bezeichnet als "Lösen der Bremsen" |
| Wahre Fluggeschwindigkeit | Tatsächliche Geschwindigkeit eines Flugzeugs bezogen auf die umgebende Luft (= Geschwindigkeit über Grund bei Windstille) |
| Gewichteter äquivalenter Schallpegel, Leq,W | Eine modifizierte Version von Leq, bei der dem Schall, der zu unterschiedlichen Tageszeiten auftritt, unterschiedliche Gewichte zugeordnet werden (in der Regel für Tag, Abend und Nacht) |
Symbole
| d | Kürzester Abstand vom Beobachtungspunkt zu einem Flugbahnsegment |
| dp | Senkrechter Abstand vom Beobachtungspunkt zu einer Flugbahn (Schrägentfernung oder schräger Abstand) |
| dλ | Skalierter Abstand |
| Fn | Tatsächlicher Nettoschub pro Triebwerk |
| Fn/δ | Korrigierter Nettoschub je Triebwerk |
| h | Flughöhe (über NN) |
| L | Ereignis-Lärmpegel (Größe nicht definiert) |
| L(t) | Schallpegel zum Zeitpunkt t (Größe nicht definiert) |
| LA, LA(t) | A-bewerteter Schalldruckpegel (zum Zeitpunkt t), gemessen bei Anzeigegeschwindigkeit "langsam" am Messgerät |
| LAE | Lärmexpositionspegel (SEL) |
| LAmax | Höchstwert von LA(t) während eines Ereignisses |
| LE | Einzelereignis-Lärmexpositionspegel |
| LE∞ | Aus der NPD-Datenbank ermittelter Einzelereignis-Lärmexpositionspegel |
| LEPN | Lärmstörpegel |
| Leq | Äquivalenter (Dauer-)Schallpegel |
| Lmax | Höchstwert von L(t) während eines Ereignisses |
| Lmax,seg | Von einem Segment erzeugter Maximalpegel |
| Senkrechter Abstand von einem Beobachtungspunkt zum Flugweg | |
| lg | Logarithmus zur Basis 10 |
| N | Anzahl der Segmente oder Teilsegmente |
| NAT | Anzahl der Ereignisse mit Lmax oberhalb eines festgelegten Schwellenwertes |
| P | Leistungsparameter in NPD-Variabler L(P,d) |
| Pseg | Für ein bestimmtes Segment maßgebender Leistungsparameter |
| q | Abstand vom Beginn eines Segments zum Punkt des kleinsten Vorbeiflugabstands |
| R | Kurvenradius |
| S | Standardabweichung |
| s | Abstand entlang dem Flugweg |
| sRWY | Länge der Start- und Landebahn |
| t | Zeit, Zeitpunkt |
| te | Effektive Dauer eines Einzelschallereignisses |
| t0 | Referenzzeit für integrierten Schallpegel |
| V | Geschwindigkeit über Grund |
| Vseg | Äquivalente Geschwindigkeit über Grund für ein bestimmtes Segment |
| Vref | Referenzgeschwindigkeit über Grund, für die NPD-Daten definiert sind |
| x,y,z | Lokale Koordinaten |
| x',y',z' | Flugzeugkoordinaten |
| XARP,YARP,ZARP | Position des Flugplatzbezugspunkts in geografischen Koordinaten |
| z | Höhe des Luftfahrzeugs über Bezugsebene/Flugplatzbezugspunkt |
| α | Parameter für die Berechnung der Korrektur aufgrund des endlichen Segments ΔF |
| β | Höhenwinkel des Flugzeugs zur Bezugsebene |
| ε | Flugzeug-Querneigungswinkel |
| γ | Steig-/Sinkflugwinkel |
| Φ | Depressionswinkel (Parameter der seitlichen Richtwirkung) |
| λ | Gesamtlänge eines Segments |
| ψ | Winkel zwischen der Richtung der Flugbewegung und der Richtung zum Beobachter |
| ξ | Steuerkurs des Flugzeugs, gemessen im Uhrzeigersinn ausgehend von Magnetisch-Nord |
| Λ(β, |
Luft-Boden-Dämpfung zur Seite |
| Λ(β) | Luft-Boden-Dämpfung zur Seite bei großer Reichweite |
| Γ( |
Abstandsfaktor bei der Dämpfung zur Seite |
| Δ | Änderung des Wertes einer Größe oder Korrektur (je nach Angabe im Text) |
| ΔF | Korrektur aufgrund des endlichen Segments |
| ΔI | Korrektur aufgrund der Triebwerksanbringung |
| Δi | Bewertung für i-te Tageszeit, dB |
| Δrev | Umkehrschub |
| ΔSOR | Korrektur am Start-of-Roll-Punkt |
| ΔV | Dauerkorrektur (Geschwindigkeit) |
Tiefgestellte Indizes
| 1, 2 | Tiefgestellte Indizes zur Kennzeichnung der Anfangs- und Endwerte eines Intervalls oder Segments |
| E | Exposition |
| i | Summationsindex für Flugzeugmuster/-kategorie |
| j | Summationsindex für Flugweg/Teilflugweg |
| k | Summationsindex für Segment |
| max | Höchstwert |
| ref | Bezugswert |
| seg | Spezifischer Wert für ein Segment |
| SOR | Bezogen auf Start-of-Roll-Punkt |
| TO | Start (Take-Off) |
2.6.2. Qualitätsrahmen
Genauigkeit der Eingangswerte
Alle Eingangswerte, die den Emissionspegel einer Quelle beeinflussen, sind mit mindestens der Genauigkeit zu bestimmen, die einer Unsicherheit von ±2 dB (A) im Emissionspegel der Quelle entspricht (wobei alle anderen Parameter unverändert bleiben).
Nutzung von Standardwerten
Bei der Anwendung des Verfahrens müssen die Eingangsdaten der tatsächlichen Nutzung entsprechen. Generell dürfen keine Standardeingangswerte oder -annahmen zugrunde gelegt werden. Insbesondere müssen aus Radardaten abgeleitete Flugbahnen verwendet werden, wann immer sie verfügbar und von ausreichender Qualität sind. Standardeingangswerte und -annahmen werden akzeptiert, wenn beispielsweise anstelle von Radardaten abgeleiteter Flugbahnen modellierte Flugrouten zugrunde gelegt werden sollen, weil die Erhebung realer Daten mit unverhältnismäßig hohen Kosten verbunden wäre.
Qualität der für die Berechnungen verwendeten Software
Die Konformität der zur Durchführung der Berechnungen verwendeten Software mit den Verfahren gemäß diesem Anhang ist dadurch nachzuweisen, dass die Ergebnisse anhand von Testfällen bestätigt werden.
2.7. Fluglärm
2.7.1. Ziel und Anwendungsbereich des Dokuments
Konturenkarten zeigen die Ausdehnung und den Umfang der Fluglärmauswirkungen in der Umgebung von Flughäfen, wobei die Auswirkungen durch die Werte eines angegebenen Lärmmaßes bzw. -index ausgewiesen werden. Eine Kontur ist eine Linie, entlang der der Indexwert konstant ist. Der Indexwert aggregiert in gewisser Weise sämtliche einzelnen Fluglärmereignisse, die in einem bestimmten, normalerweise in Tagen oder Monaten gemessenen Zeitraum auftreten.
Der Lärm an Punkten am Boden aufgrund von an- und abfliegenden Luftfahrzeugen eines nahe gelegenen Flugplatzes hängt von vielen Faktoren ab. Die wichtigsten davon sind Flugzeug- und Triebwerksmuster, die Verfahren für Schub-, Landeklappen- und Geschwindigkeitssteuerung an Bord der jeweiligen Flugzeuge, die Abstände zwischen den betreffenden Punkten und den verschiedenen Flugbahnen sowie topografie und Wetter vor Ort. Im Flughafenbetrieb sind im Allgemeinen verschiedene Flugzeugmuster, verschiedene Flugverfahren sowie die verschiedensten Betriebsgewichte vertreten.
Konturen werden durch mathematische Berechnung der Flächen von lokalen Lärmindexwerten generiert. Im vorliegenden Dokument wird ausführlich erläutert, wie die Lärmereignispegel einzelner Flugzeuge an einem Beobachtungspunkt jeweils für einen bestimmten Flug oder eine bestimmte Flugart zu berechnen sind, die anschließend auf bestimmte Weise gemittelt bzw.akkumuliert werden, so dass sich Indexwerte an diesem Punkt ergeben. Die Generierung der erforderlichen Fläche von Indexwerten erfolgt lediglich durch Wiederholung der Berechnungen für verschiedene Flugbewegungen, wobei durch Ausschluss von "nicht lärmerheblichen" Ereignissen (d. h. Ereignisse, die nicht wesentlich zum Gesamtwert beitragen) größtmögliche Effizienz zu sichern ist.
Wenn lärmerzeugende Tätigkeiten im Zusammenhang mit dem Flughafenbetrieb nicht wesentlich zur Gesamtexposition der Bevölkerung gegenüber Fluglärm und entsprechenden Lärmkonturen beitragen, können sie ausgenommen werden. Zu diesen Tätigkeiten gehören: Hubschrauberflüge, Rollverkehr, Triebwerksprobeläufe sowie der Einsatz von Hilfsenergieaggregaten. Das bedeutet allerdings nicht, dass deren Auswirkungen unerheblich sind, und wenn diese Umstände eintreten, kann eine Bewertung der Quellen gemäß Abschnitt 2.7.21 und 2.7.22 durchgeführt werden.
2.7.2. Überblick über das Dokument
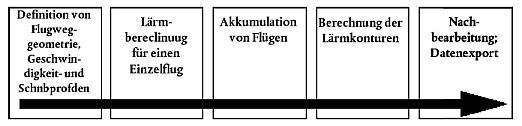
Der Prozess der Lärmkonturengenerierung ist in Abbildung 2.7.a dargestellt. Die Erzeugung von Konturen erfolgt für verschiedene Zwecke, nach denen sich die Anforderungen für Quellen und für die Aufbereitung von Eingabedaten richten. Konturen, die die Lärmimmission in der Vergangenheit darstellen, könnten aus tatsächlichen Flugbetriebsaufzeichnungen - Flugbewegungen, Gewicht, mit Radar erfasste Flugbahnen usw. - generiert werden. Konturen für künftige Planungen beruhen notwendigerweise mehr auf Prognosen des Verkehrs und der Flugwege sowie der Leistungs- und Lärmwerte künftiger Flugzeuge.
Abbildung 2.7.a Der Prozess der Lärmkonturengenerierung
Unabhängig von der Quelle der Flugdaten wird jede Flugbewegung, jeder Anflug und jeder Abflug durch eine bestimmte Flugbahngeometrie und die Lärmemission des Luftfahrzeugs entlang dieser Bahn bestimmt (Flugbewegungen, die lärm- und flugwegmäßig im Wesentlichen gleich sind, werden durch einfache Multiplikation aufgenommen). Die Lärmemission hängt von den Eigenschaften des Flugzeugs ab - hauptsächlich von der Triebwerksleistung. Die empfohlene Methodik beinhaltet eine Unterteilung der Flugbahn in Segmente. In den Abschnitten 2.7.3 bis 2.7.6 werden die Elemente der Methodik vorgestellt, und es wird der Grundsatz der Segmentierung erläutert, auf dem sie beruht: Der beobachtete Ereignispegel ist eine Aggregation aller "lärmerheblichen" Segmente der Flugbahn, die sich jeweils unabhängig voneinander berechnen lassen. Die Abschnitte 2.7.3 bis 2.7.6 umreißen zudem die Anforderungen an die Eingabedaten für die Erstellung einer bestimmten Lärmkonturenmenge. Detaillierte Spezifikationen für die benötigten Betriebsdaten sind in Anlage A aufgeführt.
Wie die Flugbahnsegmente aus vorbehandelten Eingabedaten berechnet werden, wird in den Abschnitten 2.7.7 bis 2.7.13 dargelegt. Dazu gehören Anwendungen der Flugleistungsanalyse, für die entsprechende Gleichungen in Anlage B aufgeführt sind. Die Flugbahnen weisen eine außerordentlich große Unterschiedlichkeit auf, d. h. Flugzeuge auf einer Route bewegen sich aufgrund der Wirkungen unterschiedlicher atmosphärischer Bedingungen, Fluggewichte und Betriebsverfahren, Fluglotsenanweisungen usw. in einem breiteren Flugkorridor. Dem wird Rechnung getragen, indem die einzelnen Flugbahnen statistisch beschrieben werden, und zwar als zentrale bzw."Kernbahn", die sich in Begleitung mehrerer Streubahnen befindet. Auch dies wird in den Abschnitten 2.7.7 bis 2.7.13 unter Bezugnahme auf zusätzliche Informationen in Anlage C erläutert.
In den Abschnitten 2.7.14 bis 2.7.19 werden die Schritte aufgeführt, die bei der Berechnung des Schallpegels eines Einzelereignisses - des Lärms, der an einem Punkt am Boden durch eine Flugbewegung erzeugt wird - zu befolgen sind. Anlage D hat die Neuberechnung von NPD-Daten für Nicht-Referenz-Bedingungen zum Gegenstand. Anlage E erläutert die akustische Dipolquelle, die im Modell zur Bestimmung der Schallabstrahlung von Flugbahnsegmenten finiter Länge verwendet wird.
Anwendungen der in den Kapiteln 3 und 4 beschriebenen Modellierungsverhältnisse verlangen neben den entsprechenden Flugbahnen geeignete Lärm- und Leistungsangaben für die betreffenden Luftfahrzeuge.
Den Kern der Berechnung bildet die Bestimmung des Ereignispegels für eine einzelne Flugbewegung an einem einzelnen Beobachtungspunkt. Sie ist für alle Flugbewegungen an jedem Punkt eines vorgeschriebenen Punktfeldes zu wiederholen, das sich über die erwartete Ausdehnung der verlangten Lärmkonturen erstreckt. An jedem Punkt werden die Ereignispegel so aggregiert oder gemittelt, dass sich ein "kumulativer Pegel" oder ein Lärmindexwert ergibt. Dieser Teil des Prozesses wird in den Abschnitten 2.7.20 und 2.7.23 bis 2.7.25 beschrieben.
In den Abschnitten 2.7.26 bis 2.7.28 werden die Optionen und Anforderungen für die Anpassung von Lärmkonturen an Felder von Lärmindexwerten zusammengefasst. Sie enthalten Hinweise zur Konturengenerierung und -nachbearbeitung.
2.7.3. Das Konzept der Segmentierung
Für jedes konkrete Luftfahrzeug enthält die Datenbank NPD-Basisbeziehungen (Noise-Power-Distance, Lärm- Leistung-Abstand). Darin werden für einen stationären Geradeausflug bei einer Bezugsgeschwindigkeit unter ausgewiesenenatmosphärischen Bezugsbedingungen sowie in einer ausgewiesenen Flugkonfiguration die empfangenen Schallereignispegel (sowohl Maximalpegel als auch zeitintegrierte Pegel) direkt unterhalb des Luftfahrzeugs 3 als Funktion des Abstands bestimmt. Zu Lärmmodellierungszwecken wird die überaus wichtige Antriebsleistung durch einenlärmbezogenen Leistungsparameter dargestellt; im Allgemeinen wird derkorrigierte Nettoschub als Parameter verwendet. Der Datenbank entnommene Basisereignispegel werden korrigiert, um erstens Unterschiede zwischen tatsächlichen (d. h. modellierten) und atmosphärischen Referenzbedingungen sowie (im Falle von Lärmexpositionspegeln) der Flugzeuggeschwindigkeit und zweitens (bei nicht direkt unterhalb des Luftfahrzeugs gelegenen Immissionspunkten) Unterschiede zwischen nach unten und seitwärts abgestrahltem Lärm zu berücksichtigen. Der letztgenannte Unterschied geht auf dielaterale Richtcharakteristik (Triebwerksanbringungseffekte) und dieseitliche Dämpfung zurück. Die auf diese Weise korrigierten Pegel gelten jedoch weiterhin nur für den Gesamtschallpegel des Luftfahrzeugs im stationären Horizontalflug.
Segmentierung ist der Prozess, mit dem das empfohlene Lärmkonturenmodell die NPD- und Lateraldaten für die unendliche Flugbahn so anpasst, dass das einen Empfänger von einer nicht gleichförmigen Flugbahn erreichende Geräusch berechnet wird, d. h. einer Flugbahn, entlang derer die Flugkonfiguration des Luftfahrzeugs variiert. Zum Zwecke der Berechnung des Ereignisschallpegels einer Flugbewegung wird die Flugbahn durch eine Reihe zusammenhängender geradliniger Segmente dargestellt, die sich jeweils als endlicher Teil einer unendlichen Bahn betrachten lassen, für die ein NPD und die lateralen Korrekturen bekannt sind. Der Maximalpegel des Ereignisses ist nichts weiter als der höchste Wert der Einzelsegmentpegel. Die Berechnung des zeitintegrierten Pegels des gesamten Schallereignisses erfolgt durch Addition des Schalls, der von einer ausreichenden Zahl von Segmenten, d. h. von jenen, die einen wesentlichen Beitrag zum Gesamtschallereignis leisten, empfangen wird.
Die Methode der Schätzung, wie viel Lärm ein endliches Segment zum integrierten Ereignispegel beiträgt, ist rein empirisch. DieEnergiefraktion F - der als Anteil am gesamten unendlichen Flugbahnschall ausgedrückte Segmentschall - wird durch einen relativ einfachen Ausdruck beschrieben, der die longitudinale Richtcharakteristik von Fluglärm und die "Sicht" des Empfängers auf das Segment berücksichtigt. Ein Grund dafür, dass eine einfache empirische Methode im Allgemeinen ausreichend ist, besteht darin, dass in der Regel der Großteil des Lärms vom nächstgelegenen, meist angrenzenden Segment kommt, für das der Punkt mit der kürzesten Entfernung zum Empfänger (der kürzeste Vorbeiflugabstand) innerhalb des Segments (und nicht an einem seiner Enden) liegt. Das bedeutet, dass Schätzungen des Schalls von nicht angrenzenden Segmenten zunehmend angenähert sein können, wenn sie sich weiter vom Empfänger entfernen, ohne dass die Genauigkeit signifikant beeinträchtigt wird.
2.7.4. Flugbahnen: Strecken und Profile
Im Modellierungskontext ist eine Flugbahn (Trajektorie) die vollständige Beschreibung der Bewegung des Luftfahrzeugs in Raum und Zeit 4. Zusammen mit dem Triebwerksschub (oder einem anderen lärmbezogenen Leistungsparameter) sind das die Informationen, die zur Berechnung des erzeugten Lärms benötigt werden. Der Flugweg ist die vertikale Projektion der Flugbahn auf eine ebene Bodenfläche. In Kombination mit dem vertikalenFlugprofil ergibt sich daraus die dreidimensionale Flugbahn. Für die Segmentierung ist es notwendig, dass die Flugbahn jeder Flugbewegung durch eine Reihe von zusammenhängenden geraden Segmenten beschrieben wird. Wie die Segmentierung erfolgt, ist bedingt durch die erforderliche Abstimmung von Genauigkeit und Effizienz, d. h. es ist notwendig, die tatsächliche gekrümmte Flugbahn nahe genug zu approximieren und zugleich die Rechenbelastung und die Datenanforderungen zu minimieren. Jedes Segment muss durch die geometrischen Koordinaten seiner Endpunkte sowie die entsprechenden Geschwindigkeits- und Triebwerksleistungsparameter des Flugzeugs (von denen die Lärmemission abhängt) definiert werden. Flugbahnen und Triebwerksleistung lassen sich auf verschiedene Weise bestimmen, vor allem mit (a) der Synthese einer Reihe von Verfahrensschritten sowie (b) der Analyse der gemessenen Flugprofildaten.
Für dieSynthese der Flugbahn (a) bedarf es Kenntnis (oder Annahmen) des Kurses über Grund und seiner lateralen Streuung, des Fluggewichts, der Geschwindigkeits-, Landeklappen- und Schubsteuerungsverfahren, der Flughafenhöhe, des Windes und der Lufttemperatur. Gleichungen zur Berechnung des Flugprofils anhand der erforderlichen Antriebs- und aerodynamischen Parameter sind in Anlage B aufgeführt. Jede Gleichung enthält Koeffizienten (und/oder Konstanten), die auf empirischen Daten für jedes spezifische Luftfahrzeugmuster basieren. Die Gleichungen der aerodynamischen Leistung in Anlage B erlauben die Prüfung einer angemessenen Kombination von Flugzeugbetriebsgewicht und Flugverfahren, einschließlich Betrieb mit verschiedenen Bruttostartgewichten.
DieAnalyse der gemessenen Daten (b), z.B. von Flugdatenschreibern, Radar- oder sonstigen Flugverfolgungssystemen beinhaltet ein "Reverse Engineering", also praktisch eine Umkehr des Syntheseprozesses (a). Statt einer Schätzung des Flugzeug- und Triebwerkszustands an den Enden der Flugsegmente durch Integration der Effekte der auf die Flugzeugzelle wirkenden aerodynamischen und Schubkräfte, werden die Kräfte durch eine Ableitung der Änderungen von Höhe und Geschwindigkeit der Zelle geschätzt. Verfahren für die Verarbeitung der Flugbahninformationen werden in Abschnitt 2.7.12 beschrieben.
Bei einer Lärmmodellierungsanwendung könnte jeder Einzelflug theoretisch eigenständig dargestellt werden; dies würde eine genaue Berücksichtigung der räumlichen Streuung der Flugbahnen gewährleisten, was von großer Bedeutung sein kann. Um jedoch die Datenaufbereitung und die Computerzeit innerhalb vertretbarer Grenzen zu halten, ist es üblich, Flugbahnstreubereiche durch eine kleine Zahl von seitlich versetzten "Unterstrecken" darzustellen. (Die vertikale Streuung ist normalerweise durch eine Berücksichtigung der Wirkungen unterschiedlicher Fluggewichte auf die Höhenprofile zufriedenstellend repräsentiert.)
2.7.5. Lärm- und Leistungsangaben
Die in Anlage I aufgeführte ANP-Datenbank deckt die meisten vorhandenen Luftfahrzeugmuster ab. Muster und Varianten, für die derzeit keine Daten verzeichnet sind, lassen sich am besten durch Daten für verzeichnete andere, normalerweise ähnliche Luftfahrzeuge darstellen.
Die ANP-Datenbank enthält vorgegebene "Verfahrensschritte", die den Aufbau von Flugprofilen für mindestens ein übliches lärmminderndes Abflugverfahren ermöglichen. Neuere Datenbankeinträge erfassen zwei unterschiedliche lärmmindernde Abflugverfahren.
2.7.6. Flughafen- und Flugbetrieb
Fallspezifische Daten, aus denen die Lärmkonturen für ein bestimmtes Flughafenszenario berechnet werden, enthalten Folgendes:
Allgemeine Flughafendaten
Start-/Landebahndaten
Für jede Start-/Landebahn:
Flugwegdaten
Projizierte Flugstrecken (Flugweg) werden durch eine Reihe von Koordinaten in der Bezugsebene beschrieben. Die Quelle der Streckendaten hängt davon ab, ob einschlägige Radardaten verfügbar sind oder nicht. Sind sie verfügbar, werden durch statistische Analyse der Daten eine zuverlässige Kernstrecke (backbone track) und geeignete damit zusammenhängende (verteilte) Unterstrecken ermittelt. Sind sie nicht verfügbar, werden die Kernstrecken in der Regel aus geeigneten Verfahrensinformationen aufgebaut, z.B. unter Verwendung von Standard-Instrumentenabflugverfahren aus Luftfahrthandbüchern. Diese konventionelle Beschreibung enthält die folgenden Informationen:
Diese Informationen sind das notwendige Minimum zur Bestimmung der Kernstrecke. Gemittelte Schallpegel, die aufgrund der Annahme berechnet werden, dass Luftfahrzeuge den nominalen Routen genau folgen, können jedoch anfällig gegenüber lokalisierten Fehlern von mehreren Dezibel sein. Deshalb ist die laterale Streuung darzustellen, wobei die folgenden zusätzlichen Informationen benötigt werden:
Flugverkehrsdaten
Flugverkehrsdaten sind
Bei den meisten Lärmdeskriptoren ist es erforderlich, dass die Ereignisse (d. h. Flugbewegungen) als mittlere tägliche Werte zu bestimmten Tageszeiten (z.B. Tag, Abend und Nacht) definiert werden - siehe Abschnitte 2.7.23 bis 2.7.25.
topografische Daten
Das Gelände um die meisten Flughäfen herum ist relativ flach. Allerdings ist dies nicht immer der Fall, so dass mitunter Abweichungen in der Geländeerhöhung im Verhältnis zur Flughafenbezugshöhe berücksichtigt werden müssen. Die Wirkung einer Geländeerhöhung kann in der Nähe von Anflugstrecken, in denen sich das Flugzeug in relativ niedriger Höhe bewegt, besonders wichtig sein.
Geländeerhöhungsdaten werden in der Regel als Satz von (x-, y-, z-)Koordinaten für ein rechteckiges Gitter mit bestimmter Maschenweite bereitgestellt. Dabei werden sich die Parameter des Höhengitters wahrscheinlich von den Parametern des für die Lärmberechnung genutzten Gitters unterscheiden. In diesem Fall können die geeigneten z-Koordinaten im letztgenannten Gitter mittels linearer Interpolation geschätzt werden.
Eine umfassende Analyse der Wirkungen von ausgesprochen unebenem Gelände auf die Schallausbreitung ist komplex und geht über den Anwendungsbereich dieser Methode hinaus. Mäßige Unebenheiten lassen sich durch die Annahme "pseudoebenen" Bodens berücksichtigen, d. h. einfach durch Anhebung oder Absenkung der flachen Bezugsebene auf die lokale Geländeerhöhung (bezogen auf die Bezugsebene) an jedem Empfangspunkt (siehe Abschnitt 2.7.4).
Bezugsbedingungen
Die internationalen Lärm- und Leistungsangaben (ANP) für Flugzeuge werden auf Standardbezugsbedingungen normalisiert, die für Flughafenlärmstudien vielfach verwendet werden (siehe Anlage D).
Bezugsbedingungen für NPD-Daten
Standardisierte Flugzeugschallmessungen erfolgen 1,2 m über der Erdoberfläche. Dies braucht jedoch nicht besonders berücksichtigt werden, da für Modellierungszwecke angenommen werden kann, dass die Ereignispegel gegenüber der Empfängerhöhe relativ unempfindlich sind 6.
Aus Vergleichen abgeschätzter und gemessener Flughafenlärmpegel geht hervor, dass NPD-Daten als anwendbar angenommen werden können, wenn die mittleren bodennahen Bedingungen innerhalb des folgenden Rahmens liegen:
Es wird davon ausgegangen, dass dieser Rahmen die Bedingungen an den meisten großen Flughäfen der Welt einschließt. Anlage D enthält eine Methode zur Umrechnung der NPD-Daten auf durchschnittliche lokale Bedingungen, die nicht abgedeckt sind, doch wird im Extremfall empfohlen, Auskunft bei den entsprechenden Flugzeugherstellern einzuholen.
Bezugsbedingungen für Aerodynamik- und Triebwerksdaten
Obgleich die ANP-Aerodynamik- und -Triebwerksdaten auf diesen Bedingungen basieren, können sie gemäß Tabelle für Nichtbezugspistenhöhen und mittlere Lufttemperaturen in ECAC-Staaten verwendet werden, ohne die Genauigkeit der berechneten Konturen des kumulativen mittleren Schallpegels wesentlich zu beeinträchtigen (siehe Anlage B).
In den Tabellen der ANP-Datenbank sind die aerodynamischen Daten für das in Ziffer 3 und 4 genannte Bruttostart- und -landegewicht aufgeführt. Obgleich die aerodynamischen Daten selbst bei kumulativen Lärmberechnungen nicht um andere Bruttogewichte korrigiert zu werden braucht, muss die Berechnung der Start- und Steigflugprofile unter Verwendung der in Anlage B beschriebenen Verfahren auf dem geeigneten operativen Bruttostartgewicht basieren.
2.7.7. Beschreibung der Flugbahn
Die Erstellung des Lärmmodells erfordert es, dass jede Flugbewegung durch ihre dreidimensionale Flugbahn und die dabei eingesetzte variable Triebwerksleistung und Geschwindigkeit beschrieben wird. In der Regel repräsentiert eine modellierte Flugbewegung eine Teilmenge des gesamten Flughafenverkehrs, z.B. eine Anzahl (angenommener) identischer Flugbewegungen mit dem gleichen Luftfahrzeugmuster, Gewicht und Betriebsverfahren auf einem einzigen Flugweg. Dieser kann jedoch selbst zu der Vielzahl gestreuter "Unterstrecken" gehören, die zur Modellierung dessen verwendet wird, was bei einer vorgegebenen Route als wahrer Flugkorridor bezeichnet werden kann. Dieser Flugkorridor, die Vertikalprofile und die Flugzeugbetriebsparameter werden aus den eingegebenen Szenariodaten zusammen mit den Flugzeugdaten aus der ANP-Datenbank ermittelt.
Die NPD-Daten (in der ANP-Datenbank) definieren Lärm von Flugzeugen, die sich auf idealisierten horizontalen Flugbahnen unendlicher Länge bei konstanter Geschwindigkeit und Triebwerksleistung bewegen. Zur Anpassung dieser Daten an auf Flugplätzen üblichen Flugbahnen, die durch häufige Änderungen der Antriebsleistung und der Geschwindigkeit gekennzeichnet sind, wird jede Flugbahn in endliche geradlinige Segmente unterteilt, deren Beiträge zum auftretenden Lärm anschließend am Beobachtungspunkt addiert werden.
2.7.8. Verhältnis zwischen Flugbahn und Flugkonfiguration
Die dreidimensionale Flugbahn einer Flugbewegung bestimmt die geometrischen Aspekte der Schallabstrahlung und -ausbreitung zwischen Flugzeug und Beobachter. Bei einem bestimmten Flugzeuggewicht und unter bestimmten atmosphärischen Bedingungen wird die Flugbahn vollkommen von der Folge von pilotenseitig (oder autopilotenseitig) ausgelösten Schub-, Klappen- und Höhenänderungen zur Einhaltung von Flugrouten sowie von der Flugverkehrskontrolle vorgegebenen Höhen und Geschwindigkeiten entsprechend den Standardbetriebsverfahren des Luftfahrzeugbetreibers bestimmt. Die Anweisungen und Handlungen unterteilen die Flugbahn in abgegrenzte Phasen, die natürliche Segmente bilden. In der horizontalen Ebene umfassen sie Geradeausflugabschnitte, angegeben als Distanz bis zur nächsten Kurve, sowie Kurvenflüge, definiert durch Kurvenradius und Kursänderung. In der vertikalen Ebene werden die Segmente durch die verstrichene Zeit und/oder die zurückgelegte Entfernung zur Erreichung erforderlicher Änderungen der Vortriebsgeschwindigkeit und/oder Höhe bei vorgegebenen Schubeinstellungen und Klappenstellungen bestimmt. Die entsprechenden vertikalen Koordinaten werden oft alsProfilpunkte bezeichnet.
Bei der Lärmmodellierung werden Flugbahninformationen entweder durch Synthese einer Reihe von Verfahrensschritten (denen der Pilot folgt) oder durchAnalyse von Radardaten - physischen Messungen von tatsächlich geflogenen Flugbahnen generiert. Unabhängig von der verwendeten Methode werden sowohl horizontale als auch vertikale Formen der Flugbahn auf segmentierte Formen reduziert. Die horizontale Gestalt der Flugbahn (d. h. ihre zweidimensionale Projektion auf die Erdoberfläche) ist derFlugweg, definiert durch die Anflug- oder Abflugstreckenführung. Ihre vertikale Gestalt anhand der Profilpunkte und der dazugehörigen Flugparameter Geschwindigkeit, Querneigungswinkel und Schubeinstellung definieren insgesamt dasFlugprofil, das vomFlugverfahren abhängt, das in der Regel vom Luftfahrzeughersteller und/oder vom Betreiber vorgeschrieben wird. Die Flugbahn wird durch Zusammenführen des 2-D-Flugprofils mit dem 2-D-Flugweg konstruiert, so dass sich eine Folge von 3-D-Flugbahnsegmenten ergibt.
Es sei daran erinnert, dass das Profil für eine bestimmte Reihe von Verfahrensschritten vom Flugweg abhängt. So ist z.B. die Steigrate bei gleichem Schub und gleicher Geschwindigkeit im Kurvenflug geringer als im Geradeausflug. Obwohl im vorliegenden Leitfaden erläutert wird, wie diese Abhängigkeit zu berücksichtigen ist, muss festgestellt werden, dass dies in der Regel einen hohen Rechenaufwand erfordert und Benutzer vielleicht lieber von der Annahme ausgehen, dass Flugprofil und Strecke (Flugweg) unabhängig voneinander betrachtet werden können, d. h. dass das Steigflugprofil nicht von Kurvenflügen beeinflusst wird. Allerdings ist es wichtig, die für Kurvenflüge notwendigen Änderungen des Querneigungswinkels zu bestimmen, da sich dies in bedeutendem Maße auf die Richtwirkung der Schallemission auswirkt.
Der von einem Flugbahnsegment bei einem Beobachter ankommende Schall hängt von der Geometrie des Segments bezogen auf den Beobachter und von der Flugkonfiguration ab. Diese stehen jedoch in Wechselwirkung - eine Änderung des einen Faktors bewirkt eine Änderung des anderen, und so muss sichergestellt werden, dass die Konfiguration des Flugzeugs an allen Punkten der Flugbahn mit seiner Bewegung entlang der Bahn im Einklang steht.
Bei der Flugbahnsynthese, d. h. bei der Konstruktion einer Flugbahn aus einer Reihe von "Verfahrensschritten", die die vom Piloten jeweils gewählten Einstellungen für Triebwerksleistung, Klappenstellung sowie Beschleunigung/Steig- und Sinkgeschwindigkeit beschreiben, ist die Fortbewegung zu berechnen. Bei einer Flugbahnanalyse ist es umgekehrt: Die Einstellungen der Triebwerksleistung müssen aus der beobachteten Bewegung des Flugzeugs abgeschätzt werden, wie sie aufgrund von Radardaten oder mitunter in speziellen Studien aus Flugschreiberdaten ermittelt wurden (obwohl im letztgenannten Fall die Triebwerksleistung in der Regel Bestandteil der Daten ist). In beiden Fällen müssen die Koordinaten und Flugparameter an allen Segmentendpunkten in die Lärmberechnung einfließen.
In Anlage B finden sich die Gleichungen, mit denen die auf ein Flugzeug wirkenden Kräfte und seine Bewegung in Beziehung gesetzt werden; außerdem wird darin erläutert, wie sie gelöst werden, um die Eigenschaften der Segmente, aus denen sich Flugbahnen zusammensetzen, zu bestimmen. Die verschiedenen Arten von Segmenten (und die entsprechenden Abschnitte von Anlage B) lauten:Startlauf (B5),Steigflug mit konstanter Geschwindigkeit (B6),Schubrücknahme (B7),beschleunigender Steilflug und Einfahren der Klappen (B8),beschleunigender Steilflug nach dem Einfahren der Klappen (B9),Sinkflug und Verzögerung (B10)sowie Endanflug (B11).
Zwangsläufig beinhaltet die Modellierung in der Praxis Vereinfachungen in unterschiedlicher Ausprägung, wobei sich die entsprechenden Anforderungen nach der Art der Anwendung, der Bedeutung der Ergebnisse und den verfügbaren Ressourcen richtet. Eine allgemeine vereinfachende Annahme selbst in den aufwändigsten Anwendungen besteht darin, dass bei der Berücksichtigung der Flugstreckenstreuung die Flugprofile und Konfigurationen aller Unterstrecken die gleichen sind wie bei der Kernstrecke. Da mindestens sechs Unterstrecken zu verwenden sind (siehe Abschnitt 2.7.11), verringert sich dadurch bei lediglich minimal reduzierter Genauigkeit der Rechenaufwand immens.
2.7.9. Quellen der Flugbahndaten
Radardaten
Zwar können Flugdatenschreiber qualitativ hochwertige Daten liefern, doch sind diese für Lärmmodellierungszwecke schwer zu beschaffen, so dass Radardaten als am besten zugängliche Informationsquelle für tatsächlich geflogene Flugbahnen an Flughäfen zu betrachten sind 7. Da diese Daten meist aus Flughafenlärm- und Flugbahnbeobachtungssystemen verfügbar sind, werden sie inzwischen zunehmend zur Lärmmodellierung herangezogen.
Beim Sekundärüberwachungsradar wird die Flugbahn eines Flugzeugs als Folge von Positionskoordinaten in Abständen dargestellt, die dem Zeitraum einer Umdrehung des Radarscanners - normalerweise etwa vier Sekunden - entsprechen. Die Position des Flugzeugs über Grund wird in Polarkoordinaten - Entfernung und Azimut - aus dem reflektierten Radarecho berechnet (obwohl das Überwachungssystem diese meist in kartesische Koordinaten umrechnet); die Flughöhe über Grund 8 wird mit dem bordeigenen Höhenmesser gemessen und mit einem mit Radar ausgelösten Transponder an die Flugverkehrskontrolle gesendet. Inhärente Positionsfehler aufgrund von Funkstörungen und begrenzter Datenauflösung sind jedoch erheblich (wenn auch ohne Folgen für die eigentlichen Zwecke der Flugverkehrskontrolle). Wird also die Flugbahn einer bestimmten Flugbewegung benötigt, müssen die Daten mithilfe eines geeigneten Kurvenanpassungsverfahrens geglättet werden. Für Lärmmodellierungszwecke besteht jedoch üblicherweise die Anforderung darin, einen Flugkorridor von Flugbahnen, z.B. alle Flugbewegungen auf einer Route oder lediglich für die eines bestimmten Luftfahrzeugmusters, statistisch zu beschreiben. Hier lassen sich die mit den entsprechenden Statistiken verbundenen Messfehler durch die Mittelung so verringern, dass sie vernachlässigbar sind.
Verfahrensschritte
In vielen Fällen ist eine Modellierung von Flugbahnen anhand von Radardaten nicht möglich, weil die notwendigen Ressourcen nicht verfügbar sind oder es sich um ein zukünftiges Szenario handelt, für das keine relevanten Radardaten vorliegen.
Sind keine Radardaten vorhanden oder ist deren Nutzung nicht sinnvoll, müssen die Flugbahnen auf der Basis von Betriebsleitlinien, z.B. Anweisungen für Flugzeugbesatzungen über Luftfahrthandbücher oder Betriebsanleitungen abgeschätzt werden, die hier alsVerfahrensschritte bezeichnet werden. Hinweise zur Auslegung dieser Materialien sind gegebenenfalls von den Flugsicherungsdienststellen und Luftfahrzeugbetreibern einzuholen.
2.7.10. Koordinatensysteme
Das lokale Koordinatensystem
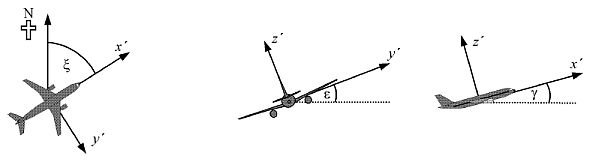
Das lokale Koordinatensystem (x,y,z) ist kartesisch und hat seinen Ursprung (0,0,0) am Flugplatzbezugspunkt (XARP,YARP,ZARP), wobei ZARP die Flugplatzbezugshöhe ist und z = 0 die Bezugsebene (Horizontalebene) bezeichnet, auf der Konturen in der Regel berechnet werden. Der Steuerkurs des Flugzeugs ξ in der xy-Ebene wird im Uhrzeigersinn ausgehend vom magnetischen Norden berechnet (siehe Abbildung 2.7.b). Alle Beobachtungspunkte, das grundlegende Berechnungsgitter und die Lärmkonturpunkte werden in lokalen Koordinaten ausgedrückt 9.
Abbildung 2.7.b Lokales Koordinatensystem (x,y,z) und an den Flugweg gebundene Koordinate s

Das an den Flugweg gebundene Koordinatensystem
Diese Koordinate ist für jeden Flugweg (projizierte Flugstrecke) spezifisch und stellt die entlang der Strecke in Flugrichtung gemessene Entfernung s dar. Bei Abflugstrecken wird s ab Start-of-roll-Punkt, bei Anflugstrecken ab Landeschwelle gemessen. Somit wird s negativ in Bereichen
Flugbetriebsparameter wie Höhe, Geschwindigkeit und Schubeinstellung werden als Funktionen von s ausgedrückt.
Das Flugzeugkoordinatensystem
Das flugzeugfeste kartesische Koordinatensystem (x',y',z') hat seinen Ursprung am tatsächlichen Standort des Flugzeugs. Das Achsensystem wird vom Steigwinkel γ, der Flugrichtung ξ und vom Querneigungswinkel ε definiert (siehe Abbildung 2.7.c).
Abbildung 2.7.c Flugzeugfestes Koordinatensystem (x',y',z')
Berücksichtigung der topografie
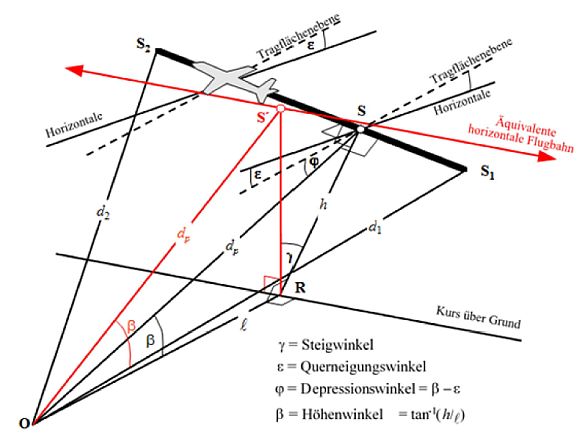
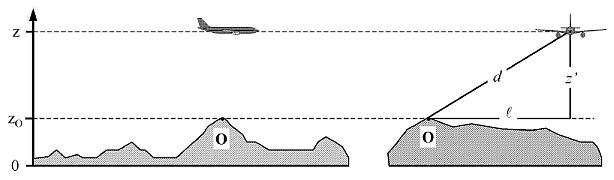
Wenn die topografie zu berücksichtigen ist (siehe Abschnitt 2.7.6), muss bei der Abschätzung der Ausbreitungsentfernung d die Flughöhenkoordinate z durch z' = z - zo ersetzt werden (wobei zo die z-Koordinate des Beobachtungsorts O ist). Die Geometrie zwischen Flugzeug und Beobachter ist in Abbildung 2.7.d dargestellt. Zur Definition von d und![]() siehe Abschnitte 2.7.14 bis 2.7.19 10.
siehe Abschnitte 2.7.14 bis 2.7.19 10.
Abbildung 2.7.d Bodenerhöhung längs (links) und seitlich (rechts) des Kurses über Grund
(Die Bezugsebene z = 0 verläuft durch den Flugplatzbezugspunkt. O ist der Beobachtungsort.)
2.7.11. Projizierte Flugstrecken (Flugweg)
Kernstrecken
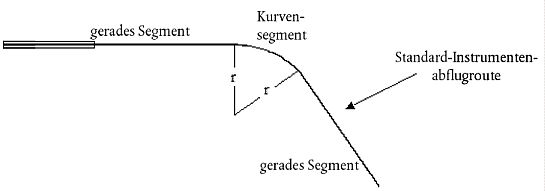
Die Kernstrecke (backbone track) definiert das Zentrum des Flugkorridors, entlang dessen sich ein Flugzeug auf einer bestimmten Streckenführung bewegt.. Für die Zwecke der Fluglärmmodellierung wird sie entweder i) durch reglementierende Betriebsdaten, wie z.B. Anweisungen für Piloten in Luftfahrthandbüchern, oder ii) durch die statistische Analyse von Radardaten gemäß Abschnitt 2.7.9 festgelegt, wenn diese verfügbar und den Erfordernissen der Modellierungsstudie angemessen sind. Die Konstruktion der Strecke anhand von Betriebsanweisungen ist normalerweise recht unkompliziert, da darin eine Folge von Flugabschnitten vorgeschrieben ist, die entweder gerade (nach Länge und Steuerkurs) oder bogenförmig (nach Wenderate und Steuerkursänderung) verlaufen, siehe Abbildung 2.7.e.
Abbildung 2.7.e Geometrie der Flugstrecke mit Kurven und geraden Segmenten
Die Einpassung einer Kernstrecke in Radardaten ist vielschichtiger, weil erstens tatsächliche Kurven mit unterschiedlicher Geschwindigkeit geflogen werden und zweitens der Linienverlauf durch die Datenstreuung überdeckt wird. Wie bereits erläutert, wurden noch keine formalisierten Verfahren entwickelt, und es ist üblich, gerade und gekrümmte Segmente mit den durchschnittlichen Positionen abzugleichen, die aus Querschnitten der mit den Radardaten gewonnenen Flugwege in Intervallen entlang der Route berechnet werden. Es ist davon auszugehen, dass in Zukunft Computeralgorithmen dafür entwickelt werden, doch im Augenblick obliegt dem Modellierer die Entscheidung, wie die verfügbaren Daten bestmöglich zu verwenden sind. Ein maßgeblicher Faktor besteht darin, dass Fluggeschwindigkeit und Kurvenradius den Querneigungswinkel bestimmen, und wie in Abschnitt 2.7.19 zu sehen sein wird, beeinflussen Nichtsymmetrien der Schallabstrahlung rund um die Flugbahn sowie die Position der Flugbahn selbst den Lärm am Boden.
Theoretisch wäre es für einen nahtlosen Übergang vom Geradeausflug zum Kurvenflug mit festem Radius notwendig, sofort den Querneigungswinkel ε anzulegen, was physikalisch unmöglich ist. In Wirklichkeit bedarf es einer endlichen Zeitspanne, bis der Querneigungswinkel den erforderlichen Wert für die Aufrechterhaltung einer vorgegebenen Geschwindigkeit und eines vorgegebenen Kurvenradius r erreicht; in dieser Zeit verkürzt sich der Kurvenradius von unendlich auf r. Zu Modellierungszwecken kann der Radiusübergang unberücksichtigt bleiben und angenommen werden, dass der Querneigungswinkel am Beginn der Kurve stetig von null (oder einem anderen Ausgangswert) auf ε ansteigt und der nächste Wert von ε am Ende der Kurve ist 11.
Streckenstreuung
Wenn möglich sind Definitionen der seitlichen Streuung und der darzustellenden Unterstrecken auf einschlägige bisherige Erfahrungen des zu untersuchenden Flughafens zu gründen, in der Regel mittels einer Analyse von Radardatenproben. Der erste Schritt besteht in der Gruppierung der Daten nach Routen. Die Abflugstrecken sind durch eine erhebliche seitliche Streuung gekennzeichnet, die für eine genaue Modellierung zu berücksichtigen ist. Die Anflugrouten fügen sich in der Regel zu einem sehr engen Flugkorridor in etwa beim Endanflugweg zusammen, sodass es meist ausreicht, alle Anflüge durch eine einzige Strecke darzustellen. Sind jedoch die Anflugkorridore innerhalb der Region der Lärmkonturen breit, müssten sie möglicherweise ebenso wie die Abflugrouten durch Unterstrecken dargestellt werden.
Es ist üblich, die Daten für eine einzelne Route als Muster einer einzigen Grundgesamtheit zu behandeln, dargestellt durch eine Kernstrecke und eine Menge verstreuter Unterstrecken. Ergibt jedoch die Prüfung, dass die Daten verschiedener Flugzeugklassen oder Flüge erheblich voneinander abweichen (z.B. wenn große und kleine Flugzeuge deutlich unterschiedliche Kurvenradien aufweisen), kann eine weitere Unterteilung der Daten in mehrere Flugkorridore wünschenswert sein. Für jeden Flugkorridor wird die seitliche Streckenstreuung als Funktion der Entfernung zum Ursprung ermittelt. Anschließend werden die Flugbewegungen auf der Basis der Verteilungsstatistik in eine Kernstrecke und eine geeignete Zahl verstreuter Unterstrecken aufgeteilt.
Da es normalerweise nicht zweckmäßig ist, die Wirkungen der Streckenstreuung außer Acht zu lassen, ist bei fehlenden Messdaten für Flugkorridore eine nominale Seitenstreuung quer und senkrecht zur Kernstrecke durch eine konventionelle Verteilungsfunktion zu definieren. Berechnete Werte von Lärmindizes werden von der genauen Form der seitlichen Streuung nicht besonders beeinflusst, sodass die Gaußsche Normalverteilung eine adäquate Beschreibung vieler mit Radar gemessener Flugkorridore bietet.
Typischerweise wird eine diskrete Approximation mit sieben Punkten verwendet (d. h. die seitliche Streuung wird durch sechs in gleichem Abstand um die Kernstrecke angeordnete Unterstrecken dargestellt). Der Abstand der Unterstrecken hängt von der Standardabweichung der seitlichen Streuungsfunktion ab.
Bei normal verteilten Strecken mit einer Standardabweichung S befinden sich 98,8 % der Strecken innerhalb eines Korridors mit Grenzen bei ±2,5 x S. In Tabelle 2.7.a sind die Abstände der sechs Unterstrecken sowie der Anteil der Flugbewegungen, die den jeweiligen Unterstrecken zugewiesen sind, aufgeführt. Anlage C enthält Werte für andere Anzahlen von Unterstrecken.
Tabelle 2.7.a Anteil an den Flugbewegungen bei einer Normalverteilungsfunktion mit Standardabweichung S für sieben Unterstrecken (Kernstrecke = Unterstrecke 1)
| Unterstrecke Nummer | Position der Unterstrecke | Anteil an den Flugbewegungen auf der Unterstrecke |
| 7 | - 2,14 x S | 3 % |
| 5 | - 1,43 x S | 11 % |
| 3 | - 0,71 x S | 22 % |
| 1 | 0 | 28 % |
| 2 | 0,71 x S | 22 % |
| 4 | 1,4 3 x S | 11 % |
| 6 | 2,14 x S | 3 % |
Die Standardabweichung S ist eine Funktion der Koordinate s entlang der Kernstrecke. Sie lässt sich - zusammen mit der Beschreibung der Kernstrecke - in dem in Anlage A3 aufgeführten Flugstrecken-Datenblatt angeben. Bei fehlenden Indikatoren für die Standardabweichung - z.B. anhand von Radardaten zur Beschreibung vergleichbarer Flugstrecken - werden die folgenden Werte empfohlen:
Bei Strecken mit Kurven von weniger als 45 Grad:
| S(s) = 0,055 · s - 150 | für 2.700 m ≤ s ≤ 30.000 m | (2.7.1) |
| S(s) = 1.500 | für s> 30.000 m |
Bei Strecken mit Kurven von mehr als 45 Grad:
| S(s) = 0,128 · s - 420 | für 3.300 m ≤ s ≤ 15.000 m | (2.7.2) |
| S(s) = 1.500 m | für s> 15.000 m |
Aus praktischen Gründen wird S(s) zwischen dem Start-of-roll-Punkt und s = 2.700 m bzw. s = 3.300 m je nach Kurvengröße als null angenommen. Routen mit mehr als einer Kurve werden nach Gleichung ( 2.7.2) behandelt. Bei Anflügen kann die seitliche Streuung ab 6.000 m vor dem Aufsetzen vernachlässigt werden.
2.7.12. Flugprofile
Das Flugprofil ist eine Beschreibung der Bewegung des Flugzeugs in der vertikalen Ebene über dem Flugweg in Bezug auf Position, Geschwindigkeit, Querneigungswinkel und Triebwerksleistungseinstellung. Eine der wichtigsten Aufgaben des Modellbenutzers ist die Festlegung von Flugprofilen, die die Anforderungen der Modellierungsanwendung angemessen erfüllen. Sie müssen effizient sein, also ohne übermäßigen Zeit- und Ressourcenaufwand zu erfordern. Um einen hohen Genauigkeitsgrad zu erreichen, müssen die Profile selbstverständlich den jeweiligen Flugzeugbetriebszustand so exakt wie möglich widerspiegeln. Dazu bedarf es zuverlässiger Angaben über die atmosphärischen Bedingungen, die Luftfahrzeugmuster und -varianten, Betriebsgewichte sowie die Betriebsverfahren - die unterschiedlichen Schubeinstellungen und die Klappenstellung sowie den gefundenen Kompromiss zwischen Höhen- und Geschwindigkeitsänderung - alle über den betreffenden Zeitraum/die betreffenden Zeiträume entsprechend gemittelt. Oft stehen derartige detaillierte Informationen nicht zur Verfügung, was aber nicht unbedingt hinderlich ist. Selbst wenn sie vorliegen, muss der Modellierungsverantwortliche nach Augenmaß für ein ausgewogenes Verhältnis zwischen Genauigkeit und Ausführlichkeit der Eingabeinformationen sowie der Erfordernisse und Anwendungsbereiche der daraus zu berechnenden Konturen sorgen.
Die Synthese von Flugprofilen anhand von "Verfahrensschritten" aus der ANP-Datenbank oder von Flugzeugbetreibern wird in Abschnitt 2.7.13 und Anlage B beschrieben. Dieser Prozess - in der Regel der einzige, der dem Modellierer offensteht, wenn keine Radardaten verfügbar sind - ergibt sowohl die Flugbahngeometrie, als auch die entsprechenden Geschwindigkeits- und Schubänderungen. Im Normalfall würde angenommen, dass alle (gleichartigen) Flugzeuge in einem Flugkorridor unabhängig davon, ob sie der Kernstrecke oder den verstreuten Unterstrecken zugewiesen sind, dem gleichen Kernstreckenprofil folgen.
Neben der ANP-Datenbank, die Standardinformationen zu den Verfahrensschritten liefert, sind die Flugzeugbetreiber die beste Quelle für zuverlässige Informationen - zu den von ihnen verwendeten Verfahren und den typischen geflogenen Gewichten. Die wertvollste Quelle für Einzelflüge stellt der Flugdatenschreiber dar, der sämtliche relevante Informationen liefert. Doch selbst wenn derartige Daten verfügbar sind, ist der Aufwand für ihre Aufbereitung enorm hoch. Im Sinne des notwendigen sparsamen Umgangs mit Ressourcen bei der Modellierung besteht daher die normale praktische Lösung darin, fundierte Annahmen zu mittleren Gewichten und Betriebsverfahren anzustellen.
Bei einer Übernahme von in der ANP-Datenbank angegebenenStandard-Verfahrensschritten (diese Schritte werden üblicherweise vermutet, wenn die tatsächlichen Verfahren nicht bekannt sind) ist Vorsicht geboten. Es handelt sich dabei zwar um standardisierte Verfahren, denen vielfach gefolgt wird, die aber vom Betreiber in konkreten Fällen vielleicht nicht angewendet werden. Ein wichtiger Faktor ist die Festlegung des Startschubs (und zuweilen des Steigschubs), der in gewissem Umfang von den jeweiligen Umständen abhängen kann. Insbesondere ist es üblich, den Schub während des Abflugs (gegenüber Volllast) zurückzunehmen, um die Lebensdauer der Triebwerke zu verlängern. Anlage B vermittelt Hinweise zur Darstellung der typischen Praxis; daraus ergeben sich im Allgemeinen realistischere Konturen als bei Annahme von Vollschub. Ist die Startbahn jedoch kurz und/oder ist die durchschnittliche Lufttemperatur hoch, dürfte es realistischer sein, von Vollschub auszugehen.
Eine höhere Genauigkeit bei der Modellierung tatsächlicher Szenarien lässt sich erreichen, wenn die nominalen Informationen durch die Anwendung von Radardaten ergänzt oder ersetzt werden. Flugprofile lassen sich ähnlich wie die seitlichen Kernstrecken anhand von Radardaten bestimmen - allerdings erst nach einer Aufteilung des Verkehrs nach Luftfahrzeugmuster und -variante und mitunter nach Gewicht und Teilstreckenlänge (nicht jedoch nach Streuung) -, so dass sich für jede Untergruppe ein mittleres Höhen- und Geschwindigkeitsprofil gegenüber der zurückgelegten Strecke über Grund ergibt. Beim anschließenden Zusammenfügen mit den Kursen über Grund wird dieses Einheitsprofil dann in der Regel wieder sowohl der Kernstrecke als auch den Unterstrecken zugewiesen.
Ist das Flugzeuggewicht bekannt, kann die Geschwindigkeits- und Schubänderung über eine schrittweise Lösung der Bewegungsgleichungen berechnet werden. Eine vorherige Aufbereitung der Daten ist sinnvoll, um die Effekte von Radarfehlern zu minimieren, aufgrund derer Schätzungen der Beschleunigung unzuverlässig werden können. Der erste Schritt besteht jeweils in einer Neudefinition des Profils durch Einpassung von geradlinigen Segmenten, die die jeweiligen Teilstrecken darstellen. Dabei wird jedes Segment entsprechend klassifiziert, d. h. als Startlauf, Steig- oder Sinkflug mit konstanter Geschwindigkeit, Schubrücknahme oder Beschleunigung/ Verzögerung mit oder ohne Änderung der Klappenstellung. Zu den notwendigen Eingabedaten gehören zudem das Flugzeuggewicht sowie der atmosphärische Zustand.
In Abschnitt 2.7.11 wird darauf hingewiesen, dass die seitliche Streuung von Flugstrecken um die nominale bzw. die Kernstrecke herum besonders zu berücksichtigen ist. Die Radardatenproben sind dadurch gekennzeichnet, dass in der vertikalen Ebene ähnliche Streuungen der Flugbahnen auftreten. Es ist allerdings nicht üblich, die vertikale Streuung als eigenständige Variable zu modellieren. Sie entsteht hauptsächlich aufgrund unterschiedlichen Flugzeuggewichts und unterschiedlicher Betriebsverfahren, die bei der Aufbereitung der Verkehrseingabedaten berücksichtigt werden.
2.7.13. Konstruktion von Flugbahnsegmenten
Jede Flugbahn muss durch eine bestimmte Menge an Segmentkoordinaten (Knotenpunkten) und Flugparametern definiert werden. Als Ausgangspunkt werden die Koordinaten der Flugweg-Segmente bestimmt. Anschließend wird das Flugprofil berechnet, wobei zu beachten ist, dass das Flugprofil für eine gegebene Menge von Verfahrensschritten vom Flugweg abhängig ist. Beispielsweise ist die Steigrate des Flugzeugs bei gleichem Schub und gleicher Geschwindigkeit in Kurven geringer als im Geradeausflug. Abschließend erfolgt die Konstruktion der dreidimensionalen Flugbahnsegmente durch Zusammenführen des zweidimensionalen Flugprofils und des zweidimensionalen Kurses über Grund 12.
Flugweg
Ein Flugweg wird unabhängig davon, ob es sich um die Kernstrecke oder verstreute Unterstrecke handelt, durch eine Reihe von (x,y)-Koordinaten in der Bezugsebene (z.B. anhand von Radarinformationen) oder durch eine Folge von Führungsbefehlen zur Beschreibung gerader Segmente und Kreisbögen (Kurven mit festgelegtem Radius r und Steuerkursänderung Δξ) definiert.
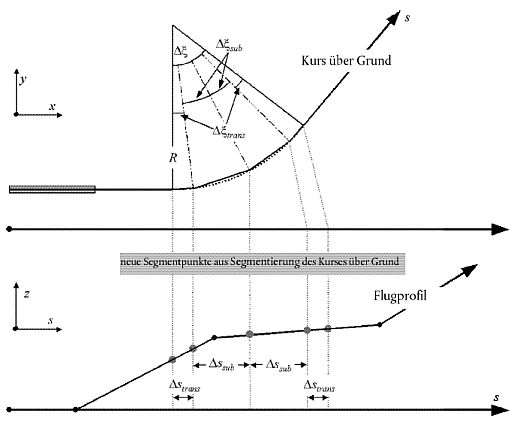
Für die Segmentierungsmodellierung wird ein Bogen durch eine Folge in Teilbögen eingepasster gerader Segmente dargestellt. Obwohl sie in den Flugweg-Segmenten nicht ausdrücklich erscheinen, beeinflusst die Querlage des Flugzeugs beim Kurvenflug ihre Definition. In Anlage B4 wird die Berechnung von Querneigungswinkeln während einer stationären Vollkurve erläutert, doch werden diese Winkel natürlich nicht unverzögert angelegt oder zurückgesetzt. Wie der Übergang zwischen Geradeaus- und Kurvenflug oder zwischen einer Kurve und einer unmittelbar anschließenden Kurve behandelt werden soll, ist nicht vorgeschrieben. In der Regel wirken sich Einzelheiten, die dem Benutzer überlassen bleiben (siehe Abschnitt 2.7.11), nur unwesentlich auf die endgültigen Konturen aus. Es besteht überwiegend die Anforderung, starke Brüche am Ende der Kurve zu vermeiden, was sich beispielsweise problemlos dadurch erreichen lässt, dass kurze Übergangssegmente eingefügt werden, im Laufe derer sich der Querneigungswinkel linear mit der zurückgelegten Strecke verändert. Nur in dem besonderen Fall, dass sich eine bestimmte Kurve wahrscheinlich dominierend auf die endgültigen Konturen auswirken würde, wäre eine realistischere Modellierung der Übergangsdynamik notwendig, so dass ein Querneigungswinkel bestimmten Luftfahrzeugmustern zugeordnet und geeignete Rollwinkelgeschwindigkeiten übernommen werden müssten. Es sei lediglich vermerkt, dass die Endteilbögen Δξtrans in einer Kurve von den Änderungsanforderungen für den Querneigungswinkel bestimmt werden. Der übrige Teil des Bogens mit der Steuerkursänderung Δξ - 2 Δξtrans Grad wird in nsub Teilbögen geteilt, und zwar nach der Gleichung:
| nsub = int(1 + (Δξ - 2 · Δξtrans)/30) | (2.7.3) |
Dabei ist int(x) eine Funktion, die den ganzzahligen Teil von x ergibt. Die Steuerkursänderung Δξsub jedes Teilbogens errechnet sich dann als
| Δξsub = (Δξ - 2 · Δξtrans)/nsub | (2.7.4) |
wobei nsub groß genug sein muss, damit Δξsub ≤ 30 Grad. Die Segmentierung eines Bogens (ohne die abschließenden Übergangsteilsegmente) wird in Abbildung 2.7.f veranschaulicht 13.
Abbildung 2.7.f Konstruktion von Flugbahnsegmenten zur Teilung der Kurve in Segmente der Länge Δs (obere Ansicht in horizontaler Ebene, untere Ansicht in vertikaler Ebene)
Flugprofil
Die Parameter zur Beschreibung jedes Flugprofilsegments am Beginn (Suffix 1) und am Ende (Suffix 2) des Segments lauten:
s1, s2 Entfernung entlang des Kurses über Grund,
z1, z2 Flughöhe über Grund,
V1, V2 Geschwindigkeit über Grund,
P1, P2 lärmbezogener Schubparameter (entspricht dem, für den die NPD-Kurven definiert sind) und
ε1, ε2 Querneigungswinkel.
Zum Aufbau eines Flugprofils aus einer Menge von Verfahrensschritten (Flugbahnsynthese) werden die Segmente aufeinanderfolgend so konstruiert, dass die erforderlichen Bedingungen an den Endpunkten erzielt werden. Dabei werden die Endpunktparameter jedes Segments zu den Anfangspunktparametern des nächsten Segments. Bei jeder Segmentberechnung sind die Parameter am Anfang bekannt; die erforderlichen Bedingungen am Ende werden vom Verfahrensschritt angegeben. Die Schritte selbst sind entweder durch die ANP-Standardschritte oder vom Benutzer festgelegt (z.B. anhand von Flugzeughandbüchern). Bei den Endbedingungen handelt es sich gewöhnlich um Höhe und Geschwindigkeit, und beim Profilaufbau geht es um die Bestimmung der zurückgelegten Strecke unter Erreichung dieser Bedingungen. Die undefinierten Parameter werden über Flugleistungsberechnungen gemäß Anlage B bestimmt.
Verläuft der Flugweg geradeaus, so lassen sich die Profilpunkte und dazugehörigen Flugparameter unabhängig vom Flugweg bestimmen (Querneigungswinkel stets null). Allerdings verläuft der Flugweg selten geradeaus. Meist treten Kurven auf, die zur Erzielung bester Ergebnisse bei der Bestimmung des zweidimensionalen Flugprofils berücksichtigt werden müssen, wenn notwendig durch Aufspaltung von Profilsegmenten an Knotenpunkten des Kurses über Grund zur Einfügung von Querneigungswinkeländerungen. In der Regel ist die Länge des nächsten Segments zu Beginn unbekannt und wird unter Annahme eines unveränderten Querneigungswinkels mit einem Vorläufigkeitswert berechnet. Wird dann festgestellt, dass sich das vorläufige Segment über einen oder mehrere Flugweg-Knotenpunkte erstreckt und der erstes ist, d. h. s1
< 2 < s2, wird das Segment bei s abgeschnitten, und die Parameter dort werden durch Interpolation errechnet (siehe unten). Diese werden zu den Endpunktparametern des aktuellen Segments und zu den Anfangspunktparametern eines neuen Segments, das weiterhin über die gleichen Zielendbedingungen verfügt. Ist kein eingreifender Flugweg-Knotenpunkt vorhanden, wird das vorläufige Segment bestätigt.Sollen die Effekte von Kurven auf das Flugprofil außer Acht gelassen werden, kommt die Geradeausfluglösung mit einem einzigen Segment zur Anwendung, obwohl die Informationen zum Querneigungswinkel für eine spätere Verwendung festgehalten werden.
Unabhängig davon, ob Kurveneffekte vollständig modelliert werden oder nicht, wird eine dreidimensionale Flugbahn jeweils durch Zusammenfügen ihres zweidimensionalen Flugprofils und ihres zweidimensionalen Kurses über Grund generiert. Das Ergebnis ist eine Folge von Koordinatenmengen (x,y,z), die entweder ein Knotenpunkt des segmentierten Kurses über Grund, ein Knotenpunkt des Flugprofils oder beides sind, wobei die Profilpunkte von den entsprechenden Werten der Höhe z, der Geschwindigkeit über Grund V, des Querneigungswinkels ε und der Triebwerksleistung P begleitet werden. Für einen Streckenpunkt (x,y), der zwischen den Endpunkten eines Flugprofilsegments liegt, werden die Flugparameter wie folgt interpoliert:
| z = z1 + ¦ · (z2 - z1) | (2.7.5) |
| (2.7.6) | |
| ε = ε1 + ¦ · (ε2 - ε1) | (2.7.7) |
| (2.7.8) |
wobei
| f = (s - s1)/(s2 - s1) | (2.7.9) |
Es sei darauf hingewiesen, dass bei z und ε eine lineare Änderung mit der Entfernung, bei V und P jedoch eine lineare Änderung mit der Zeit (d. h. konstante Beschleunigung 14) angenommen wird.
Beim Abgleich von Flugprofilsegmenten mit Radardaten (Flugbahnanalyse) werden alle Endpunktentfernungen, Flughöhen über Grund, Geschwindigkeiten und Querneigungswinkel direkt aus den Daten bestimmt; nur die Triebwerkseinstellungen müssen unter Anwendung der Leistungsrechnungen berechnet werden. Da auch die Flugweg- und die Flugprofilkoordinaten entsprechend abgeglichen werden können, ist dies in der Regel recht unkompliziert.
Segmentierung des Startlaufs
Wenn das Flugzeug beim Start zwischen dem Punkt, an dem die Bremsen gelöst werden (Brake Release Point, auch "Start-of-Roll-Punkt" SOR genannt), und dem Abhebepunkt beschleunigt, verändert sich die Geschwindigkeit über eine Strecke von 1.500 bis 2.500 m extrem von null auf 80 bis 100 m/s.
Der Startlauf ist somit in Segmente mit veränderlicher Länge unterteilt, über die sich die Geschwindigkeit des Flugzeugs um ein spezifisches Inkrement ΔV von höchstens 10 m/s (etwa 20 Knoten) ändert. Obwohl sie eigentlich während des Startlaufs veränderlich ist, ist die Annahme einer konstanten Beschleunigung für diesen Zweck ausreichend. In diesem Fall, in der Startphase, ist V1 die Anfangsgeschwindigkeit, V2 die Startgeschwindigkeit, nTO die Nummer des Startsegments und sTO die äquivalente Startstrecke. Für die äquivalente Startstrecke sTO (siehe Anlage B), die Anfangsgeschwindigkeit V1 und die Startgeschwindigkeit V2 beträgt die Anzahl nTO der Segmente für den Startlauf
| nTO = int(1 + (V2 - V1)/10) | (2.7.10) |
Somit ist die Geschwindigkeitsänderung entlang eines Segments
| ΔV = (V2 - V1)/nTO | (2.7.11) |
und die Zeit Δt in jedem Segment (unter Annahme einer konstanten Beschleunigung)
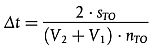 |
(2.7.12) |
Die Länge sTO,k von Segment k (1 ≤ k ≤ nTO) des Startlaufs ist also:
 |
(2.7.13) |
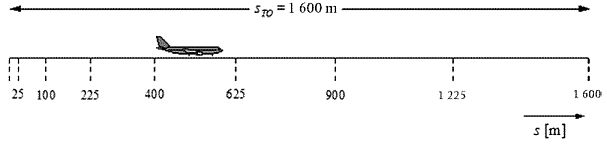
Beispiel:
Bei einer Startstrecke sTO = 1.600 m, V1 = 0 m/s und V2 = 75 m/s ergeben sich nTO = 8 Segmente mit Längen von 25 bis 375 Metern (siehe Abbildung 2.7.g):
Abbildung 2.7.g Segmentierung eines Startlaufs (Beispiel für 8 Segmente)
Analog zu den Geschwindigkeitsänderungen errechnen sich die Schubänderungen eines Flugzeugs über jedes Segment mit einem konstanten Inkrement ΔP als
| ΔP = (PTO - Pinit)/nTO | ( 2.7.14) |
Hierbei bezeichnen PTO und Pinit den jeweiligen Schub am Abhebepunkt bzw. am Start-of-Roll-Punkt.
Mit der Verwendung dieses konstanten Schubinkrements (statt der quadratischen Gleichung 2.7.8) soll Konsistenz mit dem linearen Verhältnis zwischen Schub und Geschwindigkeit bei Strahlflugzeugen hergestellt werden (Gleichung B-1).
Segmentierung des Anfangssteigflugsegments
Im Anfangssteigflugsegment ändert sich die Geometrie sehr rasch insbesondere in Bezug auf Beobachtungspunkte seitlich der Flugstrecke, wo sich derBeta-Winkel beim Steigflug durch dieses Anfangssegment schnell verändert. Vergleiche mit Berechnungen für sehr kleine Segmente zeigen, dass die Verwendung eines einzigen Steigflugsegments eine unzureichende Approximation des Lärms seitlich der Flugstrecke für integrierte Maße zur Folge hat. Die Genauigkeit der Berechnung verbessert sich, wenn das erste Abhebesegment weiter zerlegt wird. Dabei werden die Länge der einzelnen Segmente und ihre Anzahl stark von der Dämpfung zur Seite beeinflusst. Unter Angabe des Ausdrucks der gesamten seitlichen Dämpfung für Flugzeuge mit am Rumpf montierten Triebwerken lässt sich zeigen, dass für eine begrenzende Änderung der Dämpfung zur Seite von 1,5 dB je Teilsegment das Anfangssteigflugsegment auf der Basis der folgenden Menge von Höhenwerten in Teilsegmente zerlegt wird:
z = {18,9, 41,5, 68,3, 102,1, 147,5, 214,9, 334,9, 609,6, 1.289,6} Meter, bzw.
z = {62, 136, 224, 335, 484, 705, 1.099, 2.000, 4.231} Fuß
Die Implementierung der angegebenen Flughöhen über Grund erfolgt, indem ermittelt wird, welche Höhe in der oben angegeben Menge dem Endpunkt des Originalsegments am nächsten liegt. Anschließend werden die tatsächlichen Flughöhen über Grund wie folgt berechnet:
| z'i = z [zi/zN] (i = 1 ... N) | (2.7.15) |
Dabei bezeichnet z die Flughöhe über Grund am Endpunkt des Originalsegments, zi das i-te Element der Menge von Höhenwerten und zN die nächste obere Schranke zur Höhe z. Dieser Prozess führt dazu, dass die Änderung der seitlichen Dämpfung über jedes Teilsegment konstant bleibt und genauere Konturen ergibt, ohne dass sehr kurze Segmente verwendet werden müssen.
Beispiel:
Liegt die Endpunkthöhe des Originalsegments bei z = 304,8 m, dann ist aus der Menge der Höhenwerte 214,9
< 304,8 < 334,9 die z = 304,8 m nächstgelegene obere Schranke z7 = 334,9 m. Die Endpunkthöhen der Teilsegmente werden dann berechnet mit:zi' = 304,8 [zi/334,9] (i = 1..N)
Es wäre also z1' 17,2 m, z2' 37,8 m usw.
Die Geschwindigkeits- und Triebwerksleistungswerte an den eingeschobenen Punkten werden unter Verwendung der Gleichungen ( 2.7.11) bzw. ( 2.7.13) interpoliert.
Segmentierung von Flugsegmenten
Nach der Herleitung der segmentierten Flugbahn nach dem in Abschnitt 2.7.13 beschriebenen Verfahren und der Anwendung der beschriebenen Teilsegmentierung können weitere Segmentierungsanpassungen notwendig sein. Dazu gehören
Wenn benachbarte Punkte weniger als 10 m voneinander entfernt liegen und die dazugehörigen Geschwindigkeits- und Schubwerte gleich sind, ist einer der Punkte zu entfernen.
Bei Flugsegmenten mit erheblicher Geschwindigkeitsänderung entlang eines Segments erfolgt eine Unterteilung wie beim Startlauf, d. h.
| nseg = int(1 + |V2 - V1|/10) | (2.7.16), |
wobei V1 und V2 die Anfangs- bzw. Endgeschwindigkeit des Segments bezeichnen. Die entsprechenden Teilsegmentparameter werden in gleicher Weise wie beim Startlauf unter Verwendung der Gleichungen 2.7.11 bis 2.7.13 berechnet.
Das Landerollen
Obwohl es sich beim Landerollen im Wesentlichen um eine Umkehr des Startlaufs handelt, ist Folgendes besonders zu berücksichtigen:
Im Gegensatz zur Startlaufstrecke, die aus den Flugzeugleistungsparametern hergeleitet wird, ist die Landerollstrecke sstop (d. h. die Strecke vom Aufsetzpunkt bis zu dem Punkt, an dem das Flugzeug die Landebahn verlässt) nicht rein flugzeugspezifisch. Obwohl sich aus der Flugzeugmasse und -leistung (und der verfügbaren Schubumkehr) eine Mindestrollstrecke abschätzen lässt, hängt die tatsächliche Landerollstrecke auch von der Lage der Rollbahnen, der Verkehrslage sowie von flughafenspezifischen Regelungen über den Einsatz des Umkehrschubs ab.
Der Einsatz der Schubumkehr ist kein Standardverfahren. Sie kommt nur zur Anwendung, wenn das notwendige Abbremsen nicht mithilfe der Radbremsen erreicht werden kann. (Die Schubumkehr kann außerordentlich störend sein, da ein rasches Umschalten der Triebwerksleistung von Leerlauf auf Gegenschub einen plötzlichen Lärmausbruch verursacht.)
Die meisten Start-/Landebahnen werden jedoch sowohl für Starts als auch für Landungen genutzt, so dass die Schubumkehr nur sehr geringe Auswirkungen auf die Lärmkonturen hat, da die Gesamtschallenergie in der Nähe der Start-/Landebahn vom Lärm des Startbetriebs beherrscht wird. Lediglich dann, wenn eine Start-/ Landebahn ausschließlich für den Landebetrieb genutzt wird, kann der Beitrag der Schubumkehr zu den Konturen signifikant sein.
Physikalisch ist der Schubumkehrlärm ein sehr komplexer Prozess, doch lässt es sich aufgrund seiner relativ geringen Bedeutung für die Fluglärmkonturen grob vereinfachend modellieren, indem der rasche Wechsel der Triebwerksleistung durch eine geeignete Segmentierung berücksichtigt wird.
Es liegt auf der Hand, dass die Modellierung des Landerolllärms nicht so unkompliziert ist wie beim Startlauflärm. Die folgenden vereinfachten Modellierungsannahmen werden zur allgemeinen Verwendung empfohlen, wenn keine detaillierten Informationen zur Verfügung stehen (siehe Abbildung 2.7.h).
Abbildung 2.7.h Modellierung des Landerollens
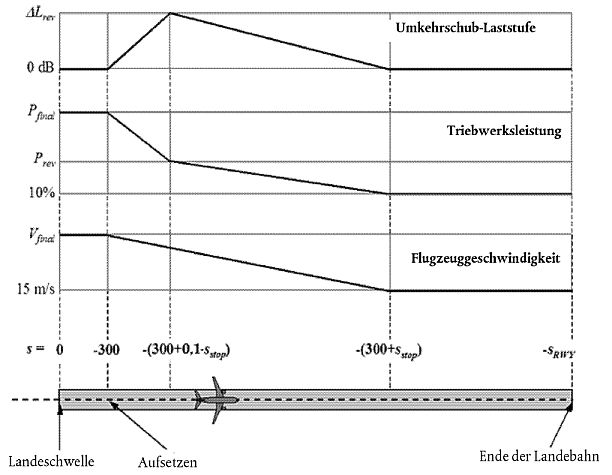
Das Flugzeug setzt 300 m hinter der Landeschwelle (Koordinate s = 0 auf dem Flugweg beim Anflug) auf. Anschließend wird das Flugzeug über eine Landerollstrecke sstop - flugzeugspezifische Werte dafür enthält die ANP-Datenbank - von der Endanfluggeschwindigkeit Vfinal auf 15 m/s abgebremst. Aufgrund der raschen Geschwindigkeitsänderungen in diesem Segment wird es mithilfe der Gleichungen 2.7.10 bis 2.7.13 ebenso in Untersegmente zerlegt wie beim Startlauf (oder bei Flugsegmenten mit raschen Geschwindigkeitsänderungen).
Die Triebwerksleistung ändert sich von der Endanflugleistung beim Aufsetzen zur Schubumkehreinstellung Prev über eine Strecke 0,1 x sstop und verringert sich dann über die restlichen 90 % der Ausrollstrecke auf 10 % der verfügbaren Volllast. Bis zum Ende der Landebahn (bei s = -sRWY) bleibt die Flugzeuggeschwindigkeit konstant.
Da sich derzeit keine NPD-Kurven für die Schubumkehr in der ANP-Datenbank befinden, müssen die konventionellen Kurven für die Modellierung dieses Effekts zugrunde gelegt werden. Typischerweise ist die Schubumkehrleistung Prev etwa 20 % der Volllasteinstellung, und dieser Wert wird empfohlen, wenn keine Betriebsinformationen verfügbar sind. Bei einer bestimmten Leistungseinstellung erzeugt die Schubumkehr jedoch tendenziell mehr Lärm als der Vorwärtsschub, so dass auf den NPD-hergeleiteten Ereigniswert ein Inkrement ΔL anzuwenden ist, das entlang 0,1 x sstop von null auf einen Wert ΔLrev (vorläufig werden 5 dB empfohlen 15) steigt und danach über die verbleibende Ausrollstrecke linear auf null sinkt.
2.7.14. Lärmberechnung für ein Einzelereignis
Den Kern des hier ausführlich beschriebenen Modellierungsprozesses bildet die Berechnung des Ereignispegels aus den in den Abschnitten 2.7.7 bis 2.7.13 beschriebenen Flugbahninformationen.
2.7.15. Einzelereignismaß
Der von einer Flugbewegung am Beobachtungsort erzeugte Schall wird als "Einzelereignis(schall)pegel" ausgedrückt, eine Größe, die einen Indikator für die Auswirkung des Schalls auf Menschen darstellt. Der empfangene Schall wird lärmmäßig anhand einer grundlegenden Dezibelskala L(t) gemessen, bei der eine Frequenzbewertung (Filter) zur Nachahmung einer Eigenschaft des menschlichen Gehörs zur Anwendung kommt. Die Skala mit der für die Fluglärmkonturmodellierung größten Bedeutung ist der A-bewertete Schallpegel LA.
Das zur Einbindung ganzer Ereignisse am häufigsten verwendete Maß sind "Einzelereignis-Schall- (oder Lärm) expositionspegel" LE, die die gesamte (oder den größten Teil der) Schallenergie in dem Ereignis berücksichtigen. Im Zusammenhang mit der notwendigen Zeitintegration ergeben sich die Hauptschwierigkeiten der Segmentierungs- (oder Simulations)modellierung. Einfacher zu modellieren ist das alternative Maß Lmax als maximaler Augenblickspegel während des Ereignisses. Den grundlegenden Baustein der meisten heutigen Fluglärmindizes bildet jedoch LE, und es ist davon auszugehen, dass Praxismodelle in der Zukunft sowohl Lmax als auch LE umfassen. Beide Maße lassen sich auf unterschiedlichen Lärmskalen messen. Im vorliegenden Dokument wird nur der A-bewertete Schallpegel betrachtet. Die Kennzeichnung der Skala erfolgt in der Regel durch eine entsprechende Suffixerweiterung, d. h. LAE, LAmax.
Der Einzelereignis-Schall- (oder Lärm)expositionspegel wird exakt ausgedrückt als
 |
(2.7.17) |
Dabei bezeichnet t0 eine Referenzzeit. Mit der Wahl des Integrationsintervalls [t1,t2] soll sichergestellt werden, dass (nahezu) der gesamte signifikante Schall im Ereignis erfasst ist. Sehr häufig werden die Begrenzer t1 und t2 gewählt, um die Zeitspanne auszudrücken, in der der Pegel L(t) nicht mehr als 10 dB unterhalb von Lmax liegt. Diese Spanne wird als "10 dB-down-time" bezeichnet. Lärmexpositionspegel in den Tabellen der ANP-Datenbank sind 10 dB-down-time-Werte 16.
Die Hauptanwendung der Gleichung 2.7.17 bei der Fluglärmkonturenmodellierung ist das StandardmaßLärmexpositionspegel LAE (SEL):
 |
(2.7.18) |
Die oben aufgeführten Expositionspegelgleichungen können zur Bestimmung von Ereignispegeln verwendet werden, wenn der gesamte Zeitverlauf L(t) bekannt ist. In der empfohlenen Lärmmodellierungsmethodik sind diese Zeitverläufe nicht definiert; die Berechnung der Ereignisexpositionspegel erfolgt durch Addition von Segmentwerten, deren jeweilige Teilereignispegel den Beitrag eines einzelnen endlichen Segments der Flugbahn bestimmen.
2.7.16. Bestimmung von Ereignispegeln anhand von NPD-Daten
Die Hauptquelle für Fluglärmdaten ist die internationale Aircraft Noise and Performance Database (ANP- Datenbank). Darin sind Lmax und LE als Funktionen der Ausbreitungsentfernung d für spezifische Luftfahrzeugmuster, -varianten, Flugkonfigurationen (Anflug, Abflug, Klappenstellungen) und Leistungseinstellungen P tabellarisch aufgeführt. Sie beziehen sich auf einen stationären Flug bei bestimmten Referenzgeschwindigkeiten Vref auf einer theoretisch unendlichen, geraden Flugbahn 17.
Wie die Angabe der Werte der unabhängigen Variablen P und d erfolgt, wird später beschrieben. Beim einmaligen Nachschlagen mit den Eingabewerten P und d sind die erforderlichen Ausgabewerte die Basispegel Lmax(P,d) und/oder LE∞(P,d) (anwendbar auf eine unendliche Flugbahn). Sollten in der Tabelle keine genauen Werte für P und/oder d angegeben sein, ist es generell notwendig, die benötigten Ereignislärmpegel durch Interpolation abzuschätzen. Dabei kommt zwischen tabellarisierten Leistungseinstellungen eine lineare Interpolation und zwischen tabellarisierten Abständen eine logarithmische Interpolation zur Anwendung (siehe Abbildung 2.7i).
Abbildung 2.7.i Interpolation bei Lärm-Leistung-Abstand-Kurven
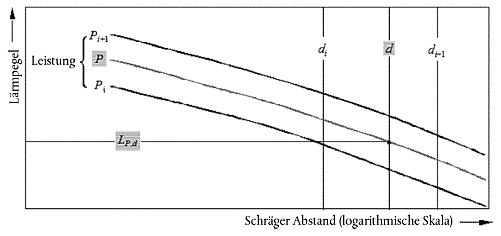
Wenn Pi und Pi +1 Triebwerksleistungswerte sind, für die Lärmpegel zu Abstandsdaten tabellarisiert sind, errechnet sich der Lärmpegel L(P) in einem bestimmten Abstand für die mittlere Leistung P zwischen Pi and Pi +1 wie folgt:
 |
(2.7.19) |
Wenn bei einer beliebigen Leistungseinstellung di und di +1 Abstände sind, für die Lärmdaten tabellarisiert sind, errechnet sich der Lärmpegel L(d) für einen mittleren Abstand d zwischen di und di +1 wie folgt:
 |
(2.7.20) |
Mit den Gleichungen ( 2.7.19) und ( 2.7.20) lässt sich ein Lärmpegel L(P,d) für eine beliebige Leistungseinstellung P und einen beliebigen Abstand d errechnen, der innerhalb des Rahmens der NPD-Datenbank liegt.
Für Abstände d außerhalb des NPD-Rahmens wird Gleichung 2.7.20 verwendet, um von den letzten beiden Werten zu extrapolieren, d. h. nach innen von L(d1) und L(d2) oder nach außen von L(dI - 1) und L(dI), wobei I die Gesamtzahl der NPD-Punkte in der Kurve bezeichnet. Somit ergibt sich:
| Nach innen: | (2.7.21) | |
| Nach außen: | (2.7.22) |
Da sich bei kurzen Abständen d die Lärmpegel sehr rasch mit abnehmender Ausbreitungsentfernung erhöhen, wird empfohlen, für d eine niedrigere Obergrenze von 30 m anzusetzen, d. h. d = max(d, 30 m).
Impedanzanpassung von Standard-NPD-Daten
Die in der ANP-Datenbank angegebenen NPD-Daten sind auf spezifische atmosphärische Bedingungen normalisiert (Temperatur 25 °C und Druck 101,325 kPa). Vor Anwendung der oben beschriebenen Interpolations-/Extrapolationsmethode ist für diese Daten eine akustische Impedanzanpassung vorzunehmen.
Die akustische Impedanz bezieht sich auf die Ausbreitung von Schallwellen in einem akustischen Medium und ist definiert als Produkt aus Luftdichte und Schallgeschwindigkeit. Bei einer in einem bestimmten Abstand von der Quelle empfangenen Schallintensität (Schallleistung je Flächeneinheit) hängt der damit zusammenhängende Schalldruck (zur Definition der Maße SEL und LAmax) von der akustischen Impedanz der Luft am Messort ab. Er ist eine Funktion der Temperatur, des Luftdrucks (und indirekt der Höhe). Daher müssen die Standard-NPD- Daten der ANP-Datenbank so angepasst werden, dass Temperatur und Druckbedingungen in ihren tatsächlichen Werten berücksichtigt werden, die sich im Allgemeinen von den normalisierten Bedingungen der ANP-Daten unterscheiden.
Die auf die Standard-NPD-Pegel anzuwendende Impedanzanpassung wird wie folgt ausgedrückt:
 |
(2.7.23) |
Dabei gilt Folgendes:
| ΔImpedance | Impedanzanpassung zur Berücksichtigung der tatsächlichen atmosphärischen Bedingungen am Empfangsort (dB) |
| ρ·c | Akustische Impedanz (Newton · Sekunden/m3) der Luft am Empfangsort (wobei 409,81 die mit den atmosphärischen Referenzbedingungen der NPD-Daten in der ANP-Datenbank zusammenhängende Luftimpedanz ist) |
Die Impedanz ρ·c wird wie folgt berechnet:
 |
(2.7.24) |
| δ | p/po, das Verhältnis des Umgebungsluftdrucks auf Beobachtungshöhe zum Standardluftdruck auf Meereshöhe: po = 101,325 kPa (oder 1.013,25 mb) |
| ϑ | (T + 273,15)/(T0 + 273,15) das Verhältnis der Lufttemperatur auf Beobachtungshöhe zur Standardlufttemperatur auf Meereshöhe: T0 = 15,0 °C |
Die akustische Impedanzanpassung beträgt in der Regel weniger als einige Zehntel dB. Es sei insbesondere darauf hingewiesen, dass unter den atmosphärischen Standardbedingungen (po = 101,325 kPa and T0 = 15,0 °C) die Impedanzanpassung weniger als 0,1 dB (0,074 dB) beträgt. Bei einer signifikanten Abweichung der Temperatur und des Luftdrucks gegenüber den atmosphärischen Referenzbedingungen der NPD-Daten kann die Anpassung jedoch erheblicher sein.
2.7.17. Allgemeine Ausdrücke
Segmentereignispegel Lseg
Die Bestimmung der Segmentwerte erfolgt durch Anwendung von Anpassungen auf die Basiswerte (unendliche Flugbahn) gemäß NPD-Daten. Der maximale Lärmpegel eines Flugbahnsegments Lmax,seg lässt sich im Allgemeinen ausdrücken als
| (2.7.25) |
und der Beitrag eines Flugbahnsegments zu LE als
| (2.7.26) |
Die "Korrekturterme" in den Gleichungen 2.7.25 und 2.7.26 - die in Abschnitt 2.7.19 ausführlich beschrieben werden - berücksichtigen die folgenden Effekte:
| ΔV | Dauerkorrektur: Die NPD-Daten beziehen sich auf eine Referenzfluggeschwindigkeit. Mit diesem Korrekturterm werden die Expositionspegel an Nichtreferenzgeschwindigkeiten angepasst. (Wird nicht auf Lmax,seg angewendet.) |
| ΔI (Φ) | Installationseffekt: beschreibt eine Änderung derlateralen Richtwirkung aufgrund einer von der Flugzeugzelle, den Triebwerken und umgebenden Strömungsfeldern bewirkten Abschirmung, Brechung oder Reflexion. |
| Λ(β, |
Seitliche Dämpfung: signifikant für Schall, der sich in kleinen Winkeln zum Boden hin ausbreitet. Berücksichtigt die Wechselwirkung zwischen direkten und reflektierten Schallwellen (Bodeneffekt) sowie die Effekte (in erster Linie vom Boden verursachter) atmosphärischer Ungleichmäßigkeiten, die Schallwellen auf deren Weg zum Beobachter seitlich der Flugbahn brechen. |
| ΔF | Korrektur aufgrund des endlichen Segments (Geräuschanteil): berücksichtigt die endliche Länge des Segments, die natürlich weniger an Lärmexposition beiträgt als eine unendliche Länge. Wird nur auf Expositionsmaße angewandt. |
Ist das Segment Teil des Startlaufs oder des Landerollens und befindet sich der Beobachter hinter dem betreffenden Segment, so werden spezielle Schritte zur Darstellung der ausgeprägten Richtcharakteristik von Strahltriebwerkslärm unternommen, der hinter einem startbereiten Flugzeug auftritt. Diese speziellen Schritte führen vor allem zur Verwendung einer besonderen Form des Lärms für den Expositionspegel:
| (2.7.27) | |
| (2.7.28) |
| Δ'F | Besondere Form der Segmentkorrektur |
| ΔSOR | Korrektur aufgrund der Richtcharakteristik: zur Berücksichtigung der ausgeprägten Richtcharakteristik von Strahltriebwerkslärm hinter dem An- bzw. Abrollsegment. |
Die spezifische Behandlung der An- und Abrollsegmente wird in Abschnitt 2.7.19 beschrieben.
Die nachfolgenden Abschnitte beschreiben die Berechnung von Segmentschallpegeln.
Ereignislärmpegel L einer Flugbewegung
DerMaximalpegel Lmax ist nichts weiter als der größte der Segmentwerte Lmax,seg (siehe Gleichung 2.7.25 und 2.7.27)
| Lmax = max(Lmax,seg) | (2.7.29) |
Dabei wird jeder Segmentwert anhand der Flugzeug-NPD-Daten für die Leistung P und den Abstand d bestimmt. Diese Parameter sowie die Modifikatoren ΔI (Φ) und Λ(β,![]() ) werden im Folgenden noch erläutert.
) werden im Folgenden noch erläutert.
DerExpositionspegel LE wird als Dezibelsumme der Beiträge LE,seg jedes lärmerheblichen Segments seiner Flugbahn berechnet, d. h.
| (2.7.30) |
Die Addition verläuft Schritt für Schritt durch die Flugbahnsegmente.
Der übrige Teil dieses Kapitels befasst sich mit der Bestimmung der Segmentschallpegel Lmax,seg und LE,seg.
2.7.18. Flugbahnsegmentparameter
Die Bestimmung der Leistung P und des Abstands d, für die die Basispegel Lmax,seg(P,d) und LE∞(P,d) aus den NPD-Tabellen interpoliert werden, erfolgt anhand von geometrischen und betrieblichen Parametern, die das Segment definieren. Wie das geschieht, wird nachfolgend mithilfe von Illustrationen der Ebene erläutert, die das Segment und den Beobachter enthält.
Geometrische Parameter
Die Abbildungen 2.7.j bis 2.7.l zeigen die Geometrien zwischen Quelle und Empfänger, wenn sich der Beobachter O (a) hinter, (b) neben und (c) vor dem Segment S1S2 befindet, wobei die Flugrichtung von S1 nach S2 weist. In diesen Diagrammen gilt Folgendes:
| O | ist der Beobachtungsort; |
| S1, S2 | sind der Startpunkt und der Endpunkt des Segments; |
| Sp | ist der Punkt des kleinsten Vorbeiflugabstands rechtwinklig zum Beobachter für das Segment oder dessen Verlängerung; |
| d1, d2 | sind die Abstände zwischen dem Startpunkt bzw. Endpunkt des Segments und dem Beobachter; |
| ds | ist der kürzeste Abstand zwischen Beobachter und Segment; |
| dp | ist der senkrechte Abstand zwischen Beobachter und verlängertem Segment (Mindestschrägabstand); |
| λ | ist die Länge des Flugbahnsegments; |
| q | ist der Abstand von S1 zu Sp (negativ, wenn sich der Beobachtungsort hinter dem Segment befindet). |
Abbildung 2.7.j Flugbahnsegmentgeometrie bei hinter dem Segment befindlichem Beobachter
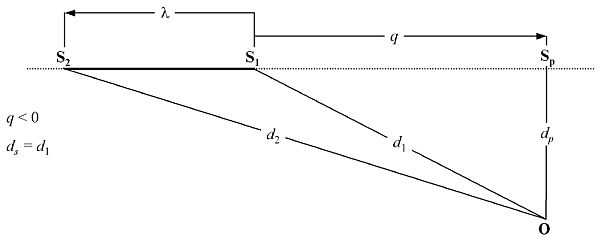
Abbildung 2.7.k Flugbahnsegmentgeometrie bei neben dem Segment befindlichem Beobachter
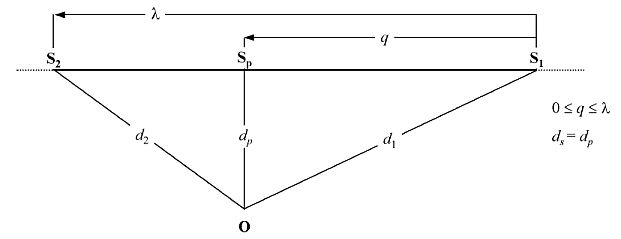
Abbildung 2.7.l Flugbahnsegmentgeometrie bei vor dem Segment befindlichem Beobachter
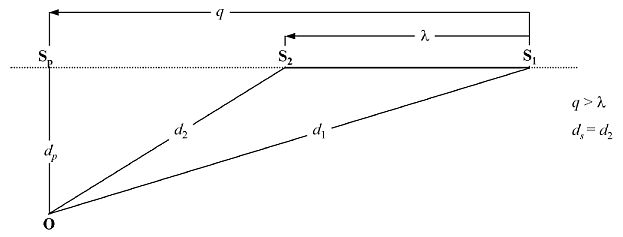
Das Flugbahnsegment ist durch eine dicke durchgehende Linie dargestellt. Die gepunktete Linie stellt dieFlugbahnverlängerung dar, die sich in beiden Richtungen ins Unendliche erstreckt. Bei Flugsegmenten ist, wenn das Ereignismaß ein Expositionspegel LE ist, der NPF-Abstandsparameter d der Abstand dp zwischen Sp und dem Beobachter, genanntMindestschrägabstand (d. h. der senkrechte Abstand zwischen dem Beobachter und dem Segment oder dessen Verlängerung, mit anderen Worten zur (hypothetisch) unendlichen Flugbahn, als deren Teil das Segment angesehen wird).
Bei Expositionspegelmaßen, bei denen sich die Beobachtungsorte hinter den Bodensegmenten während des Startlaufs bzw. vor den Bodensegmenten während des Landerollens befinden, wird jedoch der NPD- Abstandsparameter d zum Abstand ds, dem kürzesten Abstand zwischen Beobachter und Segment (d. h. ebenso wie bei Maximalpegelmaßen).
Bei Maximalpegelmaßen ist der NPD-Abstandsparameter d dann ds, der kürzeste Abstand zwischen Beobachter und Segment.
Segmentleistung P
Die tabellarisierten NPD-Daten beschreiben den Lärm eines Flugzeugs im stationären Geradeausflug auf einer unendlichen Flugbahn, d. h. bei konstanter Triebwerksleistung P. Mit der empfohlenen Methodik werden tatsächliche Flugbahnen, auf denen Geschwindigkeit und Richtung variieren, in eine Anzahl endlicher Segmente unterteilt, die jeweils als Teil einer einheitlichen unendlichen Flugbahn betrachtet werden, für die die NPD-Daten gültig sind. Die Methodik sieht jedoch Leistungsänderungen entlang eines Segments vor; es wird angenommen, dass sie sich linear mit zunehmendem Abstand von P1 am Anfang zu P2 am Ende des Segments ändert. Daher muss ein äquivalenter stationärer Segmentwert P definiert werden. Dieser wird als Wert an dem Punkt des Segments angenommen, der dem Beobachter am nächsten liegt. Befindet sich der Beobachter längs des Segments (Abbildung 2.7.k), errechnet sich der Wert durch Interpolation gemäß Gleichung 2.7.8 zwischen den Endwerten, d. h.
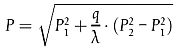 |
(2.7.31) |
Befindet sich der Beobachter hinter oder vor dem Segment, ist der Wert derjenige am nächstgelegenen Endpunkt P1 oder P2.
2.7.19. Korrekturterme für Segmentereignispegel
Die NPD-Daten definieren Lärmereignispegel als Funktion des Abstands senkrecht unterhalb einer idealisierten stationären Geradeausflugbahn unendlicher Länge, auf der sich das Flugzeug mit stationärer Leistung bei einer festen Referenzgeschwindigkeit bewegt 18. Der anhand der NPD-Tabelle für eine spezifische Leistungseinstellung und einen bestimmten Schrägabstand interpolierte Ereignispegel wird somit als Basispegel beschrieben. Er gilt für eine unendliche Flugbahn und muss korrigiert werden zur Berücksichtigung der Effekte (1) der Nichtreferenzgeschwindigkeit, (2) der Triebwerksanbringungseffekte (laterale Richtcharakteristik), (3) der seitlichen Dämpfung, (4) der endlichen Segmentlänge und (5) der longitudinalen Richtcharakteristik hinter dem Beginn des Startlaufs - siehe Gleichungen 2.7.25 und 2.7.26.
Dauerkorrektur ΔV (nur Expositionspegel LE)
Diese Korrektur 19 dient der Berücksichtigung der Änderung der Expositionspegel, wenn die Momentangeschwindigkeit über Grund im Segment von der Flugzeugreferenzgeschwindigkeit Vref, auf die sich die NPD-Basisdaten beziehen, abweicht. Wie die Triebwerksleistung schwankt auch die Geschwindigkeit entlang dem Segment (die Geschwindigkeit über Grund verändert sich von V1 zu V2), so dass eine äquivalente Segmentgeschwindigkeit Vseg bestimmt werden muss, wobei zu beachten ist, dass das Segment gegenüber dem Boden geneigt ist; d. h.
| Vseg = V/cosγ | (2.7.32) |
Dabei ist V eine äquivalente Segmentgeschwindigkeit über Grund (siehe zur Information Gleichung B-22, in der V als kalibrierte Fluggeschwindigkeit Vc ausgedrückt ist) und
 |
(2.7.33) |
Für Flugsegmente wird V angenommen als Geschwindigkeit über Grund am Punkt des kleinsten Vorbeiflugabstands S, interpoliert zwischen den Segmentendpunktwerten unter Annahme einer linearen Änderung im Zeitverlauf, d. h. wenn sich der Beobachter neben dem Segment befindet:
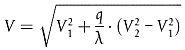 |
(2.7.34) |
Befindet sich der Beobachter hinter oder vor dem Segment, ist der Wert derjenige am nächstgelegenen Endpunkt V1 oder V2.
Für Segmente der Start-/Landebahn (Teile des Startlaufs oder Landerollens, für die gilt: γ = 0) wird Vseg einfach als Durchschnitt der Segmentanfangs- und -endgeschwindigkeit angenommen, d. h.
| Vseg = (V1 + V2)/2 | (2.7.35) |
In beiden Fällen beträgt die additive Dauerkorrektur somit
| ΔV = 10 · lg(Vref/Vseg) | (2.7.36) |
Geometrie der Schallausbreitung
Abbildung 2.7.m zeigt die Basisgeometrie in der Ebene senkrecht zur Flugbahn des Flugzeugs. Die Grundlinie ist die Schnittmenge zwischen der senkrechten Ebene und der Bezugsebene. (Verläuft die Flugbahn waagerecht, ist die Grundlinie eine Seitenansicht der Bezugsebene.) Das Flugzeug ist im Winkel ε gemessen entgegen dem Uhrzeigersinn, um seine Längsachse quergeneigt (d. h. die Steuerbord-Tragfläche weist nach oben). Er ist damit bei Linkskurven positiv und bei Rechtskurven negativ.
Abbildung 2.7.m Winkel zwischen Flugzeug und Beobachter in der Ebene senkrecht zur Flugbahn
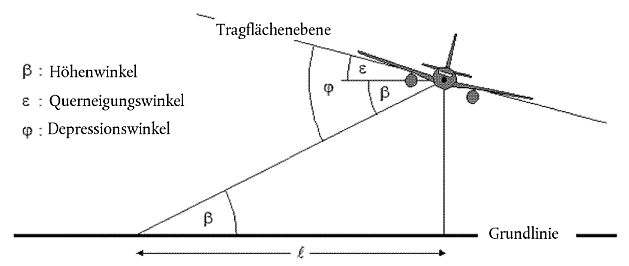
Korrektur aufgrund der Triebwerksanbringung ΔI
Ein überfliegendes Flugzeug stellt eine vielschichtige Schallquelle dar. Dabei kommt zu dem Umstand, dass sich die Triebwerke (und die Flugzeugzelle) als komplexe Ursprungsquellen erweisen, hinzu, dass auch die Zellenkonfiguration und insbesondere die Lage der Triebwerke die Schallabstrahlung beeinflussen, woran die Prozesse Reflexion, Brechung und Streuung durch die festen Oberflächen und die aerodynamischen Strömungsfelder beteiligt sind. Dies führt zu einer uneinheitlichen Richtwirkung des seitlich um die Längsachse des Flugzeugs abgestrahlten Schalls, was hier alslateraleRichtcharakteristik bezeichnet wird.
Hinsichtlich der lateralen Richtcharakteristik bestehen zwischen Flugzeugen mit am Rumpf montierten Triebwerken und solchen, bei denen die Triebwerke unter den Tragflächen angebracht sind, signifikante Unterschiede, die im folgenden Ausdruck berücksichtigt werden:
| ΔI[Φ] = 10 × lg[(a ×cos2Φ + sin2Φ]b/ (c × sin22Φ + cos22Φ)] | dB | (2.7.37) |
Dabei gilt Folgendes: ΔI (Φ) ist die Korrektur in dB beim Depressionswinkel Φ (siehe Abbildung 2.7.m) und
| a = 0,00384, | b = 0,0621, | c = 0,8786 | bei Triebwerken unterhalb der Tragflächen |
| a = 0,1225, | b = 0,3290, | c = 1 | bei Triebwerken am Rumpf. |
Bei Propellerflugzeugen sind die Unterschiede der Richtwirkung unerheblich und es kann hier angenommen werden, dass
| ΔI(Φ) = 0 | (2.7.38) |
Abbildung 2.7.n zeigt die Abweichung von ΔI(Φ) um die Längsachse des Flugzeugs für drei Triebwerksanbringungsarten. Diese empirischen Verhältnisse wurden von der Society of Automotive Engineers (SAE) aus experimentellen Messungen hauptsächlich unterhalb der Tragfläche hergeleitet. Bis zu einer Analyse von Daten, die oberhalb der Tragfläche gewonnen wurden, wird empfohlen, dass bei negativem Φ für alle Anbringungsarten ΔI(Φ) = ΔI(0) verwendet wird.
Abbildung 2.7.n Laterale Richtcharakteristik von Installationseffekten
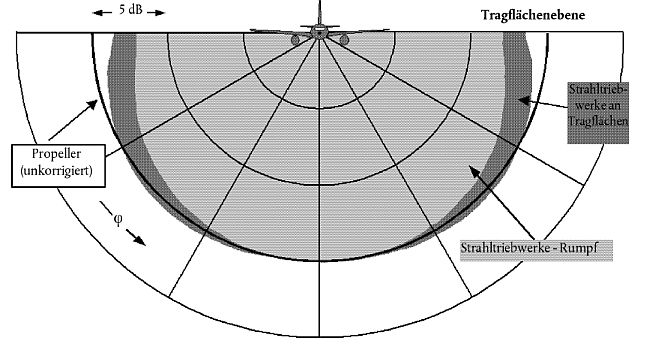
Es wird angenommen, dass die Korrektur ΔI (Φ) zweidimensional ist, d. h. sie hängt von keinem anderen Parameter ab und ändert sich insbesondere nicht mit dem Längsabstand zwischen Beobachter und Flugzeug. Somit wird derHöhenwinkel β für ΔI (Φ) definiert als β = tan-1(z/![]() ). Dies dient einer vereinfachten Modellierung, bis mehr über die Mechanismen bekannt ist; in Wirklichkeit handelt es sich bei den Installationseffekten im Wesentlichen um dreidimensionale Effekte. Dennoch ist ein zweidimensionales Modell dadurch gerechtfertigt, dass Ereignispegel eher von seitlich vom nächstgelegenen Segment abgestrahltem Lärm dominiert werden.
). Dies dient einer vereinfachten Modellierung, bis mehr über die Mechanismen bekannt ist; in Wirklichkeit handelt es sich bei den Installationseffekten im Wesentlichen um dreidimensionale Effekte. Dennoch ist ein zweidimensionales Modell dadurch gerechtfertigt, dass Ereignispegel eher von seitlich vom nächstgelegenen Segment abgestrahltem Lärm dominiert werden.
Seitliche Dämpfung Λ(β,![]() ) (unendliche Flugbahn)
) (unendliche Flugbahn)
Die tabellarisierten NPD-Ereignispegel beziehen sich auf einen stationären Horizontalflug und beruhen generell auf Messungen 1,2 m über weichem ebenem Grund unterhalb des Flugzeugs; der Abstandsparameter ist praktisch die Flughöhe über der Oberfläche. Es wird angenommen, dass mögliche Effekte der Oberfläche auf die Ereignisschallpegel unterhalb des Flugzeugs, die dazu führen könnten, dass sich die Tabellenpegel von den Freifeldwerten 21 unterscheiden, in den Daten enthalten sind (d. h. in Form der Verhältnisse Pegel/Abstand).
Seitlich der Flugbahn ist der Abstandsparameter der Mindestschrägabstand - die Länge der Senkrechten vom Empfänger zur Flugbahn. An jeder seitlichen Position ist der Lärmpegel generell geringer als im gleichen Abstand unmittelbar unterhalb des Flugzeugs. Neben derlateralen Richtcharakteristik oder den "Installationseffekten", wie sie oben beschrieben wurden, ist dies auf eine übermäßigeseitliche Dämpfung zurückzuführen, die bewirkt, dass der Schallpegel mit zunehmendem Abstand schneller sinkt als in den NPD-Kurven angegeben. Eine frühere weit verbreitete Methode zur Modellierung der seitlichen Ausbreitung von Fluglärm wurde von der Society of Automotive Engineers (SAE) in AIR-1751 entwickelt, wobei die weiter unten beschriebenen Algorithmen auf Verbesserungen beruhen, die von der SAE nunmehr in AIR-5662 empfohlen werden. Die seitliche Dämpfung ist ein Reflexionseffekt aufgrund der Interferenz zwischen direkt abgestrahltem und von der Oberfläche reflektiertem Schall. Sie hängt von der Art der Oberfläche ab und kann zu erheblich niedrigeren festgestellten Schallpegeln bei niedrigen Höhenwinkeln führen. Stark beeinflusst wird sie auch durch stetige und nicht stetige Brechung des Schalls aufgrund eines Wind- und Temperaturgefälles oder von Turbulenzen, die selbst auf die Oberflächenpräsenz zurückzuführen sind 22. Der Mechanismus der Oberflächenreflexion ist gut erforscht und für gleichbleibende atmosphärische und Oberflächenbedingungen lässt er sich theoretisch recht präzise beschreiben. Allerdings haben atmosphärische und oberflächenbedingte Unregelmäßigkeiten, die sich einer einfachen theoretischen Analyse entziehen, tiefgreifende Auswirkungen auf den Reflexionseffekt und neigen dazu, ihn auf größere Höhenwinkel zu "verteilen". Die SAE arbeitet fortlaufend an der Entwicklung eines besseren Verständnisses der Oberflächeneffekte, was zu besseren Modellen führen dürfte. Bis dahin wird die folgende in AIR-5662 beschriebene Methodik zur Berechnung der seitlichen Dämpfung empfohlen. Sie ist beschränkt auf den Fall der Schallausbreitung über weichem ebenem Grund, was für die große Mehrheit von Zivilflughäfen geeignet ist. Anpassungen an die Effekte einer harten Bodenoberfläche (oder, akustisch äquivalent, von Wasser) befinden sich noch in der Entwicklung.
Diese Methodik baut auf dem umfangreichen Bestand an Experimentaldaten zur Schallausbreitung von Flugzeugen mit am Rumpf montierten Triebwerken im stationären horizontalen Geradeausflug auf, wie sie ursprünglich in AIR-1751 aufgeführt waren. Unter der Annahme, dass im Horizontalflug die Luft-Boden- Dämpfung i) vom in der vertikalen Ebene gemessenen Höhenwinkel β und ii) vom seitlichen Versatz vom Flugweg des Flugzeugs![]() abhängt, wurden die Daten analysiert, so dass sich eine empirische Funktion für die seitlicheGesamtanpassung ΛT(β,
abhängt, wurden die Daten analysiert, so dass sich eine empirische Funktion für die seitlicheGesamtanpassung ΛT(β,![]() ) (= seitlicher Ereignispegel minus Pegel im gleichen Abstand unterhalb des Flugzeugs) ergibt.
) (= seitlicher Ereignispegel minus Pegel im gleichen Abstand unterhalb des Flugzeugs) ergibt.
Da der Term ΛT(β,![]() ) sowohl die laterale Richtcharakteristik als auch die seitliche Dämpfung berücksichtigt, kann die seitliche Dämpfung durch Subtraktion extrahiert werden. Bei Beschreibung der lateralen Richtcharakteristik durch Gleichung 2.7.37, mit den Rumpfmontagekoeffizienten und unter Ersetzung von Φ durch β (für Geradeausflug), wird die seitliche Dämpfung zu:
) sowohl die laterale Richtcharakteristik als auch die seitliche Dämpfung berücksichtigt, kann die seitliche Dämpfung durch Subtraktion extrahiert werden. Bei Beschreibung der lateralen Richtcharakteristik durch Gleichung 2.7.37, mit den Rumpfmontagekoeffizienten und unter Ersetzung von Φ durch β (für Geradeausflug), wird die seitliche Dämpfung zu:
| Λ(β, |
(2.7.39) |
Dabei erfolgt die Messung von β und![]() wie in Abbildung 2.7.m dargestellt in einer Ebene senkrecht zur unendlichen Flugbahn, die bei Horizontalflug auch vertikal ist.
wie in Abbildung 2.7.m dargestellt in einer Ebene senkrecht zur unendlichen Flugbahn, die bei Horizontalflug auch vertikal ist.
Obwohl sich Λ(β,![]() ) unter Verwendung der Gleichung 2.7.39 unter Entnahme von ΛT(β,
) unter Verwendung der Gleichung 2.7.39 unter Entnahme von ΛT(β,![]() ) aus AIR-1751 direkt berechnen ließe, wird ein effizienteres Verhältnis empfohlen. Dabei handelt es sich um die folgende empirische Approximation, adaptiert nach AIR-5662:
) aus AIR-1751 direkt berechnen ließe, wird ein effizienteres Verhältnis empfohlen. Dabei handelt es sich um die folgende empirische Approximation, adaptiert nach AIR-5662:
| Λ(β, |
(2.7.40) |
Dabei ist Γ(![]() ) ein Abstandsfaktor, gegeben durch
) ein Abstandsfaktor, gegeben durch
| Γ( |
für 0 ≤ |
(2.7.41) |
| Γ( |
für |
(2.7.42) |
und Λ(β) die weitreichende seitliche Luft-Boden-Dämpfung, gegeben durch
| Λ(β) = 1,137 - 0,0229β + 9,72 · exp(- 0,142β) | für 0° ≤ β ≤ 50° | (2.7.43) |
| Λ(β) = 0 | für 50° ≤ β ≤ 90° | (2.7.44) |
Der Ausdruck für die seitliche Dämpfung Λ(β,![]() ), Gleichung 2.7.40, der als gültig für sämtliche Flugzeuge (Propellerflugzeuge sowie Strahlflugzeuge mit am Rumpf bzw. unter den Tragflächen montierten Triebwerken) gilt, ist in Abbildung 2.7.o grafisch dargestellt.
), Gleichung 2.7.40, der als gültig für sämtliche Flugzeuge (Propellerflugzeuge sowie Strahlflugzeuge mit am Rumpf bzw. unter den Tragflächen montierten Triebwerken) gilt, ist in Abbildung 2.7.o grafisch dargestellt.
Unter bestimmten Umständen (mit Gelände) kann β kleiner als null sein. In solchen Fällen wird Λ(β) = 10,57 empfohlen.
Abbildung 2.7.o Änderung der seitlichen Dämpfung Λ(β,![]() ) mit Höhenwinkel und Abstand
) mit Höhenwinkel und Abstand
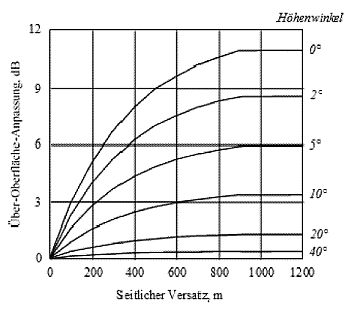
Seitliche Dämpfung in endlichen Segmenten
Die Gleichungen 2.7.41 bis 2.7.44 beschreiben die seitliche Dämpfung Λ(β,![]() ) von Schall, der von einem Flugzeug im stationären Flug auf einer unendlichen horizontalen Flugbahn beim Beobachter ankommt. Werden sie auf nicht horizontale endliche Flugbahnsegmente angewendet, so muss die Dämpfung für eineäquivalente horizontale Flugbahn berechnet werden, da der nächste Punkt in einer einfachen Verlängerung des geneigten Segments (das an einem bestimmten Punkt durch die Bodenoberfläche verläuft) im Allgemeinen keinen geeigneten Höhenwinkel β ergibt.
) von Schall, der von einem Flugzeug im stationären Flug auf einer unendlichen horizontalen Flugbahn beim Beobachter ankommt. Werden sie auf nicht horizontale endliche Flugbahnsegmente angewendet, so muss die Dämpfung für eineäquivalente horizontale Flugbahn berechnet werden, da der nächste Punkt in einer einfachen Verlängerung des geneigten Segments (das an einem bestimmten Punkt durch die Bodenoberfläche verläuft) im Allgemeinen keinen geeigneten Höhenwinkel β ergibt.
Die Bestimmung der seitlichen Dämpfung für endliche Segmente ist bei den Maßen Lmax und LE sehr unterschiedlich. Der Segmentmaximalpegel Lmax wird anhand von NPD-Daten als Funktion der Ausbreitungsentfernung d vom nächstgelegenen Punkt im Segment ermittelt. Für die Abmessungen des Segments sind keine Korrekturen erforderlich. Ebenso wird angenommen, dass die seitliche Dämpfung von Lmax nur vom Höhenwinkel desselben Punkts und vom Bodenabstand zu diesem Punkt abhängt. Somit werden nur die Koordinaten dieses Punkts benötigt. Bei LE ist der Prozess jedoch komplizierter.
Der Basisereignispegel LE(P,d), der für Parameter endlicher Segmente anhand der NPD-Daten bestimmt wird, gilt dennoch für einen unendlichen Flugweg. Natürlich ist der Ereignisexpositionspegel eines Segments LE,seg niedriger als der Basispegel, und zwar um den aufgrund des endlichen Segments erforderlichen Korrekturbetrag, der in Abschnitt 2.7.19 definiert wird. Diese Korrektur, eine Funktion der Geometrie der Dreiecke OS1S2 in den Abbildungen 2.7.j bis 2.7.l, legt fest, welcher Anteil der bei O empfangenen Lärmenergie der unendlichen Gesamtflugbahn vom Segment kommt. Dabei gilt die gleiche Korrektur ungeachtet dessen, ob eine seitliche Dämpfung vorliegt oder nicht. Jede seitliche Dämpfung ist jedoch für die unendliche Flugbahn zu berechnen, d. h. als Funktion ihres Versatzes und ihrer Höhe, nicht der des endlichen Segments.
Durch Addition der Korrekturen ΔV and ΔI und Subtraktion der seitlichen Dämpfung Λ(β,![]() ) vom NPD-Basispegel ergibt sich der angepasste Ereignisl´rmpegel für einen äquivalenten stationärenhorizontalen Flug auf einer angrenzenden unendlichen geraden Flugbahn. Die tatsächlichen modellierten Flugbahnsegmente, die die Lärmkonturen beeinflussen, sind jedoch selten horizontal, da sich die Flugzeuge meist im Steig- oder Sinkflug befinden.
) vom NPD-Basispegel ergibt sich der angepasste Ereignisl´rmpegel für einen äquivalenten stationärenhorizontalen Flug auf einer angrenzenden unendlichen geraden Flugbahn. Die tatsächlichen modellierten Flugbahnsegmente, die die Lärmkonturen beeinflussen, sind jedoch selten horizontal, da sich die Flugzeuge meist im Steig- oder Sinkflug befinden.
Abbildung 2.7.p veranschaulicht ein Abflugsegment S1S2 - das Flugzeug steigt im Winkel γ - doch sind die Konstellationen für einen Anflug sehr ähnlich. Der Rest der "realen" Flugbahn ist nicht dargestellt; hier soll der Hinweis genügen, dass S1S2 lediglich einen Teil der gesamten Bahn darstellt (die im Allgemeinen bogenförmig ist). In diesem Fall befindet sich der Beobachter O links neben dem Segment. Das Flugzeug ist (gegen den Uhrzeigersinn um die Flugbahn) im Winkel ε zur seitlichen Horizontalachse quergeneigt. Der Depressionswinkel Φ der Tragflächenebene, von dem der Installationseffekt ΔΙ eine Funktion darstellt (Gleichung 2.7.39), liegt in der Ebene senkrecht zur Flugbahn, in derε definiert ist. Somit gilt Φ = β - ε ; dabei ist β = tan-1(h/![]() ) und
) und![]() ist der senkrechte Abstand OR zwischen Beobachter und Flugweg; d. h. der seitliche Versatz des Beobachters 23. Der Punkt des kleinsten Vorbeiflugabstands des Flugzeugs vom Beobachter S wird durch die Senkrechte OS der Länge (Schrägabstand) dp definiert. Das Dreieck OS1S2 entspricht Abbildung 2.7.k, der Geometrie für die Berechnung der Segmentkorrektur ΔF.
ist der senkrechte Abstand OR zwischen Beobachter und Flugweg; d. h. der seitliche Versatz des Beobachters 23. Der Punkt des kleinsten Vorbeiflugabstands des Flugzeugs vom Beobachter S wird durch die Senkrechte OS der Länge (Schrägabstand) dp definiert. Das Dreieck OS1S2 entspricht Abbildung 2.7.k, der Geometrie für die Berechnung der Segmentkorrektur ΔF.
Abbildung 2.7.p Beobachter neben dem Segment
Zur Berechnung der seitlichen Dämpfung anhand der Gleichung 2.7.40 (wobei β in einer vertikalen Ebene gemessen wird), wird eineäquivalente horizontale Flugbahn in der vertikalen Ebene durch S1S2 und mit gleichem rechtwinkligen Schrägabstand dp vom Beobachter definiert. Deren Visualisierung erfolgt durch Drehung des Dreiecks ORS und seiner angebundenen Flugbahn um OR (siehe Abbildung 2.7.p) im Winkel γ, so dass sich das Dreieck ORS' bildet. Der Höhenwinkel dieser äquivalenten horizontalen Flugbahn (jetzt in einer vertikalen Ebene) ist β = tan-1(h/![]() ) (
) (![]() bleibt unverändert). In diesem Fall (Beobachter daneben) ist die seitliche Dämpfung Λ (β,
bleibt unverändert). In diesem Fall (Beobachter daneben) ist die seitliche Dämpfung Λ (β,![]() ) für die Maße LE und Lmax gleich.
) für die Maße LE und Lmax gleich.
Abbildung 2.7.q veranschaulicht die Situation, in der der Beobachtungspunkt Ohinter dem endlichen Segment und nicht daneben liegt. Hier wird das Segment als weiter entfernt befindlicher Teil einer unendlichen Bahn beobachtet; eine Senkrechte kann nur zum Punkt S p in seiner Verlängerung gezogen werden. Das Dreieck OS1S2 entspricht Abbildung 2.7.j, in der die Segmentkorrektur ΔF definiert wird. In diesem Fall sind jedoch die Parameter für die laterale Richtcharakteristik und die seitliche Dämpfung weniger offensichtlich.
Abbildung 2.7.q Beobachter hinter dem Segment
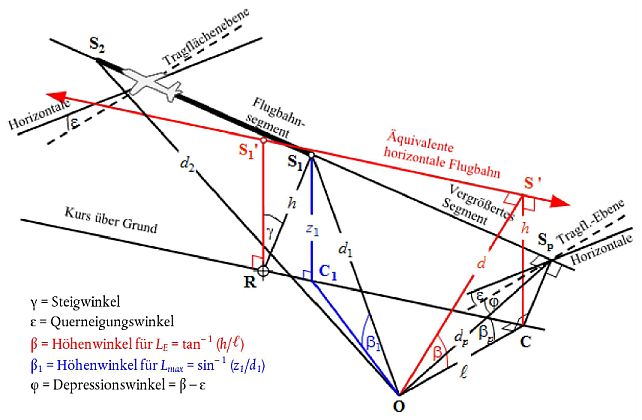
Da die laterale Richtcharakteristik (Installationseffekt) - für Modellierungszwecke - zweidimensional ist, wird der definierende Depressionswinkel Φ weiterhin seitlich von der Tragflächenebene gemessen. (Der Basisereignispegel ist nach wie vor der, der vom Flugzeug beim Flug auf der unendlichen Flugbahn, dargestellt vom verlängerten Segment, erzeugt wird.) Somit wird der Depressionswinkel am Punkt des kleinsten Vorbeiflugabstands bestimmt, d. h. Φ = βp - ε, wobei βp der Winkel SpOC ist.
Für das Maximalpegelmaß wird der NPD-Abstandsparameter als kürzester Abstand zum Segment angenommen, d. h. d = d1. Für das Expositionspegelmaß ist er der kürzeste Abstand dp zwischen O und Sp auf der verlängerten Flugbahn, d. h. der anhand der NPD-Tabelle interpolierte Wert ist LE∞ (P1, dp).
Auch die geometrischen Parameter für die seitliche Dämpfung sind bei der Berechnung des Maximal- und des Expositionspegels unterschiedlich. Für denMaximalpegel ist die Anpassung Λ(β,![]() ) durch die Gleichung 2.7.40 gegeben. Dabei gilt β = β1 = sin-1(z1/d1) und
) durch die Gleichung 2.7.40 gegeben. Dabei gilt β = β1 = sin-1(z1/d1) und![]() wobei β1 und d1 durch das Dreieck OC1S1 in der vertikalen Ebene durch O und S1 definiert sind.
wobei β1 und d1 durch das Dreieck OC1S1 in der vertikalen Ebene durch O und S1 definiert sind.
Bei der Berechnung der seitlichen Dämpfung nur für Flugsegmente und das Maß Expositionspegel bleibt![]() der kürzeste seitliche Versatz von der Segmentvverlängerung ( OC). Um jedoch einen geeigneten Wert von β zu definieren, ist erneut die Visualisierung einer (unendlichen)äquivalenten horizontalen Flugbahn notwendig, als deren Teil das Segment betrachtet wird. Gezogen wird diese Bahn durch S1', Flughöhe h über der Oberfläche, wobei h gleich der Länge von RS1 ist, der Senkrechten vom Flugweg zum Segment. Dies entspricht einer Drehung der tatsächlichen verlängerten Flugbahn mit Winkel γ um Punkt R (siehe Abbildung 2.7.q). Soweit sich R auf der Senkrechten zu S1 befindet, dem Punkt im Segment, der O am nächsten liegt, ist die Konstruktion der äquivalenten horizontalen Flugbahn die gleiche wie bei einem neben dem Segment befindlichen O.
der kürzeste seitliche Versatz von der Segmentvverlängerung ( OC). Um jedoch einen geeigneten Wert von β zu definieren, ist erneut die Visualisierung einer (unendlichen)äquivalenten horizontalen Flugbahn notwendig, als deren Teil das Segment betrachtet wird. Gezogen wird diese Bahn durch S1', Flughöhe h über der Oberfläche, wobei h gleich der Länge von RS1 ist, der Senkrechten vom Flugweg zum Segment. Dies entspricht einer Drehung der tatsächlichen verlängerten Flugbahn mit Winkel γ um Punkt R (siehe Abbildung 2.7.q). Soweit sich R auf der Senkrechten zu S1 befindet, dem Punkt im Segment, der O am nächsten liegt, ist die Konstruktion der äquivalenten horizontalen Flugbahn die gleiche wie bei einem neben dem Segment befindlichen O.
Der kleinste Abstand der äquivalenten horizontalen Flugbahn zum Beobachter O lieht bei S', Schrägabstand d, so dass das auf diese Weise in der vertikalen Ebene gebildete Dreieck OCS' den Höhenwinkel β = cos-1(![]() /d) definiert. Auch wenn diese Transformation recht verschlungen erscheint, sei darauf hingewiesen, dass die Geometrie der Basisquelle (definiert durch d1, d2 and Φ) unberĚhrt bleibt. Der sich vom Segment zum Beobachter bewegende Schall ist mit dem Schall identisch, der auftreten würde, wenn der gesamte Flug entlang dem unendlich verlängerten geneigten Segment (zu dem das Segment zu Modellierungszwecken gehört) mit der konstanten Geschwindigkeit V und der konstanten Leistung P1 erfolgen würde. Andererseits steht die seitliche Dämpfung des vom Beobachter vom Segmentempfangenen Schalls nicht in Beziehung zu βp, dem Höhenwinkel der verlängerten Flugbahn, sondern zu β, dem Höhenwinkel der äquivalenten Bahn.
/d) definiert. Auch wenn diese Transformation recht verschlungen erscheint, sei darauf hingewiesen, dass die Geometrie der Basisquelle (definiert durch d1, d2 and Φ) unberĚhrt bleibt. Der sich vom Segment zum Beobachter bewegende Schall ist mit dem Schall identisch, der auftreten würde, wenn der gesamte Flug entlang dem unendlich verlängerten geneigten Segment (zu dem das Segment zu Modellierungszwecken gehört) mit der konstanten Geschwindigkeit V und der konstanten Leistung P1 erfolgen würde. Andererseits steht die seitliche Dämpfung des vom Beobachter vom Segmentempfangenen Schalls nicht in Beziehung zu βp, dem Höhenwinkel der verlängerten Flugbahn, sondern zu β, dem Höhenwinkel der äquivalenten Bahn.
Der Fall, in dem sich ein Beobachter vor dem Segment befindet, wird nicht gesondert beschrieben; da es auf der Hand liegt, dass er im Wesentlichen den Gegebenheiten des dahinter befindlichen Beobachters entspricht.
Allerdings wird beim Expositionspegelmaß, bei dem sich der Standort des Beobachters während des Startlaufs hinter den Bodensegmenten und während des Landerollens vor den Bodensegmenten befindet, der Wert von β der gleiche wie beim Maximalpegelmaß, d. h.![]()
Korrektur aufgrund des endlichen Segments ΔF (nur Expositionspegel LE)
Der angepasste Basis-Lärmexpositionspegel bezieht sich auf ein Flugzeug im kontinuierlichen stationären horizontalen Geradeausflug (allerdings mit einem Querneigungswinkel ε, der mit dem Geradeausflug nicht vereinbar ist). Bei Anwendung der (negativen)Korrektur aufgrund des endlichen Segments ΔF = 10 x lg(F), wobei F derEnergieanteil ist, wird der Pegel weiter an Bedingungen angepasst, bei denen das Flugzeug nur das endliche Segment passieren würde (oder für den Rest der unendlichen Flugbahn vollkommen geräuschlos wäre).
Der Term Energieanteil berücksichtigt die ausgeprägte longitudinale Richtcharakteristik des Fluglärms und den vom Segment an der Beobachterposition begrenzten Winkel. Obgleich die die Richtwirkung verursachenden Prozesse sehr komplex sind, geht aus Studien hervor, dass die resultierenden Konturen gegenüber der genauen angenommenen Richtcharakteristik recht unempfindlich sind. Der weiter unten angegebene Ausdruck für ΔF basiert auf einem 90-Grad-Dipol-Modell der vierten Potenz für die Schallabstrahlung. Eine Nichtbeeinflussung durch die laterale Richtcharakteristik und seitliche Dämpfung wird angenommen. Die Herleitung dieser Korrektur wird ausführlich in Anlage E beschrieben.
Der Energieanteil F ist eine Funktion des in den Abbildungen 2.7.j bis 2.7.l definierten "Sichtdreiecks", so dass sich Folgendes ergibt:
 |
(2.7.45) |
Dabei gilt
![]()
und dλ wird als "skalierter Abstand" bezeichnet (siehe Anlage E). Zu beachten ist, dass Lmax(P, dp) der anhand der NPD-Daten ermittelte Maximalpegel für den senkrechten Abstand dp undnicht der Lmax des Segments ist.
Es wird empfohlen, für ΔF eine Untergrenze von -150 dB anzuwenden.
In dem besonderen Fall, dass sich die Beobachtungsorte hinter jedem Startlaufsegment und jedem Landerollsegment befinden, wird eine reduzierte Form des in Gleichung 2.7.45 ausgedrückten Lärmanteils verwendet, die dem spezifischen Fall von q = 0 entspricht. Die Berechnung erfolgt unter Verwendung von
| (2.7.46) |
Dabei gilt α2 = λ/dλ; ΔSOR ist die durch die Gleichungen 2.7.51 und 2.7.52 definierte Richtwirkungsfunktion am Start-of-Roll-Punkt.
Die Gründe für die Verwendung dieser besonderen Form des Lärmanteils werden im nachfolgenden Abschnitt im Rahmen der Anwendungsmethode für die Richtcharakteristik am Start-of-Roll-Punkt näher erläutert.
Spezifische Behandlung der Rollsegmente, einschließlich Richtwirkungsfunktion am Start-of-Roll-Punkt ΔSOR
Bei den Startlauf- und Landerollsegmenten erfolgt eine spezifische Behandlung, die im Folgenden erläutert wird.
Richtwirkungsfunktion am Start-of-Roll-Punkt ΔSOR
Das Geräusch von Strahlflugzeugen, vor allem wenn sie mit Triebwerken mit niedrigerem Nebenstromverhältnis ausgestattet sind, weist eine für Strahltriebwerkslärm typische keulenförmige Abstrahlcharakteristik im hinteren Bogen auf. Diese Charakteristik ist umso ausgeprägter, je höher die Strahlgeschwindigkeit und je niedriger die Fluggeschwindigkeit liegt. Von besonderer Bedeutung ist dies für Beobachtungsorte hinter dem Start-of-Roll- Punkt, wo beide Bedingungen erfüllt sind. Dieser Effekt wird durch eine Richtwirkungsfunktion ΔSOR berücksichtigt.
Die Funktion ΔSOR wurde aus mehreren Lärmmesskampagnen hergeleitet, bei denen Mikrofone hinter und seitlich des Start-of-Roll-Punkts abfliegender Strahlflugzeuge positioniert wurden.
Abbildung 2.7.r zeigt die entsprechenden geometrischen Verhältnisse. Der Azimutwinkel ψ zwischen der Längsachse des Flugzeugs und dem Vektor zum Beobachter ist definiert durch
| ψ = arccos(q/dSOR). | (2.7.47) |
Der relative Abstand q ist negativ (siehe Abbildung 2.7.j), so dass sich ψ zwischen 0° in Vorwärtsrichtung des Flugzeugs bis 180° in umgekehrter Richtung bewegt.
Abbildung 2.7.r Geometrie Flugzeug-Beobachter am Boden zur Abschätzung der Richtwirkungskorrektur
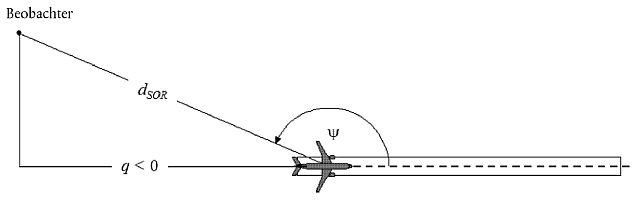
Die Funktion ΔSOR stellt die Änderung des vom Startlauf ausgehenden Gesamtlärms, gemessen hinter dem Start- of-Roll-Punkt, gegenüber dem Gesamtlärm des Startlaufs, gemessen seitlich des Start-of-Roll-Punkts im gleichen Abstand, dar:
| LTGR(dSOR,ψ) = LTGR(dSOR,90°) + ΔSOR(dSOR,ψ) | (2.7.48) |
Dabei ist LTGR(dSOR,90°) der von allen Startlaufsegmenten im Punktabstand dSOR seitlich des Start-of-Roll-Punkts erzeugte Startlauf-Gesamtlärmpegel. Bei Abständen dSOR von weniger als einem Normalisierungsabstand dSOR,0 ist die Richtwirkungsfunktion am Start-of-Roll-Punkt gegeben durch
| (2.7.49) | |
| (2.7.50) |
Ist der Abstand dSOR größer als der Normalisierungsabstand dSOR,0, wird die Richtwirkungskorrektur mit einem Korrekturfaktor multipliziert, um zu berücksichtigen, dass die Richtwirkung bei größeren Abständen zum Flugzeug weniger ausgeprägt ist; d. h.
| (2.7.51) | |
 |
(2.7.52) |
Der Normalisierungsabstand dSOR,0 ist gleich 762 m (2.500 ft).
Behandlung von Empfängern, die sich hinter jedem Startlauf- und Landerollsegment befinden
Die oben beschriebene Funktion ΔSOR erfasst vor allem die ausgeprägte Richtwirkung des Anfangsabschnitts des Startlaufs an Orten hinter dem Start-of-Roll-Punkt (da er den Empfängern am nächsten liegt und die höchste relative Strahlgeschwindigkeit (im Verhältnis zur Flugzeuggeschwindigkeit) aufweist). Die Verwendung der damit etablierten ΔSOR ist jedoch auf Positionen hinterjedem einzelnen Startlauf- wie auch Landerollsegment "verallgemeinert", also nicht nur hinter dem Start-of-Roll-Punkt (beim Start).
Die Parameter dS und ψ werden bezogen auf den Anfang jedes einzelnen Rollsegments berechnet.
Die Berechnung des Ereignispegels Lseg für einen Ort hinter einem bestimmten Startlauf- oder Landerollsegment erfolgt zur Einhaltung des Rechenformalismus der Funktion ΔSOR: Er wird im Wesentlichen für den seitlich des Startpunkts des Segments im gleichen Abstand dS wie der eigentliche Punkt gelegenen Bezugspunkt berechnet und mit ΔSOR weiter angepasst, so dass sich der Ereignispegel am eigentlichen Punkt ergibt.
Das bedeutet, dass die verschiedenen Korrekturterme in den nachstehenden Gleichungen die geometrischen Parameter verwenden müssen, die diesem seitlich des Startpunkts gelegenen Bezugspunkt entsprechen:
| Lmax,seg = Lmax(P,d = ds) +ΔI(Φ) - Λ(β,l = ds) +ΔSOR | (2.7.53) |
| LE,seg = LE∞(P,d = ds) +ΔV +ΔI(Φ) - Λ(β,l = ds) +Δ'F +ΔSOR | (2.7.54) |
Dabei ist Δ'F die in Gleichung ( 2.7.46) ausgedrückte reduzierte Form des Lärmanteils für den Fall q = 0 (da der Bezugspunkt sich seitlich des Startpunkt befindet), und es sei daran erinnert, dass dλ unter Verwendung von dS (und nicht von dp) zu berechnen ist:
| (2.7.55) |
2.7.20. Ereignislärmpegel L der Flugbewegung eines Luftfahrzeugs der allgemeinen Luftfahrt
Die in Abschnitt 2.7.19 beschriebene Methode ist auf Luftfahrzeuge der allgemeinen Luftfahrt mit Propellermotor anwendbar, wenn sie hinsichtlich der Triebwerksanbringungseffekte als Propellerflugzeuge behandelt werden.
Die ANP-Datenbank enthält Einträge für mehrere Luftfahrzeuge der allgemeinen Luftfahrt. Wenngleich es sich dabei oft um die gebräuchlichsten Luftfahrzeuge der allgemeinen Luftfahrt handelt, kann es mitunter sinnvoll sein, zusätzliche Daten heranzuziehen.
Sind die konkreten Luftfahrzeuge der allgemeinen Luftfahrt entweder nicht bekannt oder nicht in der ANP- Datenbank verzeichnet, wird die Verwendung der generischeren Luftfahrzeugdaten GASEPF bzw. GASEPV empfohlen. Diese Datensätze stehen für ein einmotoriges Kleinflugzeug der allgemeinen Luftfahrt mit unverstellbarem bzw. verstellbarem Propeller. Tabellen mit Einträgen sind in Anlage I aufgeführt (Tabellen I-11 I-17).
2.7.21. Methode zur Berechnung von Hubschrauberlärm
Zur Berechnung von Hubschrauberlärm kann die gleiche (in Abschnitt 2.7.14 umrissene) Rechenmethode verwendet werden wie für Starrflügelflugzeuge, vorausgesetzt Hubschrauber werden als Propellerflugzeuge behandelt und mit Strahlflugzeugen verbundene Triebwerksanbringungseffekte werden nicht angewendet. Tabellen mit Einträgen für zwei verschiedene Datensätze sind in Anhang I aufgeführt (Tabellen I-18 I-27).
2.7.22. Lärm im Zusammenhang mit Triebwerksprobeläufen, Rollverkehr und Hilfsenergieaggregaten
Soll Lärm im Zusammenhang mit Triebwerksprobeläufen und Hilfsenergieaggregaten modelliert werden, erfolgt diese Modellierung anhand des Kapitels zu Industrielärm. Obwohl dies normalerweise nicht der Fall ist, kann Lärm von Triebwerksprobeläufen auf Flughäfen zur Lärmbelastung beitragen. Sie werden in der Regel zu technischen Zwecken für die Überprüfung der Triebwerksfunktion durchgeführt. Dazu werden die Flugzeuge in sicherer Entfernung von Gebäuden, anderen Luftfahrzeugen sowie Fahrzeug- und Personenverkehr abgestellt, um Schäden durch den Abgasstrahl zu vermeiden.
Aus zusätzlichen Sicherheits- und Lärmschutzgründen können Flughäfen - vor allem Flughäfen mit Wartungseinrichtungen, in denen häufig Triebwerksprüfungen stattfinden - sogenannte Schallschutzkabinen installieren, also U-förmig angeordnete Schallschutzwände, die so ausgebildet sind, dass sie den Triebwerksstrahl und die entsprechenden Geräusche ablenken und ableiten können. Eine Untersuchung der von diesen Einrichtungen ausgehenden Lärmimmission, die sich durch zusätzliche Erdwälle oder weitere Schallschutzwände weiter dämpfen und reduzieren lässt, erfolgt am besten durch die Behandlung der Schallschutzkabine als Quelle von Industrielärm und durch Anwendung eines geeigneten Lärm- und Schallausbreitungsmodells.
2.7.23. Berechnung kumulativer Pegel
In den Abschnitten 2.7.14 bis 2.7.19 wird die Berechnung des Ereignisschallpegels einer einzelnen Flugbewegung an einem einzelnen Beobachtungsort beschrieben. Die Berechnung der Gesamtlärmexposition an diesem Ort erfolgt durch Akkumulierung der Ereignispegel aller lärmerheblichen Flugbewegungen, d. h. aller ankommenden und abgehenden Flüge, die den kumulativen Pegel beeinflussen.
2.7.24. Gewichtete äquivalente Schallpegel
Zeitgewichtete äquivalente Schallpegel, die die gesamte empfangene signifikante Flugzeugschallenergie berücksichtigen, werden generisch mit der folgenden Formel ausgedrückt:
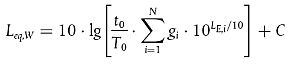 |
(2.7.56) |
Die Addition erfolgt über sämtliche Lärmereignisse N während des Zeitintervalls T0, für das der Lärmindex gilt. LE,i ist der Einzelereignis-Lärmexpositionspegel des i-ten Lärmereignisses. gi ist ein tageszeitabhängiger Gewichtungsfaktor (in der Regel definiert für die Zeitspannen Tag, Abend und Nacht). Im Prinzip ist gi ein Multiplikationsfaktor für die Anzahl der Flüge in bestimmten Zeiträumen. Die Konstante C kann unterschiedliche Bedeutungen haben (normalisierende Konstante, jahreszeitliche Bereinigung usw.).
Unter Verwendung der Beziehung
gi = 10Δi=10
bei der Δi die Dezibelgewichtung für den i-ten Zeitraum ist, lässt. sich Gleichung 2.7.56 umschreiben als
 |
(2.7.57) |
d. h. die tageszeitliche Gewichtung wird durch eine additive Pegelverschiebung ausgedrückt.
2.7.25. Die gewichtete Zahl der Flüge
Der kumulative Lärmpegel wird durch Addition der Beiträge aller verschiedenen Muster oder Kategorien von Luftfahrzeugen auf unterschiedlichen Flugrouten, die das Flughafenszenario ausmachen, abgeschätzt.
Zur Beschreibung dieses Additionsprozesses werden die folgenden tiefgestellten Indizes eingeführt:
i Index für Luftfahrzeugmuster oder -kategorie,
j Index für Flugstrecke oder Unterstrecke (wenn Unterstrecken festgelegt sind),
k Index für Flugstreckensegment.
Viele Lärmindizes - vor allem äquivalente Schallpegel - enthalten tageszeitliche Gewichtungsfaktoren gi in ihrer Definition (Gleichung 2.7.56 und 2.7.57).
Der Additionsprozess lässt sich durch Einführung einer "gewichteten Zahl der Flüge" vereinfachen:
| Mij = (gday · Nij,day + gevening · Nij,evening + gnight · Nij,night) | (2.7.58) |
Die Werte Nij stellen die Zahl der Flüge des Flugzeugmusters/der Flugzeugkategorie i auf der Strecke (oder Unterstrecke) j in den Zeiträumen Tag, Abend bzw. Nacht dar 24.
Anhand der Gleichung ( 2.7.57) ist der (generische) kumulative äquivalente Schallpegel Leq am Beobachtungspunkt (x,y)
 |
(2.7.59) |
T0 ist der Referenzzeitraum. Er hängt - außer von den Gewichtungsfaktoren gi - von der spezifischen Definition des verwendeten Index (z.B. LDEN) ab. LE,ijk ist der Einzelereignis-Lärmpegelbeitrag des Segments k von Strecke oder Unterstrecke j für den Flug eines Luftfahrzeugs der Kategorie i. Die Abschätzung von LE,ijk wird in den Abschnitten 2.7.14 bis 2.7.19 ausführlich beschrieben.
2.7.26. Standardgitterberechnung und Verfeinerung
Wenn Lärmkonturen durch Interpolation zwischen Indexwerten an rechteckig angeordneten Gitterpunkten ermittelt werden, hängt ihre Genauigkeit von der Wahl der Gitterweite (Maschenweite) ΔG ab, vor allem innerhalb von Zellen, in denen ein großes Gefälle bei der räumlichen Verteilung des Index zu einer engen Krümmung der Konturen führt (siehe Abbildung 2.7.s). Durch eine engere Gitterweite lassen sich Interpolationsfehler reduzieren, doch erhöht sich damit die Zahl der Gitterpunkte, was die Berechnungszeit verlängert. Für eine Optimierung der Gitterweite müssen Modellierungsgenauigkeit und Laufzeit gegeneinander abgewogen werden.
Abbildung 2.7.s Standardgitter und Gitterverfeinerung
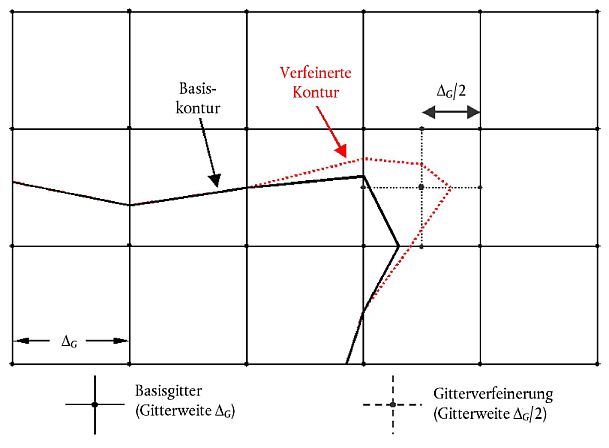
Eine deutliche Verbesserung der Recheneffizienz mit genaueren Ergebnissen wird mit der Verwendung eines unregelmäßigen Gitters zur Verfeinerung der Interpolation in kritischen Zellen erzielt. Das in Abbildung 2.7.s abgebildete Verfahren besteht darin, die Maschenweite lokal zu verengen und den Großteil des übrigen Gitters unverändert zu lassen. Dies ist sehr unkompliziert und erfolgt mit den folgenden Schritten:

Soll die Wertereihe mit anderen aggregiert werden (z.B. bei der Berechnung gewichteter Indizes durch Addition getrennter Tag-, Abend- und Nachtkonturen), ist darauf zu achten, dass die getrennten Gitter identisch sind.
2.7.27. Verwendung gedrehter Gitter
In vielen praktischen Fällen verläuft eine Lärmkontur in Wirklichkeit symmetrisch um einen Flugweg. Wenn die Richtung dieses Flugwegs jedoch nicht mit dem Berechnungsgitter ausgefluchtet ist, kann dies einen asymmetrischen Konturverlauf zur Folge haben.
Abbildung 2.7.t Verwendung eines gedrehten Gitters
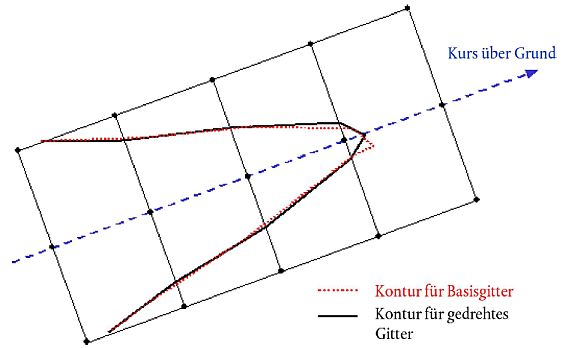
Die einfachste Möglichkeit zur Vermeidung dieses Effekts ist eine engmaschigere Gestaltung des Gitters, was jedoch die Rechenzeit verlängert. Eine elegantere Lösung besteht darin, das Berechnungsgitter so zu drehen, dass seine Richtung parallel zu den Hauptflugwegen (d. h. in der Regel parallel zur Hauptpiste) verläuft. Abbildung 2.7.t zeigt die Wirkung einer derartigen Gitterdrehung auf den Konturverlauf.
2.7.28. Nachzeichnen von Konturen
Ein zeitsparender Algorithmus, bei dem bei nur wenig mehr Rechenaufwand darauf verzichtet werden kann, eine ganze Gitterreihe von Indexwerten zu berechnen, besteht darin, den Verlauf der Kontur Punkt für Punkt nachzuzeichnen. Dazu bedarf es zweier Grundschritte, die auszuführen und zu wiederholen sind (siehe Abbildung 2.7.u):
Abbildung 2.7.u Konzept des Nachzeichnungsalgorithmus
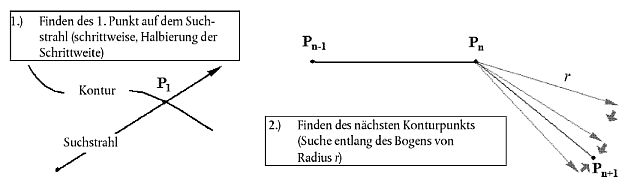
Schritt 1 besteht darin, einen ersten Punkt P1 auf der Kontur zu finden. Dies erfolgt durch Berechnung der Lärmindexpegel L in abstandsgleichen Schritten entlang eines "Suchstrahls", von dem erwartet wird, dass er die benötigte Kontur des Pegels LC kreuzt. Beim Kreuzen der Kontur ändert die Differenz δ = LC - L das Vorzeichen. Daraufhin wird die Schrittweite entlang des Strahls halbiert, und die Suchrichtung wird umgekehrt, und zwar so lange, bis δ kleiner ist als eine vorher festgelegte Genauigkeitsschwelle.
Schritt 2, der so lange wiederholt wird, bis die Kontur hinreichend definiert ist, besteht darin, den nächsten Punkt auf der Kontur LC zu finden, der sich in einem bestimmten geradlinigen Abstand r vom aktuellen Punkt befindet. In aufeinanderfolgenden Winkelschritten werden Indexpegel und Differenzen δ an den Enden von Vektoren berechnet, die einen Bogen mit dem Radius r beschreiben. Durch eine entsprechende Halbierung und Umkehrung der Inkremente, diesmal in Richtung des Vektors, wird der nächste Konturpunkt mit vorher festgelegter Genauigkeit bestimmt.
Abbildung 2.7.v Geometrische Parameter zur Definition der Bedingungen für den Nachzeichnungsalgorithmus
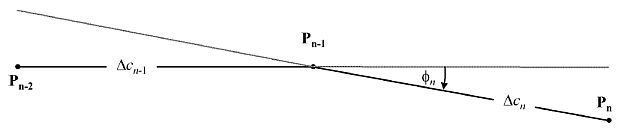
Es werden einige Nebenbedingungen gestellt, um zu gewährleisten, dass die Kontur mit einem hinreichenden Grad der Genauigkeit abgeschätzt wird (siehe Abbildung 2.7.v):
Φn· max(Δcn - 1, Δcn) ≤ ε (ε ≈ 15 m)
Dabei ist Φn die Differenz der Sehnenrichtungen.
Wie Erfahrungen mit diesem Algorithmus zeigen, müssen im Durchschnitt zwei bis drei Indexwerte berechnet werden, um einen Konturpunkt mit einer Genauigkeit von besser als 0,01 dB zu bestimmen.
Besonders bei einer notwendigen Berechnung großer Konturen beschleunigt dieser Algorithmus die Berechnungszeit erheblich. Es sei jedoch darauf hingewiesen, dass seine Umsetzung Erfahrung voraussetzt, vor allem, wenn sich eine Kontur in getrennte Inseln aufteilt.
2.8. Zuweisung von Lärmpegeln und von Bewohnern zu Gebäuden
Für die Bewertung der Lärmexposition der Bevölkerung sind nur Wohngebäude zu betrachten. Anderen nicht zu Wohnzwecken genutzten Gebäuden wie Schulen, Krankenhäuser, Bürogebäude oder Fabriken sind keine Personen zuzuweisen. Der Zuweisung von Bewohnern zu den Wohngebäuden sind die neuesten amtlichen Daten (entsprechend den einschlägigen Regelungen des Mitgliedstaates) zugrunde zu legen.
Da die Fluglärmberechnung anhand eines Rasters mit der Auflösung 100 m x 100 m erfolgt, sind die Pegel auf der Basis der Lärmpegel des nächstgelegenen Rasterpunkts zu interpolieren.
Bestimmung der Anzahl der Bewohner eines Gebäudes
Die Anzahl der Bewohner eines Wohngebäudes ist ein wichtiger Zwischenparameter für die Abschätzung der Lärmexposition. Leider stehen Daten zu diesem Parameter nicht immer zur Verfügung. Im Folgenden ist angegeben, wie sich dieser Parameter aus besser verfügbaren Daten ableiten lässt.
Es werden folgende Symbole verwendet:
| BA | = base area (Gebäudegrundfläche), |
| DFS | = dwelling floor space (Wohnfläche), |
| DUFS | = dwelling unit floor space (Fläche der Wohneinheit), |
| H | = height (Gebäudehöhe), |
| FSI | = dwelling floor space per inhabitant (Wohnfläche je Bewohner), |
| Inh | = number of inhabitants (Anzahl der Bewohner), |
| NF | = number of floors (Geschossanzahl), |
| V | = volume of residential buildings (Rauminhalt von Wohngebäuden). |
Zur Berechnung der Anzahl der Bewohner ist je nach Verfügbarkeit der Daten entweder das Verfahren "Fall 1" oder das Verfahren "Fall 2" heranzuziehen.
FALL 1: Daten zur Anzahl der Bewohner sind verfügbar
1A: Die Anzahl der Bewohner ist bekannt oder wurde ausgehend von den Wohneinheiten geschätzt. In diesem Fall ist die Anzahl der Bewohner eines Gebäudes die Summe der Anzahl der Bewohner aller Wohneinheiten im Gebäude:
 |
(2.8.1) |
1B: Die Anzahl der Bewohner ist nur für Gesamteinheiten bekannt, die größer sind als ein Gebäude, z.B. Blockränder, Häuserblocks, Quartiere oder eine ganze Gemeinde. In diesem Fall wird die Anzahl der Bewohner eines Gebäudes ausgehend vom Rauminhalt des Gebäudes geschätzt:
| Inhbuilding = (Vbuilding/Vtotal) x Inhtotal | (2.8.2) |
Der Index "total" bezieht sich hier auf die jeweils betrachtete Gesamteinheit. Der Rauminhalt des Gebäudes ist das Produkt aus seiner Grundfläche und seiner Höhe:
| Vbuilding = BAbuilding x Hbuilding | (2.8.3) |
Ist die Gebäudehöhe nicht bekannt, ist sie auf Grundlage der Geschossanzahl NFbuilding unter Annahme einer durchschnittlichen Geschosshöhe von 3 m zu schätzen:
| Hbuilding = NFbuilding x 3 m | (2.8.4) |
Ist die Geschossanzahl ebenfalls nicht bekannt, ist ein für das Quartier oder den Stadtteil repräsentativer Standardwert für die Geschossanzahl zu verwenden.
Der Gesamtrauminhalt Vtotal von Wohngebäuden in der betrachteten Gesamteinheit wird als Summe der Rauminhalte aller Wohngebäude in der Gesamteinheit berechnet:
 |
(2.8.5) |
FALL 2: Daten zur Anzahl der Bewohner nicht verfügbar
In diesem Fall wird die Anzahl der Bewohner auf der Grundlage der durchschnittlichen Wohnfläche je Bewohner FSI geschätzt. Ist dieser Parameter nicht bekannt, ist ein nationaler Standardwert zu verwenden.
2A: Die Wohnfläche ist auf Basis der Wohneinheiten bekannt. In diesem Fall wird die Anzahl der Bewohner jeder Wohneinheit wie folgt geschätzt:
| (2.8.6) |
Nun kann die Anzahl der Bewohner des Gebäudes wie in FALL 1a geschätzt werden.
2B: Die Wohnfläche ist für das gesamte Gebäude bekannt, d. h. die Summe der Wohnflächen aller Wohneinheiten im Gebäude ist bekannt. In diesem Fall wird die Anzahl der Bewohner wie folgt geschätzt:
| Inhbuilding = (DFSbuilding/FSI) | (2.8.7) |
2C: Die Wohnfläche ist nur für Gesamteinheiten bekannt, die größer sind als ein Gebäude, z.B. Blockränder, Häuserblocks, Quartiere oder eine ganze Gemeinde.
In diesem Fall wird die Anzahl der Bewohner eines Gebäudes ausgehend vom Rauminhalt des Gebäudes wie im FALL 1B beschrieben und die Gesamtzahl der Bewohner wie folgt geschätzt:
| Inhtotal = (DFStotal/FSI) | (2.8.8) |
2D: Die Wohnfläche ist unbekannt. In diesem Fall wird die Anzahl der Bewohner eines Gebäudes wie in FALL 2B beschrieben und die Wohnfläche wie folgt geschätzt:
| DFSbuilding = BAbuilding x 0,8 x NFbuilding | (2.8.9) |
Der Faktor 0,8 ist der Umrechnungsfaktor Bruttogeschossfläche -> Wohnfläche. Ist ein anderer Faktor als repräsentativ für die Gegend bekannt, ist dieser zu verwenden und eindeutig zu dokumentieren.
Ist die Geschossanzahl des Gebäudes nicht bekannt, ist sie anhand der Gebäudehöhe Hbuilding zu schätzen, was typischerweise eine gebrochene Geschosszahl zum Ergebnis hat:
| NFbuilding = (Hbuilding/3 m) | (2.8.10) |
Sind weder die Gebäudehöhe noch die Anzahl der Geschosse bekannt, ist ein für das Quartier oder den Stadtteil repräsentativer Standardwert für die Geschossanzahl zu verwenden.
Zuweisung von Empfangspunkten zu Gebäudefassaden
Die Ermittlung der Lärmexposition der Bevölkerung beruht auf einer Empfangspunkthöhe von 4 m über der Geländehöhe vor Wohngebäudefassaden.
Zur Berechnung der Anzahl der Bewohner ist entweder das Verfahren Fall 1 oder das Verfahren Fall 2 für bodenseitige Lärmquellen zu verwenden. Für gemäß 2.6 berechneten Fluglärm werden alle Bewohner eines Gebäudes mit dem nächstgelegenen Berechnungspunkt im Gitter assoziiert.
FALL 1
Abbildung a Beispiel für Empfangsorte um ein Gebäude herum nach dem Verfahren FALL 1
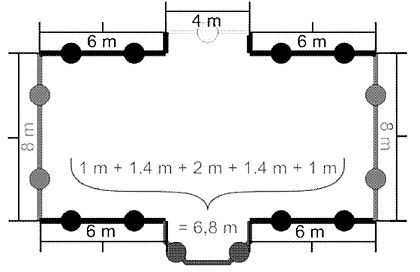
FALL 2
Abbildung b Beispiele für Empfangsorte um ein Gebäude herum nach dem Verfahren FALL 2
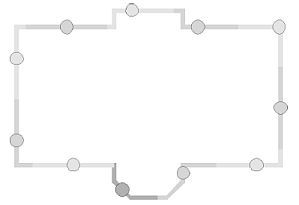
3. Eingabedaten
Eingabedaten, die jeweils im Zusammenhang mit den oben beschriebenen Methoden zu verwenden sind, werden in Anlage F bis Anlage I aufgeführt.
Sind in Anlage F bis Anlage I aufgeführte Eingabedaten nicht anwendbar oder verursachen Abweichungen vom wahren Wert, die die in 2.1.2 und 2.6.2 genannten Bedingungen nicht erfüllen, so können andere Werte verwendet werden, vorausgesetzt, die verwendeten Werte und die Methodik ihrer Herleitung sind hinreichend dokumentiert, wozu auch ein Nachweis der Eignung gehört. Diese Informationen sind öffentlich zur Verfügung zu stellen.
4. Messmethoden
Werden aus einem beliebigen Grund Messungen durchgeführt, müssen diese entsprechend den Grundsätzen für die zeitlich gemittelten Messungen nach ISO 1996-1:2003 und ISO 1996-2:2007 oder, für Fluglärm, nach ISO 20906:2009 erfolgen.
2) Ein Beispiel für eine spezielle Konfiguration ist ein Netz kleiner Hindernisse, die in einer Ebene und in regelmäßigen Abständen angeordnet sind.
3) Eigentlich unterhalb des Flugzeugs senkrecht zur Tragflächenachse und Flugrichtung; angenommen als vertikal unterhalb des Flugzeugs bei Nichtkurvenflug (d. h. Nichtschrägflug).
4) Die Zeit wird über die Fluggeschwindigkeit ausgewiesen.
5) Versetzte Landeschwellenkönnen durch die Festlegung zusätzlicher Start-/Landebahnenberücksichtigt werden.
6) Mitunter werden berechnete Pegel bei 4 m oder höher angefragt. Wie ein Vergleich der Messungen in 1,2 m und 10 m Höhe und eine theoretische Berechnung der Bodeneffekte zeigen, sind die Abweichungen des A-bewerteten Lärmexpositionspegels relativ unempfindlich gegenüber der Empfängerhöhe. Die Abweichungen sind im Allgemeinen kleiner als 1 Dezibel, es sei denn, der maximale Schalleinfallswinkel ist kleiner als 10° und das A-bewertete Spektrum am Empfänger hat sein Maximum im Bereich von 200 bis 500 Hz. Derartige Spektren mit vorwiegend niedrigen Frequenzen können z.B. in großen Entfernungen bei Triebwerken mit niedrigem Nebenstromverhältnis sowie bei Propellermotoren mit diskreten tieffrequenten Tönen auftreten.
7) Flugdatenschreiberspeichern ausführliche Betriebsdaten. Diese sind jedoch nicht ohne weiteres zugänglich und in der Beschaffung teuer. Daher ist ihre Verwendung für Lärmmodellierungszwecke in der Regel auf besondere Projekte und Modellentwicklungsstudien beschränkt.
8) In der Regel gemessen als Höhe über NN (d. h. relativ zu 1.013 mb) und vom Flughafenüberwachungssystem um die Flughafenhöhe korrigiert.
9) In der Regel verlaufen die Achsen der lokalen Koordinaten parallel zur Achse der Karte, auf der die Konturen gezeichnet werden. Zuweilen ist es jedoch sinnvoll, die x-Achse parallel zur Start-/Landebahn zu wählen, um ohne Heranziehung eines feinmaschigen Rechengitters symmetrische Konturen zu erhalten (siehe Abschnitte 2.7.26 bis 2.7.28).
10) Bei unebenem Boden kann sich der Beobachter oberhalb des Flugzeugs befinden. In diesem Fall wird z' (und der entsprechende Höhenwinkel β - siehe Kapitel 4) gleich null gesetzt.
11) Wie dies am besten erreicht wird, bleibt dem Benutzer überlassen, da die Berechnung davon abhängt, wie die Kurvenradien definiert sind. Ist der Ausgangspunkt eine Folge von geraden oder bogenförmigen Abschnitten, besteht eine relativ einfache Möglichkeit darin, Querneigungswinkel-Übergangssegmente am Beginn und am Ende der Kurve einzufügen, bei denen sich das Flugzeug mit konstanter Rate um die Längsachse neigt (z.B. ausgedrückt in °/m oder °/s).
12) Dazu sollte die Gesamtlänge des Kurses über Grund stets größer sein als die Gesamtlänge des Flugprofils. Dies lässt sich gegebenenfalls erreichen, indem dem letzten Segment des Kurses über Grund gerade Segmente geeigneter Länge hinzugefügt werden.
13) Auf diese einfache Weise definiert, ist die Gesamtlänge der segmentierten Bahn etwas kleiner als die der kreisförmigen Bahn. Der sich daraus ergebende Konturenfehler ist jedoch unerheblich, wenn die Winkelschritte unter 30° liegen.
14) Selbst wenn die Triebwerksleistungseinstellungen entlang eines Segments konstant bleiben, können sich Vortriebskraft und Beschleunigung aufgrund einer Luftdichteänderung mit zu- oder abnehmender Höhe verändern. Für die Zwecke der Lärmmodellierung sind diese Änderungen jedoch in der Regel unerheblich.
15) Dieser Wert wurde in der vorigen Ausgabe des ECAC Doc. 29 empfohlen, gilt jedoch nach wie vor als vorläufig, bis weitere experimentelle Belegdaten vorliegen.
16) Der LE mit 10 dB-down-time kann bis zu 0,5 dB niedriger sein als der über eine längere Dauer bewertete LE. Mit Ausnahme von schrägen Abständen, bei denen die Pegel hoch sind, lassen Fremdgeräusche längere Messintervalle als nicht praktikabel erscheinen, und Werte mit 10dB-down-time sind die Norm. Da Studien zu den Wirkungen von Lärm (zur "Kalibrierung" der Lärmkonturen) sich ebenfalls eher auf Werte mit 10dB-down-time stützen, gelten die ANP-Tabellenangaben als vollkommen angemessen.
17) Obwohl der Begriff einer unendlich langen Flugbahn für die Definition des Ereignis-Lärmexpositionspegels LE eine Rolle spielt, ist er weniger relevant im Falle des Ereignis-Maximalpegels Lmax, der vom abgestrahlten Lärm des Flugzeugs an einer bestimmten Position oder nahe des kleinsten Vorbeiflugabstands bestimmt wird. Für die Modellierungszwecke wird der NPD-Abstandsparameter als Mindestabstand zwischen dem Beobachter und dem Segment definiert.
18) Gemäß NPD-Spezifikationen müssen die Daten auf Messungen des stationären Geradeausflugs, nicht notwendigerweise des waagerechten Flugs, basieren. Zur Schaffung der notwendigen Flugbedingungen kann die Testflugbahn zur Horizontalen geneigt werden. Wie jedoch zu sehen sein wird, führen geneigte Flugbahnen zu Berechnungsproblemen, so dass es bei Verwendung der Daten zur Modellierung sinnvoll ist, die Quellenbahnen als sowohl gerade als auch waagerecht zu visualisieren.
19) Die Korrektur heißt Dauerkorrektur, weil sie die Wirkungen der Geschwindigkeit des Flugzeugs auf die Dauer des Schallereignisses berücksichtigt, wobei von der einfachen Annahme ausgegangen wird, dass bei sonst gleichen Bedingungen die Dauer, und somit die empfangene Ereignisschallenergie, umgekehrt proportional zur Quellgeschwindigkeit ist.
20) Ist das Gelände nicht eben, kann der Höhenwinkel unterschiedlich bestimmt werden. Hier wird er durch die Höhe des Flugzeugs über dem Beobachtungspunkt und der Schrägentfernung bestimmt, d. h. unter Vernachlässigung der Geländegradienten und von Hindernissen im Schallausbreitungsweg (siehe Abschnitte 2.7.6 und 2.7.10). Sollte sich der Empfängerpunkt oberhalb des Flugzeugs befinden, so wird der Höhnwinkel β auf null gesetzt.
21) Ein" Freifeldpegel" ist der Pegel, der beobachtet würde, wenn die Bodenoberfläche nicht vorhanden wäre.
22) Der Wind- und der Temperaturgradient sowie Turbulenzen hängen zum Teil von der Unebenheit und den Wärmeübertragungseigenschaften der Oberfläche ab.
23) Bei einem Beobachterrechts vom Segment würde zu β + z werden (siehe Abschnitt 2.7.19).
24) Je nach Definition des verwendeten Lärmindex können die Zeiträume von diesen drei abweichen.
|
weiter . |
(Stand: 19.08.2020)
Alle vollständigen Texte in der aktuellen Fassung im Jahresabonnement
Nutzungsgebühr: 90.- € netto (Grundlizenz)
(derzeit ca. 7200 Titel s.Übersicht - keine Unterteilung in Fachbereiche)
Die Zugangskennung wird kurzfristig übermittelt
? Fragen ?
Abonnentenzugang/Volltextversion